

Лекция 8. Проектирование регуляторов технологических агрегатов
9.1. Общие замечания
Под проектированием регуляторов САУ, а в частности электроприводов электромеханических систем, понимают инженерную задачу, заключающуюся в выборе типа и параметров корректирующих устройств, обеспечивающих требуемые динамические свойства проектируемого привода. Методологический подход к решению проблемы синтеза большинства электроприводов заключается в разделении проектирования на ряд этапов, основными из которых являются:
обоснование рациональной структуры электропривода и типа корректирующих устройств, обеспечивающих необходимые запас устойчивости и качество переходных процессов при линеаризованной непрерывной части системы;
параметрический синтез корректирующих устройств при линеаризованных характеристиках основных элементов системы;
выбор и расчет специальных корректирующих устройств, предназначенных для обеспечения заданной точности или близких к оптимальным режимов работы электропривода.
Наиболее ответственным и наименее подверженным машинным методам проектирования является первый этап этих работ, а именно выбор типа корректирующих устройств и способов их включения. Поэтому на этом этапе существенную роль играют опыт, профессиональная подготовка и интуиция инженера-проектировщика.
Универсальным методом параметрического синтеза корректирующих устройств, проводимых с учетом основных особенностей электропривода, является его моделирование. Однако этот метод не может быть эффективно использован без предварительного аналитического исследования проектируемого объекта, предназначенного для обоснования выбранной структуры электропривода, определения его качественных показателей и предварительного выбора параметров корректирующих устройств. При этом аналитические методы позволяют исследовать вопрос в общем виде и среди множества возможных решений проблемы синтеза САУ найти близкое к оптимальному.
В современной научно-технической литературе, посвященной вопросам теории САУ, можно проследить несколько подходов к определению структуры и параметров корректирующих устройств. Первый заключается в определении желаемых частотных характеристик системы и преобразовании исходных частотных характеристик к желаемому виду. Этот метод называется методом логарифмических частотных характеристик. Сутью второго метода является компенсация инерционных свойств управляемого объекта с использованием вложенных друг в друга контуров управления отдельными составляющими вектора состояния объекта. Реализация такого подхода к выбору корректирующих устройств осуществляется в рамках методов подчиненного управления. Последний метод заключается в формировании заданного распределения корней характеристического полинома системы посредством введения обратных связей по отдельным составляющим вектора состояния управляемого объекта. Этот метод используется при построении систем модального управления.
9.2. Синтез сау методом логарифмических частотных характеристик
Метод логарифмических частотных характеристик используется для определения частотных передаточных функций корректирующих устройств, приближающих динамические показатели к желаемым. Наиболее эффективно этот метод применяется для синтеза систем с линейными или цифровыми корректирующими устройствами, поскольку в таких системах частотные характеристики звеньев не зависят от амплитуды входных сигналов. Синтез САУ методом логарифмических частотных характеристик включает в себя следующие операции.
На первом этапе по известной передаточной
функции неизменяемой части САУ строится
ее логарифмическая частотная характеристика
![]() .
В большинстве случаев достаточно
использование асимптотических частотных
характеристик.
.
В большинстве случаев достаточно
использование асимптотических частотных
характеристик.
На втором этапе строится желаемая
логарифмическая частотная характеристика
САУ
![]() ,
которая удовлетворяла бы поставленным
требованиям. Определение вида желаемой
ЛАЧХ проводится исходя из назначения
системы, времени переходного процесса,
перерегулирования и коэффициентов
ошибок. При этом часто используются
типовые частотные характеристики для
систем с разным порядком астатизма. При
построении желаемой ЛАЧХ необходимо
быть уверенным, что вид амплитудной
характеристики полностью определяет
характер переходных процессов и нет
необходимости вводить в рассмотрение
фазовую частотную характеристику.
Последнее справедливо в случае
минимально-фазовых систем, для которых
характерно отсутствие нулей и полюсов,
расположенных в правой полуплоскости.
При выборе желаемых логарифмических
амплитудной и фазовой характеристик
важно, чтобы последняя обеспечила
требуемый запас устойчивости при частоте
среза системы. Для этого используют
специальные номограммы, вид которых
приводится на рис. 1.
,
которая удовлетворяла бы поставленным
требованиям. Определение вида желаемой
ЛАЧХ проводится исходя из назначения
системы, времени переходного процесса,
перерегулирования и коэффициентов
ошибок. При этом часто используются
типовые частотные характеристики для
систем с разным порядком астатизма. При
построении желаемой ЛАЧХ необходимо
быть уверенным, что вид амплитудной
характеристики полностью определяет
характер переходных процессов и нет
необходимости вводить в рассмотрение
фазовую частотную характеристику.
Последнее справедливо в случае
минимально-фазовых систем, для которых
характерно отсутствие нулей и полюсов,
расположенных в правой полуплоскости.
При выборе желаемых логарифмических
амплитудной и фазовой характеристик
важно, чтобы последняя обеспечила
требуемый запас устойчивости при частоте
среза системы. Для этого используют
специальные номограммы, вид которых
приводится на рис. 1.
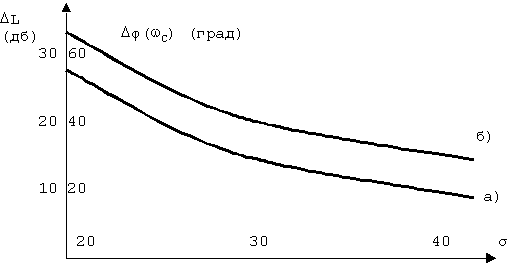
Рис. 1. Кривые для выбора запаса устойчивости по амплитуде (а)и фазе (б) в зависимости от величины перерегулирования.
Удовлетворительные качественные показатели САУ в динамических режимах достигаются при пересечении амплитудной характеристики оси абсцисс с наклоном –20 дб/дек.

Рис. 2. Определение характеристик ПКУ
На последнем этапе из сравнения частотных
характеристик некорректированной
системы и желаемых частотных характеристик
определяются частотные свойства
корректирующего устройства. При
использовании линейных средств коррекции
логарифмическая частотная характеристика
последовательного корректирующего
устройства (ПКУ)
![]() может
быть найдена вычитанием ЛАЧХ
некорректированной системы из желаемой
ЛАЧХ САУ, то есть
может
быть найдена вычитанием ЛАЧХ
некорректированной системы из желаемой
ЛАЧХ САУ, то есть
![]() .
.
Следовательно
![]() .
.
Следует отметить, что по передаточной функции последовательного корректирующего устройства легко определить передаточные функции звеньев в цепи прямой или обратной связи, с помощью которых осуществляется коррекция динамических показателей САУ.
Следующим этапом является определение способа реализации, схемы и параметров корректирующего устройства.
Последним этапом синтеза устройства коррекции является проверочный расчет САУ, который заключается в построении графиков переходных процессов для системы с выбранным корректирующим устройством. На этом этапе целесообразно использование средств вычислительной техники и моделирующих программных комплексов VinSim, WorkBench, CircuitMaker, MathCAD.