

3.1. Особенности конструкции
Инерциальный измерительный модуль содержит три лазерных гироскопа ЛГ КМ-11 (периметр резонатора – 44 мм, вес - 3.5 кг; дрейф нуля – 0.01 0/ч), три акселерометра АК-10 (размеры - 40х40х25 мм, вес – 50 грамм; дрейф нуля – 10-3м/с2) и электронные модули, обеспечивающие функционирование инерциальных чувствительных элементов и преобразование выходных сигналов в цифровую форму, установленные на вращающемся основании (рис. 3.1 и рис. 3.2).
Основным несущим элементом конструкции ИИМ является металлический конус, выполненный из дюралюминия для исключения намагниченности. Своей нижней частью конус стыкуется с устройством вращения посредством трех стыковочных узлов. Сверху на конус одета и приклеена к нему трехгранная призма, выполненная из ситалла.
На гранях призмы располагаются лазерные гироскопы. Крепление корпусов кольцевых лазеров к ситалловой призме производится с помощью клея в 4-х точках через короткие цилиндрические проставки. Это сделано для того, чтобы между призмой и резонатором можно было пропустить нижнюю часть двойного пермаллоевого экрана при минимальном нарушении его целостности. В верхней части призмы и в середине конуса по оси вращения имеется сквозная цилиндрическая полость. В эту полость сверху вставляется блок акселерометров, выполненный из ситалла. Он жестко крепится с помощью клея к трехгранной призме, образуя единый ситалловый блок чувствительных элементов (БЧЭ).
1
2
3
4
5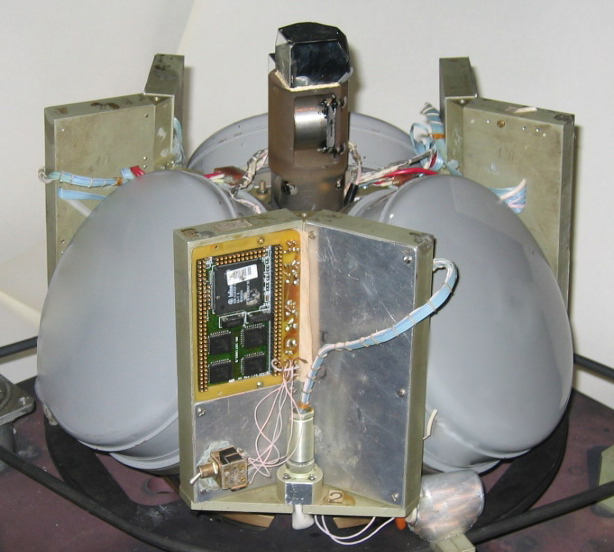





Рис. 3.1. Опытный образец ИИМ на ЛГ КМ-11
(1 - ЛГ в магнитных экранах; 2 – акселерометры; 3 – электронные модули; 4 – дюралевый конус; 5 – призма из ситалла)
1

2
Сверху на блок акселерометров с помощью клея жестко крепится трехгранный оптический элемент, выполненный из ситалла в виде куба с тремя зеркальными гранями. Этот элемент физически задает приборную систему координат ИИМ и используется, в частности, при калибровке измерительного модуля.
Данная конструкция БЧЭ позволяет с высокой точностью сохранять взаимное положение датчиков, как во времени, так и при воздействии неблагоприятных факторов, например, изменения температуры.
К нижней части металлического конуса симметрично по окружности прикреплены три горизонтальных площадки. В центре каждой из площадок установлена вертикальная стойка, средняя часть которой с помощью перемычки соединена с верхней частью металлического конуса.
Конус с площадками, вертикальные стойки и перемычки образуют жесткий замкнутый металлический каркас ИИМ, практически развязанный от ситаллового БЧЭ. К этому каркасу крепятся электронные блоки, разъёмы и, если будет необходимо, внешний магнитный экран. Сверху на вертикальные стойки во время калибровки ИИМ может быть временно закреплена горизонтальная площадка для возможности размещения дополнительного оборудования, например, точного уровня.
Электроника ИИМ размещается в 6-ти блоках, выполненных в виде замкнутых экранирующих вертикальных коробок. Эти коробки помещаются на площадках (по две на каждой) и прикреплены, кроме того, к вертикальным стойкам. На площадках также расположены два блока вторичных источников питания и места крепления для трех (по одному на каждой площадке) разъемов РС-10 (вилка), которыми заканчивается токоподвод устройства вращения. Электроника ИИМ в свою очередь замыкается на три кабельных разъема РС-10 (розетка), расположенных на кабелях, закрепленных с необходимой свободой (для возможности завинчивания) в районе каждой из площадок.
ИИМ термостатирован при рабочей температуре 20…25оС с точностью 1оС. Термостатирование приводит к повышению точности и надежности ЛГ.
3.2. Технические характеристики
ИИМ в корпусе системы совершает два оборота в одну сторону, затем быстрый реверс и два оборота в другую сторону. Время одного оборота составляет 3.6 с.
Измеряемые величины - квазикоординаты: приращения на рабочей частоте угла поворота (от ЛГ) и кажущейся линейной скорости (от акселерометров) ИИМ в проекциях на приборные оси модуля.
Частота опроса датчиков - 1 кГц
Частота выдачи информации - 200 Гц
Канал выдачи информации - 3-х проводной CAN интерфейс
Напряжение питания - 24 В
Потребляемая мощность - не более 45 Вт
Габаритные размеры - Ø370мм, h = 261мм
Вес ~ 20…25кг
3.3. Обеспечивающая электроника
Электроника, расположенная в ИИМ, решает задачи обеспечения функционирования ЛГ, а также съема, преобразования и передачи по каналу связи информации с ЛГ и акселерометров.
Для обеспечения работы 3-х ЛГ необходимо организовать для каждого из них начальный поджиг, систему регулирования амплитуды выходного сигнала и систему регулировки оптической длины периметра.
Амплитуда сигнала регулируется путем изменения мощности высокочастотной накачки, которая в свою очередь зависит от напряжения питания генератора накачки.
Регулирование оптической длины периметра осуществляется путем изменения плотности воздуха в одном из замкнутых каналов ЛГ. Длину периметра необходимо держать в максимуме генерации сигнала. Такие экстремальные системы требуют подачи пилот-сигнала в контур регулирования и система должна держать близкую к нулю величину отклика на пилот-сигнал. Пилот-сигнал вводится в контур регулирования периметра с помощью пьезокерамического вибратора.
Решение всех задач, связанных с поджигом, регулировкой амплитуды, периметра и контролем за работой этих систем, осуществляется с помощью микроконтроллера типа ММ 167 фирмы PHYTEC (Германия) с применением дополнительных внешних преобразователей и усилителей.
Для уменьшения выделяемой мощности в контурах регулирования управление конечными исполнительными элементами (генератором накачки и нагревателем) осуществляется сигналом с широтно-импульсной модуляцией. Тогда вместо линейных усилителей применяются ключевые схемы, а для подавления частоты ШИМ в контуре регулирования амплитуды применяются дополнительные фильтры. В контуре регулирования периметра частота ШИМ подавляется самим нагревателем.
Задача съема, преобразования и передачи информации решается с помощью второго микроконтроллера ММ 167.
Электроника ИИМ содержит три почти одинаковых канала обработки информации с датчиков, поэтому рассмотрим блок-схему одного из каналов. Фотоприемник преобразует оптический сигнал бегущей интерференционной картины в электрический синус-косинусный сигнал. После усиления в усилителях эти сигналы поступают на формирователи, где из них формируется меандр, поступающий для дальнейшей обработки на вход реверсивного счетчика микроконтроллера обработки информации. Меандр необходим для обеспечения устойчивой работы реверсивного счетчика микроконтроллера.
Для обеспечения работы ЛГ синус-косинусный сигнал также поступает на вход детектора, где из него формируется сигнал, пропорциональный амплитуде синус-косинусного сигнала и уже он поступает на вход АЦП микроконтроллера жизнеобеспечения. Микроконтроллер формирует ШИМ сигнал регулировки амплитуды, которая после усиления ключевой схемой и фильтрации поступает на вход генератора накачки, задавая мощность накачки и, следовательно, амплитуду выходного сигнала ЛГ. Микроконтроллер изменяет скважность ШИМ таким образом, чтобы амплитуда выходного сигнала ЛГ оставалась постоянной (2В на выходе усилителя).
Контур регулирования периметра также использует сигнал с детектора. В микроконтроллере методом синхронного детектирования из него выделяется сигнал отклика на пилот-сигнал. Сам пилот-сигнал в виде меандра частотой 230 гц формируется в микроконтроллере, затем усиливается ключевым усилителем и поступает на вход пьезокерамического вибратора. Вибратор установлен в корпусе нагревателя и при его работе происходит модуляция плотности воздуха в канале ЛГ и, следовательно, модуляция периметра. Следствием этого и является появление сигнала отклика в выходном сигнале ЛГ. Микроконтроллер формирует ШИМ сигнал регулировки периметра, который через ключевой усилитель поступает на нагреватель. Скважность этого сигнала определяет плотность воздуха в канале ЛГ и, в конечном счете, оптическую длину периметра. Микроконтроллер так меняет скважность ШИМ последовательности, чтобы сигнал отклика был близок к нулю, что при правильной фазировке контура регулирования означает, что частота резонатора ЛГ находится в максимуме усиления лазерного перехода.
Начальный поджиг ЛГ осуществляется генератором поджига, который формирует импульсы поджига амплитудой 300В, поступающие на вход трансформатора поджига. Генератор поджига управляется микроконтроллером жизнеобеспечения, который отключает генератор, когда появится выходной сигнал ЛГ или по прошествии заданного времени поджига 30 сек. В последнем случае формируется признак отказа ЛГ.
В ИИМ применяются акселерометры типа АК-10. Эти акселерометры содержат внутри всю электронику жизнеобеспечения и не требуют какого-либо внешнего управления. Аналоговый сигнал акселерометра поступает на вход схемы преобразователя аналог-частота и далее на счетчик микроконтроллера обработки информации.
Каждый из микроконтроллеров имеет встроенный CAN интерфейс. Эти интерфейсы через буферные схемы связаны между собой и внешним разъемом ИИМ трехпроводной линией, что даёт возможность передавать информацию внешнему потребителю и друг другу. Кроме того, микроконтроллер формирует для внешнего потребителя синхроимпульсы частотой 1 кГц, синфазные с моментами опроса датчиков.
ИИМ соединяется электрически с вращающемся токоподводом посредством трех разъемов С1, С2 и С3 типа РС-10.
П.4. Алгоритмы основных задач БИНС на ДУС с вычислением в задаче ориентации в качестве промежуточного кинематического параметра вектора Эйлера
4.1. МО задачи формирования приращений на рабочей частоте (частоте решения задачи ориентации) векторов кажущихся линейной скорости, линейного перемещения и вектора квазикоординат