

4.4.1 Классификация дос
По принципу контроля выполнения программы:
- датчики положения - выдают информацию о конкретном положении рабочего органа в каждый момент времени по отношению к какой-либо фиксированной точке. Каждому значению контролируемого перемещения они обеспечивают единственное значение выходного сигнала. Сюда относятся емкостные датчики (с переменным зазором), магнитные (с переменным воздушным зазором) и др. Перспективным является применение датчиков положения которые сохраняют информацию о перемещении при отключении напряжения.
- датчики перемещения - выдают информацию о величине и направлении перемещения в каждый момент времени. Действительное положение РО относительно фиксированной точки можно определить суммированием всей информации за определенное время. Выходной сигнал датчика перемещения может однозначно определить положение каждой точки измеряемого элемента только при наличии в системе счетчика полных циклов. Такие датчики в настоящее время наиболее распространенные.
По конструкции:
линейные – используются для измерения линейных перемещений;
круговые – для измерения угла поворота контролируемых элементов.
По характеру выдаваемой информации:
дискретные (цифровые);
непрерывные (аналоговые).
По принципу работы
индукционные (резольвер, редусин, индуктосин);
фотоэлектрические (оптические).
Преимущественное применение в станках с ЧПУ нашли ДОС, в которых высокая точность достигается аналоговым методом за счет интерполяции интервала между опорными точками, которые образуют измерительную шкалу. Такими точками могут быть витки ходового винта или зигзагообразная обмотка индуктосина.
Для станков классов точности Н и П применяют круговые оптические ИП и резольверы, доя станков класса В – линейные оптические и индуктосины.
Дискретность и погрешность перемещения зависит от класса датчика. Самый высокий класс – 6, самый низкий – 1. Для линейных ИП погрешность нормируется, кроме этого, в зависимости от длины шкалы.
4.4.2 Индукционные датчики
Вращающийся трансформатор (резольвер)
В ращающийся
трансформатор (рис 4.11) представляет
собой электрическую микромашину
переменного тока, у которой выходное
напряжение является функцией входного
напряжения и угла поворота ротора.
Зависимость выходного напряжения от
входного является линейной, а от угла
поворота ротора - синусоидальной. ВТ
предназначены для преобразования угла
поворота ротора в изменение фазы
синусоидального напряжения.
ращающийся
трансформатор (рис 4.11) представляет
собой электрическую микромашину
переменного тока, у которой выходное
напряжение является функцией входного
напряжения и угла поворота ротора.
Зависимость выходного напряжения от
входного является линейной, а от угла
поворота ротора - синусоидальной. ВТ
предназначены для преобразования угла
поворота ротора в изменение фазы
синусоидального напряжения.
Сила тока холостого хода 43 мА при напряжении 26 В и частоте 400 Гц соответствует входному индуктивному сопротивлению 600 Ом и реактивной мощности около 1 Вт.
По характеру токосъемника ВТ бывают контактные (съем контактными кольцами и гибкими проводниками) и бесконтактными (съем кольцевыми трансформаторами). Контактные более точные, но имеют меньший срок службы.
 В
В Т
состоит из двух основных частей: статора
1 и ротора 3 (рис. 4.12). На статоре и роторе
имеются равномерно распределенные
пазы, в которых размещено по две обмотки.
Т
состоит из двух основных частей: статора
1 и ротора 3 (рис. 4.12). На статоре и роторе
имеются равномерно распределенные
пазы, в которых размещено по две обмотки.
Обмотки статора и ротора выполняют обычно одинаковыми, т.е. у них совпадает число витков, схема соединения витков и сечение обмоточного провода.
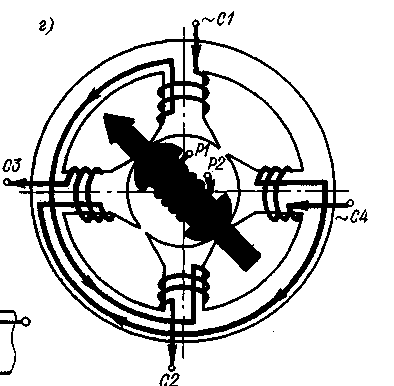
Статор вращающегося трансформатора (рис. 4.12,в) имеет две однофазные обмотки С1—С2 и СЗ—С4, сдвинутые на 90° относительно диффузора. Ротор также имеет две обмотки, включенные последовательно (на рисунке для упрощения показана одна обмотка Р1—Р2). Магнитопровод изготовляют из листов электрической стали или пермоллоя. На роторе и статоре равномерно расположены пазы, в которых размещены взаимно перпендикулярные обмотки. Первичными обмотками вращающегося трансформатора (ВТ) чаще всего являются обмотки статора, а вторичными — обмотки ротора, который связан с перемещающимся элементом. При повороте ротора, который собственно и является первичным датчиком, с него снимается синусоидальное напряжение.
Статорные обмотки питаются переменным током повышенной частоты – 400, 1000, 2000, 4000 Гц и создают вращающееся магнитное поле, скорость которого соответствует частоте питающего напряжения.
Выводы статорных обмоток подводят непосредственно к соединительным панелям, выводы роторных обмоток вращающихся трансформаторов контактного типа выводят через токосъемное устройство: четыре контактных кольца 5 и щетки 6.
При подключении обмоток статора к сети переменного тока образуется вращающееся магнитное поле. Стрелка на рис.4.12,в показывает результирующий магнитный поток, проходящий через ротор в данный момент времени. Магнитное поле вращается со скоростью, соответствующей частоте питания обмоток статора. Вращающееся магнитное поле индуцирует в обмотке ротора переменное напряжение, амплитуда которого почти постоянная.
В двухобмоточном кольцевом трансформаторе (рис. 4.12,б) обмотки 5 и 7 расположены, соответственно, на кольцевых магнитопроводах 6 и 8.
При подаче на обмотку возбуждения переменного напряжения в воздушном зазоре возникает пульсирующий магнитный поток Фв, который наводит во вторичных обмотках ЭДС, пропорциональные синусу и косинусу угла поворота ротора.
При повороте ротора, соединенного с ходовым винтом или валом двигателя, фаза ЭДС во вторичных обмотках сдвигается относительно синусоидального входного сигнала на угол, пропорциональный углу поворота вала ротора. По величине сдвига фаз можно определить угол поворота вала и, соответственно, величину линейного перемещения рабочего органа.
Длина бесконтактных вращающихся трансформаторов больше, чем контактных, в связи с необходимостью размещения переходных трансформаторов. Однако существенное повышение надежности окупает этот недостаток.
Основным требованием, предъявляемым к вращающимся трансформаторам, является максимальная точность преобразования угла в напряжение по заданному функциональному закону.
Конструкция вращающихся трансформаторов и технология их изготовления должны обеспечивать при повороте ротора изменение взаимоиндуктивности между обмотками статора и ротора по закону, наиболее близкому к идеальной синусоиде.
Погрешность ВТ оценивается отклонением амплитуды выходного напряжения от синусоиды при вращении ротора. Допустимое отклонение от идеального закона во многих случаях не должно превышать 0,005 %. Отклонению 0,01% соответствует наибольшая угловая погрешность 15`, которая проявляется при углах поворота ротора кратным 450.
Недостаток обычных ВТ — ограниченный гарантированный срок службы вследствие наличия щеток и контактных колец на роторе. В связи с этим в станках желательно применять бесконтактные ВТ, срок службы которых практически не ограничен.
Индуцированное в обмотке ротора напряжение является выходным сигналом, фаза которого сдвинута относительно синусоидального входного сигнала статора. Этот сдвиг фазы зависит от положения ротора. Если ротор расположен вертикально, то в нем будет индуцироваться положительное максимальное напряжение, тогда и его синусоидальная обмотка будет иметь положительное максимальное возбуждение. В этом случае фазы выходного и входного сигналов совпадают. Таким образом, при повороте вала ротора механический угол вращения преобразуется в электрический, т. е. в сдвиг фаз.
Индукционные редусины
Помимо однополюсных ВТ применяют многополюсные ВТ с большим количеством полюсов (5-180) называют редусин. Большое количество полюсов облегчает их использование в станках с ЧПУ.
Многополюсные преобразователи позволят повысить точность преобразования и передачи угла.
Индукционные редуктосины (рис. 4.13) – это, по сути, многополюсные вращающиеся трансформаторы с безобмоточным ротором. Статор редуктосина выполняется из листовой электротехнической стали или пермаллоя и имеет большое число зубцов Z1 на внутренней поверхности. Ротор выполняется в виде зубчатого колеса из электротехнической стали или также изготавливается из листового материала.
Р исунок
4.13 – Схема индукционного редуктосина
исунок
4.13 – Схема индукционного редуктосина
Поскольку редуктосины часто используются в аналого-цифровых преобразователях, число зубцов ротора Z2 делают равным 2n (32, 64, 128). Соотношение Z1/Z2 может быть различным. В любом случае редуктосин состоит из определенного числа повторяющихся (элементарных) резольверов, равного наибольшему общему делителю Z1 и Z2.
Статор имеет три обмотки: одна первичная обмотка возбуждения В и две выходные синусная С и косинусная К. Катушки обмотки возбуждения размещены на каждом из зубцов, катушки выходных обмоток чередуются друг с другом. Выходные обмотки имеют дифференциальную схему соединения катушек, т.е. в каждой из пар катушки включены встречно по отношению к катушкам возбуждения. При протекании переменного тока по обмотке возбуждения создается поток, который наводит ЭДС взаимоиндукции во всех катушках выходных обмоток. ЭДС взаимоиндукции каждой катушки выходной обмотки определяется взаимоиндуктивностью с катушкой возбуждения, расположенной на том же зубце, взаимоиндуктивность в свою очередь определяется проводимостью воздушного зазора под зубцом. В редуктосине эта проводимость Λ является функцией угла поворота ротора Θ и имеет постоянную Λ0 и переменную Λпер составляющие; последняя изменяется с периодом 360°/Z2.
Существенным достоинством индукционных редуктосинов является высокая надежность благодаря отсутствию скользящих контактов. Однако уровень сигнала у них ниже, чем у классических многополюсных ВТ.
Индуктосины
Л инейный
индуктосин (рис. 4.14) состоит из набора
измерительных шкал 2 и ползуна 1,
монтируемых на станке. Измерительная
шкала 2, укрепленная на неподвижной
части 3 станка, представляет собой
стальную линейку длиной 250 мм и толщиной
порядка 10 мм, на которую на соответствующую
изолирующую подложку печатным способом
нанесена зигзагообразная обмотка в
виде полоски меди шириной около 1 мм с
шагом 2 мм. Число таких линеек выбирают
в зависимости от хода управляемого
элемента станка, и их стыкуют так, чтобы
они образовали одну измерительную шкалу
необходимой длины. Ползун 1, укрепленный
на подвижной части станка, является,
собственно, датчиком и содержит две
такие же, но значительно более короткие
обмотки, сдвинутые на 1/4 шага относительно
друг друга, поэтому напряжение в них
смещено на 900 (рис. 4.14,б). Зазор
между ползуном и линейкой равен 0,2-0,3
мм.
инейный
индуктосин (рис. 4.14) состоит из набора
измерительных шкал 2 и ползуна 1,
монтируемых на станке. Измерительная
шкала 2, укрепленная на неподвижной
части 3 станка, представляет собой
стальную линейку длиной 250 мм и толщиной
порядка 10 мм, на которую на соответствующую
изолирующую подложку печатным способом
нанесена зигзагообразная обмотка в
виде полоски меди шириной около 1 мм с
шагом 2 мм. Число таких линеек выбирают
в зависимости от хода управляемого
элемента станка, и их стыкуют так, чтобы
они образовали одну измерительную шкалу
необходимой длины. Ползун 1, укрепленный
на подвижной части станка, является,
собственно, датчиком и содержит две
такие же, но значительно более короткие
обмотки, сдвинутые на 1/4 шага относительно
друг друга, поэтому напряжение в них
смещено на 900 (рис. 4.14,б). Зазор
между ползуном и линейкой равен 0,2-0,3
мм.
Обмотки на ползуне являются статорными. Они питается переменным напряжением с частотой 4000 Гц. Обмотка на неподвижной линейке является роторной, с неё снимается сигнал синусоидального напряжения.
На обмотки ползуна подаются входные сигналы из устройства ЧПУ в виде синусоидальных напряжений. Выходной сигнал снимается с последовательно включенных обмоток линеек. Величина индукции в этих обмотках зависит от взаимного положения обмоток на ползуне и линейке. Таким образом, электрическая схема индуктосина совпадает со схемой вращающегося трансформатора.
При перемещении подвижного элемента в обмотке ротора происходит изменение сдвига фаз от максимума до минимума, которое преобразовывается в соответствующие импульсы управления и поступают на счётчик системы управления.
Индуктосин является циклическим измерительным устройством, так как он измеряет положение только в пределах своего шага (2 мм).
Индуктосин позволяет измерять линейные перемещения рабочего органа станка с большой точностью, примерно 0,4 мкм на длине 250 мм. Для измерения больших перемещений линейки стыкуют, что представляет определенную сложность. Для крупных станков используют гибкие ленточные индуктосины, у которых измерительная шкала выполняется в виде гибкой стальной ленты. Но они имеют меньшую точность.
К недостаткам линейных индуктосинов относится необходимость очень точной настройки взаимного расположения элементов датчика, особенно зазора между линейками, и чувствительность к загрязнению.
Поворотный индуктосин представляет собой многополюсный поворотный трансформатор с плоским, а не цилиндрическим воздушным зазором и печатными обмотками на статоре и роторе (рис. 4.15).
В корпусе 1 расположены два диска – статор 2 и ротор 3, выполненные из изоляционного материала: керамики, стекла или пластмассы. Диски расположены соосно, параллельно и удалены друг от друга на 0,1 мм. На торцевых поверхностях дисков, обращенных друг к другу, расположены печатные обмотки, выполненные методом фотолитографии. Точность их нанесения - 10``.
П роводящие
линии обмоток статора смещены на ½
полюсного деления ротора и образуют
две цени, питаемые напряжением, сдвинутым
по фазе на 900.
роводящие
линии обмоток статора смещены на ½
полюсного деления ротора и образуют
две цени, питаемые напряжением, сдвинутым
по фазе на 900.
На роторе рис. 4.15,б) обычно расположена однофазная обмотка возбуждения, у которой число проводников равно требуемому числу полюсов. Число пар полюсов в зависимости от области применения либо делают равным 2n (32-256), либо 180, 360.
Напряжение переменного тока подается на обмотку ротора через контактные кольца 5, укрепленные на валу 4, и щетки 6. На статоре расположены две многополюсные обмотки, сдвинутые на электрический угол 90°, – синусная и косинусная.
При подаче переменного напряжения на обмотку возбуждения по ней течет ток и создается магнитный поток Ф, который наводит ЭДС взаимоиндукции в выходных обмотках статора. При повороте ротора изменяется взаимоиндуктивность обмоток статора и ротора и соответственно наводимые в обмотках статора ЭДС. При соответствующем выборе ширины проводников, их скоса и шага катушек взаимоиндуктивность будет изменяться по гармоническому закону.
Достоинствами индуктосинов являются простота конструкции, высокая технологичность и точность изготовления обмоток методами фотолитографии, отсутствие влияния нестабильности характеристик ферромагнитных материалов. У современных индуктосинов асимметрия нулевых положений не превышает 1–3 угловых секунд.
Недостатком индуктосинов является низкий уровень выходного сигнала- порядка 10–20 мВ. Уровень выходного сигнала может быть повышен за счет частоты f, поэтому современные индуктосины работают на частотах до 10–100 кГц.