

3.7. Закон количества движения
Общие законы динамики материальной точки устанавливают зависимость между изменением динамических мер движения материальной точки и мерами действия сил, приложенных к этой точке.
Количеством движения материальной точки называется вектор, равный произведению массы точки на ее скорость и имеющий направление скорости, т.е.
q =mV .
Единица измерения количества движения: кг * м /с
Количество движения можно спроектировать на координатные оси, т.е.
qx=mVx qy=mVy; qz=mVz.
Импульсом постоянной силы называется вектор, равный произведению силы на время ее действия и имеющий направление силы, т.е. S = P (t 2 – t 1)
где t 2 и t1 - конечный и начальный моменты времени.
Единица измерения импульса силы: кг * м /c
т.е. импульс силы измеряется в тех же единицах, что и количество движения. Закон изменения количества движения формулируется так: изменение количества движения материальной точки за некоторый промежуток времени равно импульсу приложенной к ней силы за тот же промежуток времени.
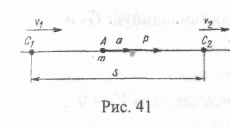
При прямолинейном движении точки А (рис. 41) под действием постоянной силы, согласно основному закону динамики, ускорение точки есть величина постоянная и она движется равнопеременно. Скорость точки А в произвольный момент времени определяется по
 формуле
равнопеременного
движения, т.е.
формуле
равнопеременного
движения, т.е.
V2 = V 1 + at.
Умножив обе части основного закона динамики на время t = t2 - t1, получим
Pt = mat.
Выразив из формулы равнопеременного движения at - V2 - V1 и подставив его в последнюю формулу, получим
Pt = m(V2 -Vi) = mV2 - mV1
Исходя из того, что произведение Р-t является импульсом силы S = Pt, окончательно имеем
S=mV2 - mV1
Если к материальной точке приложено несколько постоянных сил, то изменение количества движения будет равно сумме (алгебраической, если силы действуют по одной прямой или векторной, если силы действуют под углом друг к другу) импульсов данных сил, т.е.
mV2 - mV1 = Σ (P 1 * t).
3.9. Моменты инерции некоторых однородных тел
Моменты инерции для некоторых однородных тел имеют следующие выражения, приведенные без выводов.
1. Однородный стержень относительно оси, перпендикулярной оси стержня и проходящей через его конец (рис. а):
Iy = m l 2 / 2 ,
где т-масса стержня;
l –длина стержня
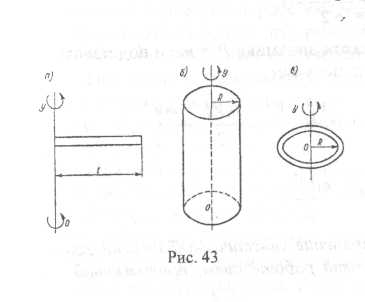
2. Однородный стержень относительно оси, проходящий через центр тяжести:
Iс = m l 2 / 12 ,
3. Однородный цилиндр : Iy = m D2 / 8 ,
где D - диаметр цилиндра.
Окружность или тонкое кольцо, если пренебречь его толщиной (рис. в):
Iy = m D2 / 4 ,
Пример 7. Определить силу, действующую на тело массой т = 1,5 кг, движение которого выражается уравнениями: х = Δt; у = 2 + t - 6г2 (х и у - в сантиметрах, t - в секундах).
Решение. Задано движение тела, поэтому данный пример относится к первой задаче динамики.
1. Определяем проекции ускорения на координатные оси:
ax= d 2x / dt2 = d 2 (Δt) / dt2= 0
a y= d 2y / dt2 = d 2 (2 +t -- 6t 2) / dt2= - 0.12 м / с 2
2. Подставляя эти значения в уравнения движения материальной точки, получим проекции сил Рх и Ру, т.е.
Рх = т а х = 0; Ру = т а у =1.5 (- 0.12)= - 0.18 кг*м / с 2 =- 0.18 Н.
3. Модуль силы Р равен: Р = √Р,2 + Ру2 = √0 + (- 0,18)2 = 0,18 Н.
4. По проекциям видно, что она параллельна оси у (так как х = 0) и направлена в сторону, противоположную оси у (так как сила Ру отрицательна).
Пример 8. На материальную точку массой т = 10Н, лежащую на гладкой горизонтальной поверхности, действует горизонтальная сила Р = 20 Н. Определить скорость движения точки через время t — 10 с, если точка начала двигаться из состояния покоя.
Решение. Так как заданы силы, пример относится ко второй задаче динамики.
1. Так как точка лежит на гладкой горизонтальной поверхности, то под действием силы Р точка будет двигаться равноускоренно. Направив ось х вдоль траектории точки, запишем уравнение движения и найдем ускорение:
Рх = тах = та, откуда а = Рх // т = Р / т =20 / 10 = 2 Н.
2. При равноускоренном движении скорость будет
V = V0+at = 0 + 2*10 = 20 м/с.
Пример 9. В поднимающейся кабине лифта взвешивается тело на пружинных весах. Сила тяжести тела G - 150 Н, натяжение пружины весов, равное весу тела, R= 165 Н.
Определить ускорение кабины.
Решение. 1. Применяя к телу принцип освобождаемости, пружинные весы заменим реакцией R, равной натяжению пружины.
Применяя метод кинетостатики, приложим к телу силу инерции Ри
Составим уравнение равновесия взвешиваемого тела, проектируя все силы на ось у, предполагая, что ускорение кабины а направлено вверх и, следовательно, сила инерции направлена вниз, т.е.
ΣP ix = 0 . R-G-Pu = 0
4. Определяем модуль силы инерции по формуле:
РИ =т-а = G а / g.
5. Подставив это выражение в уравнение равновесия, определяем ускорение.
а = g (R - G) / G= 9.81(165-150) / 150= 0.981 m /c 2
6. Так как ускорение получилось положительным, как и предполагалось, оно направлено вверх.
Пример 10. Груз силой тяжести G = 25 Н подвешен на нити длиной / = 0,7 м в неподвижной точке О. Нить отклонена от вертикали на угол а = 50° и описывает окружность в горизонтальной плоскости. Определить скорость груза V и натяжение нити R.
Решение.1.Поскольку отклонение нити составляет постоянную величину, то скорость груза постоянна, поэтому касательное ускорение а, = 0 и касательная сила инерции Р'И = 0.
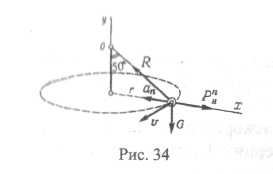
2. Применяя принцип Даламбера, приложим к грузу силу инерции Рu, реакцию нити R и составим уравнение равновесия относительно выбранных осей х и у , т.е.
Σ Pix= 0 -R sin a + Р"и =0
Σ Piy= 0 R= cos a – G = 0
3. Сила инерции запишется в следующем виде:
Р"и= man = G V 2 /gr =
G V 2 /gl sin a
4. Из второго уравнения равновесия находим натяжение нити
R= - G / cos a = 25 / 0.643 = 38,8 Н.
5. Подставляем выражение R в первое уравнение равновесия
- G sin a / cos a + G V 2 /gl sin a = 0
откуда находим скорость груза V
V=√ gl sin a / cos a =√ [9.81 * 0.7 *(0.766)2 / 0.643 = 25 м/с.
Работа силы на криволинейном участке пути. На криволинейном участке пользуются понятием элементарной работы на элементарном участке пути AS (рис. 36), который можно считать прямолинейным, т.е.
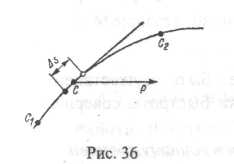
где V - скорость точки, совпадающая по направлению с элементарным перемещением.
Работа на конечном отрезке пути С1С2 равна сумме элементарных работ: А = Σ PΔScos(P,V),
Данную формулу можно использовать для определения работы силы тяжести. Пусть некоторая точка, имеющая силу тяжести G, переместилась по криволинейной траектории из точки С1 в точку С2, опустившись на некоторую высоту Н. (рис. 37).
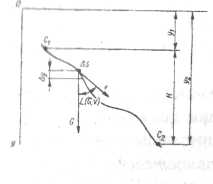
Выражение AScos(Gy) = Ay представляет собой проекцию элементарного участка пути AS на ' направление силы тяжести G, т.е.
ΔScos(G,V) = Δy.
Элементарная работа силы тяжести G на пути AS равна ΔA = GΔScos(G,V).
Рис.37
Тогда полная работа, равная сумме элементарных работ будет равна А =Σ GΔу
Так как сила тяжести G есть величина постоянная и учитывая, что сумма элементарных участков по оси у равна полной высоте перемещения тела ΣΔу= Н получаем
А = GΣΔу = GH, т.е. А = GH.
Таким образом, работа силы тяжести тела равна произведению его силы тяжести на вертикальное перемещение ее точки приложения. Из формулы видно, что работа силы тяжести тела не зависит от траектории перемещения его центра тяжести