

97. Следующая формула определяет

А. Период свободных колебаний
Б. Период вынужденных колебаний
В. Период импульсивной нагрузки
Г. Период гармонической нагрузки
98. Следующее дифференциальное уравнение определяет
![]()
А. Изгиб стержня в плоскости (xz) от действия поперечной нагрузки qx
Б. Изгиб стержня в плоскости (xу) от действия поперечной нагрузки qx
В. Изгиб стержня в плоскости (уz) от действия поперечной нагрузки qx
Г. Кручение стержня
99. Величина ζ в уравнении означает
А. Нормальное смещение в направлении оси х
Б. Нормальное смещение в направлении оси у
В. Продольное смещение
Г. Касательное смещение
100. В левой части формулы представлена

А. Частота свободных колебаний системы с одной степенью свободы
Б. частота вынужденных колебаний системы с одной степенью свободы
В. Амплитуда колебаний
Г. Фаза колебаний
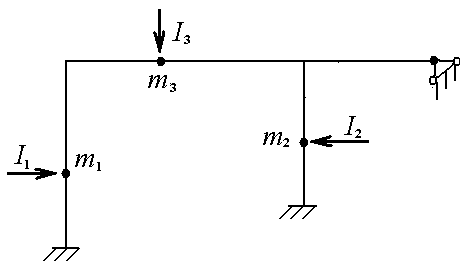
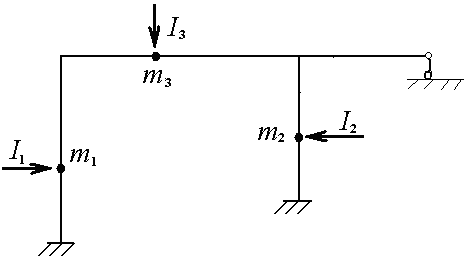
101. Для указанной невесомой рамы с одной сосредоточенной массой количество частот собственных колебаний равно
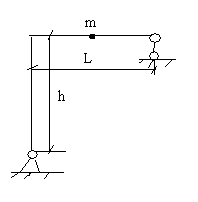
А. 2
Б. 3
В. 1
Г. 4
102. Следующее уравнение описывает деформацию
А. Изгиб
Б. Растяжение
В. Сдвиг
Г. Кручение
103. В уравнении правая часть представляет
А. Интенсивность нормальной нагрузки при изгибе
Б. Интенсивность касательных сил
В. Интенсивность нормальной нагрузки при внецентренном сжатии
Г. Интенсивность нагрузки при сложном сопротивлении
104. В уравнении правая часть представляет
![]()
А. Интенсивность нормальной нагрузки при изгибе
Б. Интенсивность касательных сил
В. Интенсивность нормальной нагрузки при внецентренном сжатии
Г. Интенсивность нагрузки при сложном сопротивлении
105. Уравнение
представляет собой
А. Уравнение поперечного изгиба в плоскости (уz)
Б. уравнение сдвига
В. Уравнение кручения
Г. Уравнение центрального сжатия
106. Уравнение представляет собой
![]()
А. Изгибно-крутильные деформации тонкостенного стержня
Б. Чистое кручение
В. Чистый сдвиг
Г. Чистый изгиб
107. Правая часть уравнения представляет
.
А. Интенсивность внешних крутящих моментов
Б. Интенсивность поперечной нагрузки
В. Интенсивность изгибающих моментов
Г. Сосредоточенный момент
108.Величина θ в левой части уравнения представляет
А. Угол поворота при изгибно-крутильных деформациях
Б. Угол поворота при чистом кручении
В. Угол поворота сечения при изгибе
Г. Угол сдвига
109.Величина Iω означает в уравнении
А. Секториальный момент инерции сечения
Б.Момент инерции сечения
В. Полярный момент инерции
Г. Статический момент сечения
110 Величина GId представляет в уравнении
А. Жесткость при чистом кручении
Б. Жесткость при изгибе
В. Жесткость при сдвиге
Г. Жесткость при растяжении
111 Уравнение описывает
![]()
А. деформацию растяжения при действии распределенной продольной силы интенсивности qz
Б. Деформацию изгиба
В.Деформацию сдвига
Г.Деформацию кручения
112. В левой части уравнения величина ЕА означает
А. Жесткость при растяжении-сжатии
Б. Жесткости при изгибе
В. Жесткость при сдвиге
Г. Жесткость при кручении
113. В левой части уравнения величина ζ представляет собой
А. Смещение вдоль продольной оси стержня
Б. Прогиб
В. Угол поворота
Г. Смещение по нормали к оси стержня
114. Уравнение представляет собой
![]()
А. равновесие стержня, находящегося под действием внецентренно приложенной продольной нагрузки интенсивности qz и поперечной нагрузки интенсивности qх
Б. Изгибно-крутильные деформации
В. Внецентренное сжатие
Г. Кручение
115. В левой части величина еу означает
А. Эксцентриситет продольной нагрузки qz
Б.Координату центра изгиба
В. Координату центра тяжести
Г. Прогиб
116. Уравнение представляет собой
![]()
А. равновесие стержня, находящегося под действием внецентренно приложенной продольной нагрузки интенсивности qz и поперечной нагрузки интенсивности qу
Б. Изгибно-крутильные деформации
В. Внеценренное сжатие
Г. Кручение
117. В левой части величина ех означает
А. Эксцентриситет продольной нагрузки qz
Б.Координату центра изгиба
В. Координату центра тяжести
Г. Прогиб
118. Какое движение описывает следующее дифференциальное уравнение:

А. Вынужденное колебание упругой системы с одной степенью свободы без учета сил сопротивления
Б. Свободное колебание упругой системы с одной степенью свободы
В. Свободное колебание упругой системы с одной степенью свободы без учета сил сопротивления
Г. Свободное колебание упругой системы с одной степенью свободы с учетом сил сопротивления
119. Какое движение описывает следующее дифференциальное уравнение:

А. Вынужденное колебание упругой системы с одной степенью свободы с учетом сил сопротивления
Б. Вынужденное колебание системы с одной степенью свободы без учета сил сопротивления
В. Свободное колебание упругой системы с одной степенью свободы без учета сил сопротивления
Г. Свободное колебание упругой системы с одной степенью свободы с учетом сил сопротивления
120. Какое движение описывает следующее дифференциальное уравнение:

А. Свободное колебание упругой системы с одной степенью свободы с учетом сил сопротивления
Б. Свободное колебание упругой системы с одной степенью свободы без учета сил сопротивления
В. Вынужденное колебание упругой системы с двумя степенями свободы
Г. Вынужденное колебание упругой системы с одной степенью свободы.
121. Какое движение описывает следующее дифференциальное уравнение:

А. Свободное колебание упругой системы с одной степенью свободы без учета сил сопротивления
Б. Вынужденное колебание упругой системы с двумя степенями свободы
В. Вынужденное колебание упругой системы с одной степенью свободы
Г. Свободное колебание упругой системы с одной степенью свободы с учетом сил сопротивления
122. Сколько собственных форм колебаний имеет система с n степенями свободы.
А. n форм
Б. n+1 форм
В. n+2 форм
Г. n-1 форм
123. Вековое уравнение для определения собственных частот для системы с n степенями свободы представляет нелинейное уравнение. Какой порядок этого уравнения?
А. n
Б. n+1
В. n+2
Г. n-1
124. Каким свойством обладают собственные формы колебаний?
А. Ортогональности.
Б. Взаимности
В. Пропорциональности
Г. Линейности
125. От чего зависят собственные частоты?
А. От геометрических, физических свойств, условий закрепления системы
Б. Только от физических и геометрических свойств
В. Только от условий закрепления
Г. Только от механических свойств
126 . Критическая нагрузка для сжатого стержня имеет вид:
Наиболее опасная критическая нагрузка, соответствует какому значению n?
А. 1
Б. 2,5
В. 3
Г. 0,5
127. Как изучают деформирование тела при энергетическом методе исследования деформаций?
А. Рассматривается весь процесс деформирования
Б. Рассматривается отдельно взятый этап деформирования
В. Рассматриваются часть процесса деформирования
Г. Рассматривается конечный момент деформирования
128. Что означает коэффициент при второй производной от перемещения в уравнении движения: ?
А. Сосредоточенную массу
Б. Распределенную массу
В. Эквивалентную массу
Г. Интенсивность распределенной массы
129. . Что означает коэффициент при первой производной от перемещения в уравнении движения: ?
А.Коэффициент сил сопротивления
Б. Распределенную массу
В. Эквивалентную массу
Г. Интенсивность распределенной массы
130. Что означает коэффициент «с» в уравнении движения: ?
А. Жесткость системы, т.е. сила, вызывающая единичное перемещение массы в направлении движения
Б. Распределенную массу
В. Эквивалентную массу
Г. Интенсивность распределенной массы
131. Что представляет функция в правой части уравнения движения:
А.Внешнюю нагрузку
Б. Распределенную массу
В. Эквивалентную массу
Г. Интенсивность распределенной массы
132. В устойчивом равновесном состоянии значение полной потенциальной энергия деформации соответствует
А. Минимумe
Б.. Максимуму
В. Нулю.
Г. Больше нуля
133. Сколько форм потери устойчивости имеет упругая система?
А. Бесконечное множество
Б. Конечное количество
В. Одну
Г. Две
134. Какие виды деформаций учитывают при рассмотрении устойчивости сжатых составных стержней?
А. Сдвиг
Б. Кручение
В. Чистый изгиб
Г. Сжатие
135.К каким уравнениям сводится определение критических нагрузок для сжатой плоской рамы?
А. Трансцендентным
Б. Нелинейным алгебраическим
В. Дифференциальным
Г. Интегральным
136. Что представляет первое слагаемое в левой части уравнения движения:
А. Силы инерции
Б. Упругие силы
В. Силы сопротивления
Г. Внешние возмущающие силы.
137. Что представляет второе слагаемое в левой части уравнения движения:
А. Силы сопротивления
Б. . Внешние возмущающие силы
В. Внутренние силы
Г. Упругие силы
138. Что представляет третье слагаемое в левой части уравнения движения:
.
А. Упругие силы
Б. Инерционные силы
В. Силы сопротивления
Г. Внешние возмущающие силы
139. Второй закон Ньютона связывает
А. Массу с ускорением
Б. Упругие силы и силы инерции
В. Силы сопротивления и силы инерции
Г. Внешние возмущающие силы
140. Что представляет собой динамический коэффициент μ?
А. Отношение наибольшего динамического прогиба или напряжения к их статическим значениям
Б. Разность между наибольшим динамическим прогибом и статическим.
В. Сумма динамического и статического прогиба.
Г. Произведение динамического и статического прогиба.
141. Что представляет собой резонанс?
А. Совпадение собственной частоты системы с частотой внешних сил
Б. Когда отношение собственных частот к частоте внешних сил больше единицы
В. Когда отношение собственных частот к частоте внешних сил меньше единицы
Г. Когда отношение собственных частот к частоте внешних сил равно нулю
142. Чему равен динамический коэффициент для системы с одной степенью свободы без учета сил сопротивления при резонансе?
А. Бесконечности
Б. 1
В. 2
Г. 0
143. Сколько главных форм колебаний имеет система с одной степенью свободы?
А. 1
Б. 2
В. 3
Г. Бесконечное множество
144. Сколько главных форм колебаний имеет система с двумя степенью свободы?
А. 2
Б. 1
В. 3
Г. Бесконечное множество
145. Сколько главных форм колебаний имеет система с тремя степенью свободы?
А. 3
Б. 2
В. 4
Г. Бесконечное множество
146. Сколько главных форм колебаний имеет система с бесконечной степенью свободы?
А. Бесконечное множество
Б. 1
В. 2
Г. 3
147. Сколько степеней свободы имеет брус с распределенной массой?
А. Бесконечное множество
Б. 1
В. 2
Г. 3
148. Сколько собственных частот и форм собственных колебаний имеет рама с 3 степенями свободы?
А. Три
Б. Одну
В.Четыре
Г. Пять
149. Сколько собственных частот и форм собственных колебаний имеет рама с 5 степенями свободы?
А. 5
Б. 2
В. 3
Г. Бесконечное множество
150. Какие собственные частоты в спектре частот являются наиболее опасными?
А. Наименьшие
Б. Наибольшие
В. Больше единицы
Г. Меньше единицы
151. Какие критические нагрузки являются наиболее опасными?
А. Наименьшие
Б. Наибольшие
В. Больше единицы
Г. Меньше единицы
152. Какие стержни рассматриваются в задаче Эйлера?
А. Сжатые
Б.Растянутые
В. Изогнутые
Г. Скрученные
153. Что понимают в динамике под числом степеней свободы?
А. Число независимых геометрических параметров, определяющих положение системы в любой момент времени при любом ее движении
Б. Общее число геометрических параметров, определяющих положение системы при любом ее движении
В. Число независимых геометрических параметров, определяющих положение системы в какой-то определенный момент времени
Г. Общее число геометрических и физических параметров, определяющих положение системы в любой момент времени при любом ее движении
154. Для системы с конечным числом масс, что означает степень свободы?
А. Количество независимых геометрических параметров, характеризующие положения всех масс в любой момент времени при любом ее движении
Б. Общее число геометрических параметров, определяющих положение масс при любом ее движении
В. Число независимых геометрических параметров, определяющих положение масс в какой-то определенный момент времени
Г. Общее число геометрических и физических параметров, определяющих положение масс в любой момент времени при любом ее движении
155. Вековое уравнение для системы с конечным числом степеней свободы имеет вид:
величина ω означает
А. Частоту собственных колебаний
Б. Частота вынужденных колебаний
В. Параметр внешней нагрузки
Г. Физический параметр системы
156. Вековое уравнение для системы с конечным числом степеней свободы имеет вид:
Что означает величина δij?
А. Перемещения от единичных значений инерционных сил
Б. Перемещения от единичных внешних сил
В. Физические параметры
Г. Геометрические параметры
157. Что представляет собой вековое уравнение для системы с «n» степенями свободы?
А. Нелинейное алгебраическое уравнение «n» порядка относительно частоты собственных колебаний системы
Б. Линейное алгебраическое уравнение «n» порядка относительно частоты собственных колебаний системы
В. Нелинейное дифференциальное уравнение «n» порядка относительно частоты собственных колебаний системы
Г. Линейное дифференциальное уравнение «n» порядка относительно частоты собственных колебаний системы
158. Что представляет собой спектр частот?
А. Совокупность всех частот собственных колебаний системы, расположенных по возрастанию их численных значений
Б. Диапазон низких частот
В. Диапазон высоких частот
Г. Усредненные частоты
159. Нагрузка вида P(t)=Psin θt называется
А. Гармонической или периодической
Б. Импульсивной
В. Постоянной
Г. Ударной
160.Левая часть выражает
А.сдвиг фазы вынужденных колебаний по отношению к колебаниям возмущающей силы
Б. Период колебаний
В. Частоту
Г. Амплитуду колебаний
161. Что означают в левой части уравнения величины уio (i=1,2….n)

А. Амплитуды собственных колебаний системы с конечным числом степеней свободы
Б. Амплитуды вынужденных колебаний системы с конечным числом степеней свободы
В. Амплитуды собственных колебаний системы с бесконечным числом степеней свободы
Г. Амплитуды вынужденных колебаний системы с бесконечным числом степеней свободы
162. Что означают в левой части уравнения величина ω
А. Частоту собственных колебаний системы с конечным числом степеней свободы
Б. Амплитуды вынужденных колебаний системы с конечным числом степеней свободы
В. Амплитуды собственных колебаний системы с бесконечным числом степеней свободы
Г. Амплитуды вынужденных колебаний системы с бесконечным числом степеней свободы
163. Что означают в левой части уравнения величины mi (i=1,2….n)
А. Сосредоточенные массы
Б.Сосредоточенные моменты
В. Распределенные массы
Г. Распределенные моменты
164. Формула означает

А. Частоты собственных колебаний для системы с двумя степенями свободы
Б. Частоты вынужденных колебаний для системы с двумя степенями свободы
В. Частоты собственных колебаний для системы с тремя степенями свободы
Г. Частоты вынужденных колебаний для системы с тремя степенями свободы
1 65.
Уравнение означает
65.
Уравнение означает
А. Ортогональность собственных форм колебаний для системы с двумя степенями свободы
Б. Ортогональность собственных форм колебаний для системы с 3 степенями свободы
В. Ортогональность собственных форм колебаний для системы с 4степенями свободы
Г. Ортогональность собственных форм колебаний для системы с 5 степенями свободы
166. Сколько собственных частот имеет система с сосредоточенными массами
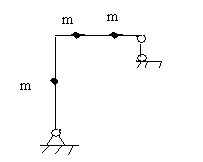
А. 4
Б. 2
В. 3
Г. 5
167. Сколько собственных частот имеет система с сосредоточенными массами
А.3
Б.2
В.1
Г. 4
168. Сколько собственных форм колебаний имеет система с сосредоточенными массами
А.4
Б.2
В.1
Г. 3
169.В левой части Zi означают
А. Амплитудные значения инерционных сил
Б. Перемещения
В. Реакции
Г. Напряжения
170. Правая часть уравнения представляет собой
А. Внешнюю нагрузку
Б. Статическую нагрузку
В. Реакции
Г. Внутренние усилия
171. Дифференциальное уравнение свободных колебаний без учета сил сопротивления имеет вид:
 ,
,
где m(x) представляет
А. Погонную массу стержня
Б. погонный момент
В. Момент инерции сечения
Г. крутящий момент
172. В первом приближении круговая частота собственных колебаний системы, загруженной сосредоточенными и распределенными массами, может быть определена по формуле:
 ,
,
где ωi
А. круговая частота собственных колебаний системы, в предположении ее загружения только одной сосредоточенной массой
Б. круговая частота собственных колебаний системы, в предположении ее загружения двумя сосредоточенными массами
В. круговая частота вынужденных колебаний системы
Г.круговая частота собственных колебаний системы, в предположении ее загружения только n сосредоточенными массами
173. Приближенное значение ω0 можно определить по формуле:
 ,
,
где δii - прогиб в i –ом сечении от единичной сосредоточенной силы, приложенной в этом сечении, где m(x) представляет
А. Погонную массу стержня
Б. погонный момент
В. Момент инерции сечения
Г. крутящий момент
174. Формула Рэлея определяет
А. частоту свободных колебания для системы с сосредоточенными и распределенными массами
Б. частоту свободных колебания для системы с распределенными массами
В. частоту свободных колебания для системы с сосредоточенными массами
Г. амплитуду свободных колебания для системы с сосредоточенными и распределенными массами
175. Дифференциальное уравнение поперечных колебаний для нагрузки
А. Периодической
Б. Импульсивной
В. Ударной
Г. Постоянной
176. Формула справедлива
А. Для тонкостенных стержней
Б. Для тонких плит
В. Для стержней сплошного поперечного сечения
Г. Для толстых плит
177. Динамика сооружений разрабатывает
А. Принципы и методы расчета сооружений на действие динамических нагрузок
Б. Принципы и методы расчета сооружений на действие импульсивных нагрузок
В.Расчет по несущей способности
Г. Расчет по устойчивости
178. Импульсивные нагрузки характеризуются
А. Небольшой продолжительностью и зависят от упругих и инерционных свойств конструкции
Б. Небольшой продолжительностью и не зависят от упругих и инерционных свойств конструкции
В. Небольшой продолжительностью и зависят только от упругих свойств конструкции
Г. Большой продолжительностью и зависят от упругих и инерционных свойств конструкции
179. Случайные нагрузки содержат
А. Элементы неопределенности относительно величины и момента воздействия
Б. Элементы неопределенности относительно величины воздействия
В. Элементы неопределенности относительно момента воздействия
Г. Неопределенность относительно времени воздействия
180. Колебания представляют процесс
А. поочередного возрастания или убывания во времени какой-либо величины
Б. Изменения положения системы во времени
В. Изменения внутренних усилий во времени
Г. Изменения деформаций во времени
181. Вибрации механической системы представляют
А. колебания с относительно небольшой амплитудой и с небольшим значением низких частот
Б. колебания с относительно небольшой амплитудой
В. колебания с небольшим значением низких частот
Г. колебания с высокими частотами
182. Механические колебания характеризуются
А. колебаниями одной или нескольких обобщенных координат или их скоростей
Б. колебаниями нескольких обобщенных координат или их скоростей
В. колебаниями одной из координат
Г. колебаниями одной из скоростей
183. Гармонические колебания совершаются
А. по закону синуса или косинуса
В. По закону тангенса
Б. по параболическому закону
Г. По квадратичному закону
184.Частота колебаний равна
А. числу полных колебаний в единицу времени
Б. амплитуде колебаний
В. сдвигу фаз колебаний
Г. числу колебаний в указанный момент времени
185. Степень свободы динамической системы равна
А. числу независимых параметров, определяющих положение всех масс при любых возможных перемещениях системы в любой момент времени
Б. числу независимых параметров, определяющих положение всех масс в определенный момент времени
В. числу зависимых параметров, определяющих положение всех масс при любых возможных перемещениях системы
Г. числу независимых параметров, определяющих положение нескольких масс при любых возможных перемещениях системы в любой момент времени
186. Явление резонанс появляется при
А. равенстве частот свободных и вынужденных колебаний
Б. равенстве перемещений свободных и вынужденных колебаний
В. равенстве внутренних усилий свободных и вынужденных колебаний
Г. равенстве амплитуд свободных и вынужденных колебаний
187. Явление резонанс сопровождается
А. резким возрастанием амплитуды вынужденных колебаний по отношению к статическим перемещениям и усилиям
Б. постоянством амплитуды вынужденных колебаний
В. затуханием амплитуды вынужденных колебаний
Г. уменьшением коэффициента динамичности
188. Принцип Даламбера характеризуется тем, что
А. Динамическое равновесие можно рассматривать как статическое, если к статическим внешним силам, внутренним усилиям и реакциям добавить силы инерции
Б. Динамическое равновесие можно рассматривать как статическое, если к статическим внешним силам и реакциям добавить силы инерции
В. Динамическое равновесие можно рассматривать как статическое, если к статическим внутренним усилиям и реакциям добавить силы инерции
Г. Динамическое равновесие можно рассматривать как статическое, если к статическим внешним силам добавить силы инерции
189. Коэффициент динамичности характеризует отношение
А. максимального динамического перемещения к статическому
Б. среднего значения динамического перемещения к статическому
В. минимального значения динамического перемещения к статическому
Г. частот вынужденных колебаний к собственным
190. Дифференциальное уравнение представляет
А. уравнение свободных поперечных колебаний балки с распределенной массой без учета сил сопротивления
Б. уравнение вынужденных поперечных колебаний балки с распределенной массой без учета сил сопротивления
В. уравнение свободных продольных колебаний стержня с распределенной массой без учета сил сопротивления
Г. уравнение вынужденных продольных колебаний стержня с распределенной массой без учета сил сопротивления
191. Левая часть представляет

где

А. k-ую форму собственных поперечных колебаний стержня с равномерно-распределенной массой без учета сил сопротивления
Б. k-ую форму собственных продольных колебаний стержня с равномерно-распределенной массой без учета сил сопротивления
В. k-ую форму собственных поперечных колебаний стержня с равномерно-распределенной массой с учетом сил сопротивления
Г. форму вынужденных поперечных колебаний стержня с равномерно-распределенной массой без учета сил сопротивления
192. Следующие формулы определяют
где .
А. главные формы колебаний и соответствующие производные для стержня с равномерно распределенной массой
Б. главные формы колебаний и соответствующие производные для стержня с сосредоточенными массами
В.вынужденные формы колебаний и соответствующие производные для стержня с равномерно распределенной массой
Г. вынужденные формы колебаний и соответствующие производные для стержня с сосредоточенными массами
193. Перемещения в упругой системе можно определять по следующей формуле:

Перемещения от каких деформаций выражает первая сумма?
А. От изгиба
Б. От растяжения
В. От сжатия с изгибом
Г. От сдвига
194. Перемещения в упругой системе можно определять по следующей формуле:
Перемещения от каких деформаций выражает вторая сумма?
А. От растяжения - сжатия
Б. От изгиба
В. От растяжения с изгибом
Г. От сдвига
195. Перемещения в упругой системе можно определять по следующей формуле:
Перемещения от каких деформаций выражает третья сумма?
А.. От сдвига
Б. От растяжения - сжатия
В. От изгиба
Г. От растяжения с изгибом
196. Перемещения в упругой системе можно определять по следующей формуле:
Что
означает величина
 в числителе первой суммы?
в числителе первой суммы?
А. Изгибающий момент от единичного усилия, приложенного в интересующем направлении k
Б. Изгибающий момент от заданной внешней нагрузки в сечении k
В Изгибающий момент от единичного усилия и внешней нагрузки в сечении k
Г. Изгибающий момент от сосредоточенных сил в сечении k
197. Перемещения в упругой системе можно определять по следующей формуле:
Что означает величина Mf в правой части первой суммы?
А. Изгибающий момент от заданной внешней нагрузки
Б. Изгибающий момент от единичного усилия, приложенного в интересующем направлении k
В. Изгибающий момент от единичного усилия и внешней нагрузки
Г. Изгибающий момент от сосредоточенных сил
198. Перемещения в упругой системе можно определять по следующей формуле:
Что
означает величина
 в числителе второй суммы?
в числителе второй суммы?
А. Продольную силу от единичного усилия, приложенного в интересующем направлении k
Б. Продольную силу от заданной внешней нагрузки в сечении k
В. Продольную силу от единичного усилия и внешней нагрузки
Г. Продольную силу от сосредоточенных сил в сечении k
199. Перемещения в упругой системе можно определять по следующей формуле:
Что означает величина Nf в числителе второй суммы?
А. Продольную силу от заданной внешней нагрузки
Б. Продольную силу от единичного усилия, приложенного в интересующем направлении k
В. Продольную силу от единичного усилия и внешней нагрузки
Г. Продольную силу от сосредоточенных сил
200. Перемещения в упругой системе можно определять по следующей формуле:
Что
означает величина
 в числителе третьей суммы?
в числителе третьей суммы?
А. Поперечную силу от единичного усилия, приложенного в интересующем направлении k
Б. Поперечную силу от заданной внешней нагрузки
В. Поперечную силу от внешней нагрузки и единичного усилия
Г. Поперечную силу только от сосредоточенных сил
201. Перемещения в упругой системе можно определять по следующей формуле:
Что означает величина Qf в числителе третьей суммы?
А. Поперечную силу от заданной внешней нагрузки
Б. Поперечную силу от единичного усилия, приложенного в интересующем направлении k
В. Поперечную силу от внешней нагрузки и единичного усилия
Г. Поперечную силу только от сосредоточенных сил