

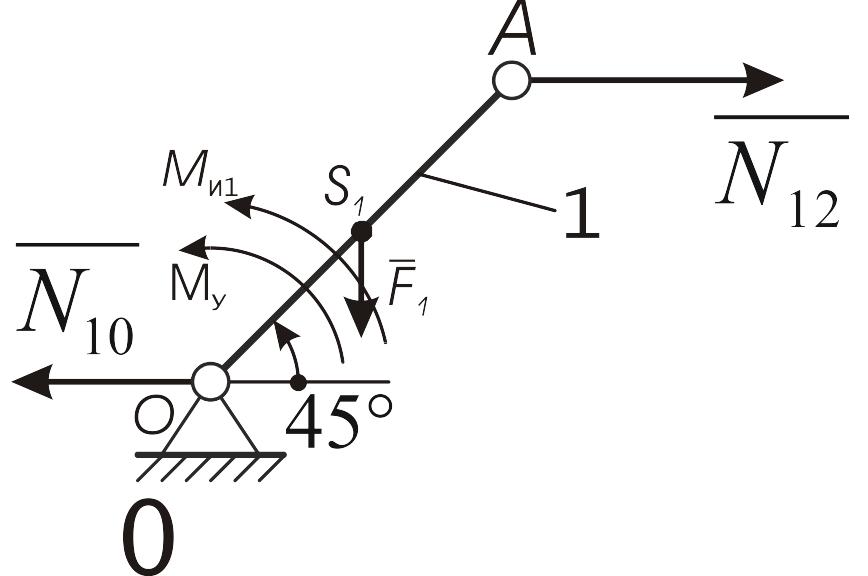
4.2 Силовой анализ элементарного механизма и определение уравновешивающего момента
 Рисуем
элементарный механизм, прикладываем
все известные силы и моменты, учитывая,
что
Рисуем
элементарный механизм, прикладываем
все известные силы и моменты, учитывая,
что
![]() (рис. 18).
(рис. 18).
Рис. 18. Силовой анализ элементарного механизма.
Записываем условие равновесия для звена 1:
![]() ,
(77)
,
(77)
Подставив значения в (77), получим:
![]()
![]()
Находим реакцию в КП А. Для этого размыкаем ее со стойкой и заменяем реакцией. Записываем уравнение равновесия 1-го звена:
![]() . (78)
. (78)
Из-за
относительной малости мы можем пренебречь
величиной
![]() ,
получим, что
,
получим, что
![]() .
А по модулю
.
А по модулю
![]() .
Наносим полученное значение на чертеж
(рис. 18).
.
Наносим полученное значение на чертеж
(рис. 18).
4.3 Определение уравновешивающего момента методом рычага жуковского
Теорема Н. Е. Жуковского применяется при решении многих задач динамики машин. В частности, она используется для определения уравновешивающего момента (уравновешивающей силы), если нет необходимости в последовательном определении реакций в кинематических парах механизма.
Теорема Жуковского гласит: «Если силу, приложенную к какой-либо точке звена механизма, перенести параллельно самой себе в одноименную точку повернутого плана скоростей, то момент этой силы относительно полюса плана скоростей будет пропорционален ее мощности».
Определим
уравновешивающий момент, используя
данную теорему. Строим повернутый на
90º план скоростей механизма, к которому
в соответствующих точках прикладываем
заданные силы и силы инерции, сохраняя
их истинные направления (рис. 19). Масштабный
коэффициент
![]() .
.
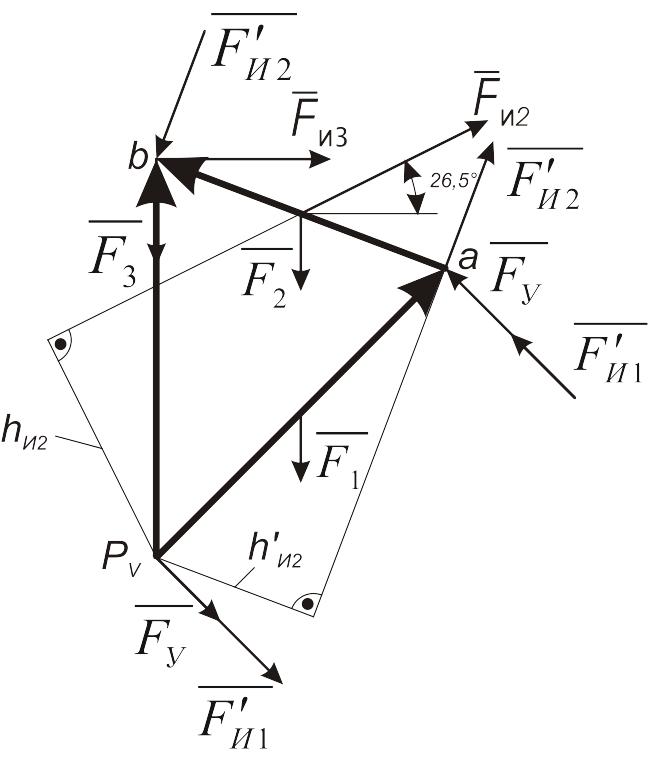 Рис.
19. Рычаг Н. Е. Жуковского.
Рис.
19. Рычаг Н. Е. Жуковского.
Моменты
инерции Ми1
и Ми2
заменяем парами сил
![]() и
и
![]() соответственно, которые прикладываем
перпендикулярно отрезкам OA
и AB
в кинематических парах O,
A
и B.
Модули этих сил определятся:
соответственно, которые прикладываем
перпендикулярно отрезкам OA
и AB
в кинематических парах O,
A
и B.
Модули этих сил определятся:
![]() ;
;
![]() .
.
Все
силы переносим в одноименную точку
плана скоростей без изменения ее
направления. Прикладываем уравновешивающий
момент в виде пары сил
![]() .
.
Записываем уравнение моментов сил относительно полюса плана скоростей:
![]()
![]() , (79)
, (79)
где

Так как на рычаге Жуковского силы показаны в истинном направлении, при составлении уравнения (79) их значения подставляем без учета знака.
Решив (79), найдем силу Fy:
![]()
![]() .
.
Зная
величину Fy,
найдем уравновешивающий момент
![]() :
:
![]() .
.
Полученное число практически совпадает со значением, найденным в п. 1.
Список использованной литературы
1. Смелягин А. И. Структура машин и механизмов. – Новосибирск: Изд-во НГТУ, 2001.
2. Смелягин А. И. Структура, структурный анализ и синтез машин и механизмов. – Новосибирск: Изд-во НГТУ, 1999.
3. А. И. Смелягин Теория машин и механизмов, Курсовое проектирование. – Москва, 2003.
4. Артоболевский И. И. Теория механизмов и машин. – М.: Наука, 1988.
5. Левитский Н. И. Теория механизмов и машин. – М.: Наука, 1979.
6. А. А. Яблонский, В. М. Никифорова Курс Теоретической Механики. Санкт-Петербург, 2001.
Оглавление
3. Динамический анализ машины 18
3.1 Определение параметров динамической модели 19
3.2 Приведенный момент инерции и его производная 19
3.4 ОПРЕДЕЛЕНИЕ ПРИРАЩЕНИЯ КИНЕТИЧЕСКОЙ ЭНЕРГИИ МЕХАНИЗМА 22
3.6 ОПРЕДЕЛЕНИЕ ЗАКОНА ДВИЖЕНИЯ НАЧАЛЬНОГО ЗВЕНА И МОМЕНТА ИНЕРЦИИ МАХОВИКА ПО ДИАГРАММЕ ВИТТЕНБАУЭРА 26
3.7 ОПРЕДЕЛЕНИЕ УГЛОВОЙ СКОРОСТИ И УГЛОВОГО УСКОРЕНИЯ НАЧАЛЬНОГО ЗВЕНА МЕХАНИЗМА 27
4. СИЛОВОЙ АНАЛИЗ МЕХАНИЗМА 29
4.2 СИЛОВОЙ АНАЛИЗ ЭЛЕМЕНТАРНОГО МЕХАНИЗМА И ОПРЕДЕЛЕНИЕ УРАВНОВЕШИВАЮЩЕГО МОМЕНТА 33
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ 36
ОГЛАВЛЕНИЕ 37
36
36