

Білет1
1)Визн ваг карти Кохонена
Коли рецептори передають збудження мозку, то в залежності від
розташування збуджуються лише окремі нейрони. Завдяки наявності
зворотних зв'язків збудження поширюється на сусідні області,
виникає реакція в обмеженій локальній групі нейронів,
синапси яких підсилюються.Таке уявлення дозволяє сформувати
процедуру навчання, що піддається моделюванню на ЕОМ: після подачі
вхідного вектора відшукуються ті нейрони, що на підставі розподілу
ваг у даний момент виявляють найбільшу реакцію. За рахунок зворотного
зв'язку збудяться також сусідні нейрони. Ваги стимульованих нейронів
збільшуються, в результаті чого зростає імовірність того, що при
надходженні повторного вхідного вектора зреагує та ж група нейронів.
Крок 1. Вибираються усі ваги wi j у вигляді випадкових чисел.
Крок
2. Задається
довільний вхідний вектор
 і
проводиться
пошук
і
проводиться
пошук
нейрона i, який виявляє найбільшу реакцію, тобто
|
|
|

тоді i визначає положення центра збудження.
Крок 3. Нехай xk є k-ю координатою , тоді необхідно змінювати синапси wj k
за наступним правилом:
|
|
|

Найбільші зміни wj k будуть у центрі збудження (j = i), а малі — у віддаленні
Від центра (j>>i) або (j<<i); Крок 4. Повторення кроку 2.
2) Сканер— пристрій, що аналізуючи певний об'єкт, створює
його цифрове зображення. Процес отримання такого зображення
називають скануванням. В основі принципу дії сканерів лежить застосування
фотоелементів у вигляді лінійки або матриці світлочутливих датчиків для
вимірювання сигналів оригіналу. Переважно застосовують два типи
датчиків: прилади з зарядовим зв'язком і фотопомножувачі.Види сканерів:
Планшетн(високу якість і прийнятну швидкість сканування. Являє собою планшет,
усередині якого під прозорим склом розташований механізм сканування)
Ручні(у них відсутній двигун, отже, об'єкт доводиться сканувати користувачеві
вручну)
аркушопротяжні(аркуш паперу вставляють у щілину і він протягується
по напрямних роликах усередині сканера повз лампу),
планетарні(застосовують для сканування книг або документів, що легко ушкоджуються)
барабанні(застосовують у поліграфії, мають велику роздільну здатність
(близько 10 тисяч пікселів на дюйм))
слайд-сканери(як виходить з назви, слугують для сканування плівкових слайдів)
Сканери штрих коду(невеликі, компактні моделі для сканування штрих-кодів
товарів у магазинах.)
Білет2
1) Різновид мережі Кохонена, яка дозволяє не тільки проводити кластеризацію
об'єктів, але й виконувати візуалізацію її результатів за допомогою багатовимірного
проектування. Відмінність самоорганізується карти від мережі Кохонена полягає
тільки в кількості вихідних нейронів: в мережі Кохонена воно має відповідати
кількості кластерів, а в карті - кількості сегментів, з якого вона повинна складатися,
тобто розміром картки. Чим вище число сегментів в карті, тим детальніше вона
представляє розподіл ознак об'єктів. Число вхідних нейронів карти, як і в мережі
Кохонена, має дорівнювати числу ознак об'єктів, за яким проводиться їх
кластеризація. На малюнку показана карта розміром 5 х 5, тобто містить
25 вихідних нейронів.
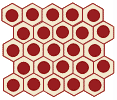
Зменшивши кількість сегментів карти до числа кластерів, ми повернемося до
звичайної мережі Кохонена.Карта Кохонена складається із сегментів прямокутно
ї або шестикутної форми, які називаються осередками. Кожна з них пов'язана з
певним вихідним нейроном карти і являє собою свого роду його «сферу впливу».
Розподіл векторів ваг нейронів карти виходить так само, як і в мережі Кохонена,
тобто на основі конкуруючого навчання. Об'єкти, вектори ознак яких виявляються
ближче до вектора ваг даного нейрона карти, потрапляють в клітинку, пов'язану
з цим нейроном. Тоді розподіл об'єктів на карті в цілому відповідає розподілу
векторів ваг нейронів. Отже, якщо об'єкти на мапі розташовані близько один до
одного, тобто потрапили в одну клітинку або хоча б в сусідні, то і вектори ознак
цих об'єктів близькі, і, навпаки, якщо об'єкти потрапили в комірки, розташован
і на карті далеко один від одного, то і вектори їх ознак розрізняються сильно.
2) Прикладни́й програ́мний інтерфе́йс (API) — набір визначень взаємодії різнотипного
програмного забезпечення. API — це зазвичай (але не обов'язково) метод
абстракції між низькорівневим та високорівневим програмним забезпеченням.
Одним з найпоширеніших призначень API є надання набору широко використовуваних
функцій, наприклад для малювання вікна чи іконок на екрані. Програмісти використовують
переваги API у функціональності, таким чином їм не доводиться розробляти все з нуля.
API є абстрактним поняттям — програмне забезпечення, що пропонує деякий API,
часто називають реалізацією даного API. У багатьох випадках API є частиною набору
розробки програмного забезпечення, водночас, набір розробки може включати як API, так
і інші інструменти/апаратне забезпечення.Високорівневі API часто програють y гнучкості.
Виконання деяких функцій більш низького рівня стає набагато складнішим, або навіть неможливим.
Приклад: Windows API, OpenGL , DirectX, GDI, MARF.
Білет3
1) Визначення усіх ваг виконується шляхом адаптивного навчання, основна ідея якого
полягає в проведенні імітованого охолодження:
а) тільки для схованих комірок вхідні і вихідні величини досліджуваної функції
вводяться у вхідні і вихідні комірки (плюс-фаза);
б) для всієї сітки після того, як вхідні і вихідні величини введені в сітку (мінус-фаза).
Обидва охолодження проводяться почергово і після кожного кроку ваги змінюються так,
що обидва процеси збігаються.
 ,
формула
для корегування ваги
,
формула
для корегування ваги
де
 —
вхідний
вектор;
—
вхідний
вектор;
 —
вихідний
вектор.
—
вихідний
вектор.
Кожний стан сітки можна подати у вигляді

Окремо визначаються:
 -
стан
сітки, отриманий в результаті імітації
охолодження, для випадку,
-
стан
сітки, отриманий в результаті імітації
охолодження, для випадку,
коли до вхідних і вихідних комірок прикладені вхідний і вихідний вектори, і ці комірки
в процесі охолодження більше не змінюються (охолодження тільки дл
схованих комірок, тобто плюс-фаза);
 -
стан сітки, отриманий в результаті
імітації охолодження, для випадку
вільного
-
стан сітки, отриманий в результаті
імітації охолодження, для випадку
вільного
функціонування всієї сітки (мінус-фаза).
Нехай для цих випадків
 —
імовірність
для стану
—
імовірність
для стану
 —
імовірність
для стану
.
—
імовірність
для стану
.
Очевидно, що сітка може вважатися налаштованною на досліджувану
функцію, якщо ваги сітки вивчені так, що
|
|

Існує потенційна функція, яка виконується за умови, яка описується співвідношенням
|
|
|

2) Підсистема управління введенням-виведенням реалізує базові механізми обміну
даними між пристроями введення-виведення та оперативною пам'яттю обчислювальної
машини та забезпечує організацію файлів в файлові системи
.Операція введення виконується як читання даних з зовнішнього пристрою в оперативну
пам'ять, операція виведення - як запис даних з оперативної пам'яті на зовнішній пристрій.
При роботі з файлами система введення-виведення впроваджує спеціальну
абстракцію - потік вводу-виводу, що дозволяє програмам, які звертаються за сервісами
введення-виведення, використовувати одноманітний перелік функцій роботи з файлами
незалежно від типу пристрою, на якому знаходиться файл, та типу файлової системи,
яка містить цей файл. Відмінності доступу до різних пристроїв та файлових систем
забезпечуються додатковими програмними модулями - драйверами пристроїв та файлових систем.
В окремих операційних системах підсистема управління введенням-виведенням т
акож може впроваджувати механізми, які призвані підвищити швидкість обміну
даними між задачами та файлами. Найчастіше використовується механізм
буферизації (кешування) даних, який полягає в тому, що при читанні даних
з файлу підсистема намагається за одну операцію введення читати
дані блоками зручного (звичайно досить великого) розміру, а не порціями, які запитує
задача. Завдяки цьому за одну операцію введення в оперативну пам'ять потрапляють
також додаткові дані, які зберігаються в кеші і в подальшому передаються в програму
без додаткових звернень до пристрою. Подібним чином цей механізм працює і при
виконанні операцій запису.
Білет4
1) Топологія сітки. Сітка Больтцмана аналогічна сітці Хопфілда: є N цілком
взаємозалежних нейронів зі зворотними зв'язками. Як і в сітці Хопфілда, для ваг
справедливі співвідношення
|
|
|

Нейрони сітки розділені на три класи: вхідні, вихідні і сховані. Вони приймають стани 0 і 1.
Функціонування сітки здійснюється наступним чином: величини, що задають, подаються
на вхідні нейрони. Потім відбувається імітоване охолодження, причому так довго,
поки величини на вихідних нейронах перестануть змінюватися. Під час процесу
охолодження у вхідних комірках не повинно відбуватися ніяких змін. Після цього
можна буде знімати вихідні величини з вихідних комірок. Очевидно, що кожному
вхідному
вектору
наводиться
у відповідність вихідний вектор
 і
утворюється
і
утворюється
функціональна залежність
|
|
|

яка запам'ятовується сіткою.
Одне з багатьох застосувань цього типу сіто
к полягає в можливості асоціативного запам'ятовування даних.
2) Принцип технології полягав в наступному. На поверхні фотобарабана коро троном
(скоротроном) заряду, або валом заряду рівномірно розподіляється статичний заряд, після цього
світлодіодним лазером (або світлодіодною лінійкою) на фотобарабані знімається заряд — тим
самим на поверхню барабана поміщається приховане зображення. Далі на фотобарабан наноситься
тонер, після цього барабан прокочується папером, і тонер переноситься на папір коро троном
перенесення, або валом перенесення. Тонер, залежно від знаку його заряду, може притягуватися
до поверхні, що зберегла приховане зображення або фону. Після цього папір проходить
через блок термозакріплення для фіксації тонера, а фотобарабан очищається від залишків
тонера і розряджається у вузлі очищення.Першим лазерним принтером, став EARS
Білет5
1) Розглянемо процедуру імітації охолодження для сітки Хопфілда з n нейронами для пошуку
абсолютного мінімуму на ЕОМ за Pascal-програмою. Ваги і граничні величини задаються
довільними в межах між -1 і +1. Розрахунок починається при температурі Т = 10.
Після кожного етапу розрахунку нейронів визначається величина енергії.
Як тільки припиняється зменшення енергії, тобто Ε(j+1)=E(j), подальше зменшення
температури відбувається за співвідношенням T(j+1) = 0,9 T(j)·
Табл. 4.1. Якісний процес ітерацій
Кількість ітерацій |
Температура |
Енергія |
1
|
10,0
|
0,92
|
10
|
4,8
|
0,92
|
20
|
2,8
|
0,51
|
30
|
2,6
|
1,90
|
40
|
1,2
|
2,48
|
50
|
0,6
|
0,86
|
60
|
0,3
|
-0,20
|
70
|
0,2
|
0,39
|
80
|
0,1
|
-3,79
|
90
|
0,0
|
-5,48
|
100
|
0,0
|
-7,06
|
У першому розрахунку було задано 15 нейронів. Після приблизно 100 ітерацій
був знайдений мінімум енергії. У табл. 4.1 наведений якісний процес ітерацій.
З нього видно, що на початку температура знижується інтенсивно, у той же час у кінцевій стадії
вона більш повільно наближається до нуля. Енергія на початку процесу може навіть декілька
зрости, а потім її закінчення прямує до абсолютного мінімуму -7,06 і далі вниз.
В наступних розрахунках усі ваги і порогові величини були встановлені на 1.
Це має ту перевагу, що мінімальну енергію можна розрахувати вручну
. Було отримано Ε = –97,5. Програма одержала іншу величину точно за 54 ітерації.
Хопфілд і інші дослідники застосували метод "імітації охолодження" для розв'язування задач оптимізації. При пошуку мінімуму для деякого математичного виразу, якщо вдається цей вираз ідентифікувати з енергетичною функцією сітки Хопфілда, в результаті може бути знайдений мінімум розглянутої функції.
2) Блокові і символьні пристрої
Білет6
1) Статистика Больтцмана для статистичного розподілу молекул з енергією Ε використовує формулу
|
|
|

де p(Ε) — імовірність молекул з енергією Е; k — константа розмірності (константа Больцмана);
Т — абсолютна температура (середня температура по всіх частках).З цієї формули випливає
очевидний вираз для двох енергетичних станів E1 і E0 (рис 4.6):
|
|
|

Ця формула (без врахування константи k) точно відповідає формулі, що характеризує два стани
Z0 і Z1 нейронної сітки з відповідними до неї енергіями E0 і E1. Імовірність стану сітки визначається
співвідношенням:
|
|
|

з якого випливає, що процедура охолодження, що імітується, стохастично збігається до абсолютного мінімуму.
|
Рис.4.6. Характер зміни енергії функції Z |

Нехай енергетична функція сітки має вигляд (рис. 4.6). У положенні Z1 знаходиться відносний мінімум, у положенн
і Z0 — абсолютний мінімум. Відповідні величини енергії будуть дорівнювати E1 і E0.
Тоді E0 < El чи E1 – Е0 > 0. Звідси випливає
|
|
|

або p(Ζ0) > p(Ζ1), тобто імовірність стану абсолютного мінімуму перевищує імовірність стану відносного мінімуму.
З наведених співвідношень можна зробити висновок, що імовірність стану Ζ з енергією Е можна подати у видгляді:
|
|
|

Процес імітації охолодження характеризується наступними кроками:
Крок 1 — як стартову величину приймають високу температуру, наприклад
Т = 10.
Потім з рис. 4.7 визначається
 ,
тобто тут спостерігається сталість
,
тобто тут спостерігається сталість
імовірності. "ЕОМ" буде в цій ситуації перескакувати "туди - сюди" між окремими станами, (рис. 4.8).
Крок 2 — поступово зменшують величину Т. З рис. 4.7 видно, що менші стани енергії будуть більш ймовірними.
Система прямує в стан з мінімальною енергією і тепер коливається "туди - сюди" між окремими локальними мінімумами;
|
|
Рис. 4.7. Залежність імовірності ρ від величини енергії Ε |
Рис. 4.8. Крива зміни енергії з декількома змінними |


Крок 3 - задається мала величина Т, наприклад Т = 0,1. Як видно з рис. 4.7, імовірність станів
з великою енергією тепер близька до нуля. Система прямує до абсолютного мінімуму, охолоджується.
2) ) DMA (Direct Memory Access - прямий доступ до пам'яті, або ПДП). Це спосіб (механізм, технологія)
обміну даними між зовнішнім пристроєм і системною пам'яттю без участі процесора, що може
помітно знизити навантаження на процесор і підвищити загальну продуктивність системи.
Необхідно відзначити, що прямий доступ до пам'яті існував в електронній обчислювальній техніці
задовго до появи перших персональних комп'ютерів. Він здійснювався через DMA-контролер - спеціальний чіп, який
отримував початкову команду (дозвіл) на перенесення даних від центрального процесора. У вигляді окремого чіпа
DMA-контролер існував і на перших моделях ПК. Нині DMA-контролер є невід'ємною частиною чіпсета.
IDE контроллер
Білет7
1)Імітація охолодження.Процедура імітаційного моделювання процесу ітерації в сітці
Хопфілда виглядає наступним способом. Нехай задана сітка Хопфілда з вагами wij і
граничними коефіцієнтами di. Для двійкових величин вибирають 1 і 0 (замість ±1).
Відомо, що для розрахунку локального мінімуму процес ітерацій має вигляд:
|
|
|

де p — індекс ітерації.
Цю ітераційну процедуру можна замінити імітаційним процесом, що має покроковий вигляд:
Крок 1— вибір випадкового нейрона т;
Крок 2 — розрахунок величини
|
|
|

Крок 3— приймаємо
|
|
|

Крок 4 — далі повернення до кроку (1).
У принципі імітаційна процедура забезпеч
ує розрахунок, подібний тому, що виконувався раніше Хопфілд-итераціями. Він відрізняється лише тим,
що детерміністський процес ітерацій замінений стохастичною процедурою розрахунку. Як активаційна
функція в обох випадках приймається двійкова функція:
|
|
|

2) Життєвий цикл запиту на введення-виведення
Розглянемо більш докладно процес читання з дискового файлу.
Він складається з наступних етапів:
Визначається пристрій, на якому зберігається файл;
Виконується трансляція імені в уявлення пристрої;
- Фізично лічені дані з диска розміщуються в буфері;
Дані стають доступними для їх запросив процесу;
Управління повертається процесу.
Життєвий цикл запиту на ввід-висновок зображений на

Білет8
1) Визначення ваг для сітки Хопфілда
Якщо маємо образ, який бажано записати в сітку Хопфілда, то ваги шуканої сітки
можна задати аналітично без проведення навчання. Іншими словами: нехай
заданий образ, описуваний n-розмірним вектором . Координатами цього вектора
є числа уj (j = 1,2, ..., n). Приймаючи, що ваги
|
|
|

тоді за
допомогою матриці
 при
при
 =
0
одержуємо опис образу
=
0
одержуємо опис образу
за допомогою Хопфілд-сітки.
Для доказу виконується розрахунок функції:
|
|
|
Легко бачити, що ваги можна множити на позитивні числа, наприклад, на 1/n.
Це доцільно робити при високорозмірних образах для того, щоб числа в розрахунках не були
занадто великими.
|
Рис 4 4 Мініобраз з чотирма елементами (а) і зашумленим входом (б) |
Розглянемо як приклад мініобраз з чотирма елементами
(рис. 4.4, а). Відповідний вектор (образ) має вигляд
|
|
|

Таким чином, у сталому режимі Хопфілд-сітка, що складається з 4 елементів,
буде характеризуватися матрицею
|
|
|

бо в
режимі рівноваги
 ,
і при зашумленому вході, показаному на
рис. 4.4, б,
,
і при зашумленому вході, показаному на
рис. 4.4, б,
буде досить однієї ітерації, щоб сітка розпізнала коректну картину.
|
|
|

2)Струменевий принтер. Принцип дії струменевих принтерів схожий на матричні
принтери тим, що зображення на носієві формується з крапок. Але замість головок
з голками в струменевих принтерах використовується матриця дюз (т. зв. Головка),
друкуюча рідкими барвниками. Друкуюча головка може бути вбудована в картриджі
з барвниками (в основному такий підхід використовується на офісних принтерах
компаніями Hewlett-Packard, Lexmark). В інших моделях офісних принтерів
використовуються змінні картриджі, друкувальна головка, при заміні картриджа
не демонтується. На більшості принтерів промислового призначення чорнило
подаються в голови, закріплені в каретці, через систему автоматичної подачі чорнила.
Білет9
1) енергетична функція.Зміна стану будь-якого нейрона ініціалізує зміна енергетичного стану мережі
в напрямку мінімуму її енергії аж до його досягнення. У просторі станів локальні
енергетичні мінімуми E представлені точками стабільності, званими ат тракторами
через тяжіння до них найближчого оточення. Завдяки наявності атракторів,
рекурентні мережі можуть бути використані як пристрої асоціативної пам'яті.
![]()
Енергетична функція
2) переривання Лінія запитів на переривання (переривання - переривання) перемикається пристроєм введення-виведення,
яке сигналізує за допомогою запиту на переривання про початок або закінчення вводу-виводу. Обробник переривань отримує сигнал про переривання. Сигнал може бути замаскований (маскуються),
щоб ігнорувати чи затримати переривання - наприклад, якщо переривання відбулося в обробнику іншого
переривання.Вектор переривань - резидентний масив, що містить адреси обробників переривань
в операційній системі, - використовується з метою переадресування переривання для обробки відповідним
обробником (обробник). Робота з вектором переривань заснована на пріоритетах зовнішніх пристроїв,
що ініціювали переривання.
Білет10
1) Сітки хопфілданейронні сітки, у яких вихідний сигнал знову подається на вхід
сітки, в результаті чого виникає ітераційний процес — утворюється сітка із зворотним зв'язком
Прийнятий тип сітки має лише один шар нейронів. Кожний нейрон з'єднаний із всіма іншими і
сам із собою, в результаті мають місце числені зворотні зв'язки. Активаційна функція f нейронів
є граничною функцією. До всіх нейронів сітки надходять вхідні сигнали, що можуть приймати
значення +1 чи -1. Оскільки, крім того, усі ваги є цілочисельними, наступні розрахунки легко
виконуються. Хопфілд-сітки, що відносяться до автоасоціативних накопичувачів, мають однакову
кількість вхідних і вихідних образів, і кожному вхідному образу ставиться у відповідність відомий
аналогічний вихідний образ.
2) Продуктивність вводу-виводу Введення-виведення - важливий фактор в продуктивності системи.
Є кілька факторів, що визначають, наскільки введення-виведення критичний по ефективності
в системі: • Введення-виведення вимагає від процесора виконання драйвера пристрою - коду рівня ядра ОС; • Необхідно виконувати контекстні перемикання, пов'язані з перериваннями; • Необхідно виконувати копіювання даних. Особливо напруженим в будь-якої комп'ютерної системи є мережевий трафік, так як його швидкість
фактично визначає швидкість і продуктивність роботи всієї розподіленої системи
(наприклад, роботи з віддаленими файловими системами), а також швидкість отримання
інформації з Інтернету або корпоративної мережі. На рис. 21,7 зображена детальна схема взаємодії комп'ютерів при наборі символьної
інформації та передачі її через мережу. Схема дає уявлення про складність взаємодії,
діях апппаратури та програмного забезпечення, що виконуються для кожного набраного
і переданого символу, кількості переривань, їх обробок та відповідних тематичних перемикань.

Білет11
1) Неокогнітрон
Ідея когнітрону висувалася для розпізнавання образів, але вона не спрацьовує (так само,
як і сітки Хопфілда) при трансляції або перекручуванні зображення. У зв'язку з цим авто
когнітрону Фукушима в 1980 р. розширив його, перетворивши в неокогнітрон [ ].
Так само, як у когнітроні, тут існує два типи нейронів: S-нейрони (S-Simple) і С-нейрони (Complex).
S- і С-нейрони утворюють шари, що чередуються в сітці по черзі один за одним
, чи точніше: вхідним є S-шар, а за ним іде С-шар і т.д. вихідний як С-шар. Здатністю
до навчання володіють тільки ваги до S-шарів.
Відмінною рисою такої сітки є те, що рецептивна (приймальна) область нейрона складається лише
з декількох нейронів попереднього шару (рис. 3.8). До того ж ця сітка по лінії передачі сигналів
винятково симетрична. Завдяки цьому сітка в певній мері толерантна до локальних помилок в
образі, особливо це до певного ступеня виявляється при трансляції і перекручуваннях образу.
Неокогнітрон спочатку був орієнтований на моделювання зорової системи людини. Але оскільки в ньому
відсутні обмеження для використання тільки для обробки візуальних даних, він досить універсальний і
може знайти широке застосування як узагальнена система розпізнавання образів. Необхідно, однак,
враховувати, що неокогнітрон є складною системою і вимагає істотних обчислювальних ресурсів, що поки
ускладняє його використання для побудови оптимальних інженерних систем розпізнавання образів [ ].
2)
Білет12
1) Когнітрон
Когнітрон - варіант багатошарової нейронної сітки . для систем адаптивного розпізнавання образів [ ].
Ця структура являє собою вперед спрямовану сітку, що містить n шарів, причому кожний шар
має два типи нейронів (рис. 3.8): збуджуючі, або активізуючі (excitatory) і гальмуючі (inhibitory) нейрони.
Збуджуючі нейрони мають позитивні, а гальмуючі - негативні ваги. Збудження дійсно позитивні,
оскільки застосовано наступну активаційну функцію:
|
||
Рис. 3.8 Тришаровий когнітрон: I, II, III — шари когнітрона; I — активізуючі нейрони; 2 - гальмуючі нейрони |
||
|
|
|

Структуру сітки на рис. 3.8 побудовано так, що гальмуючі нейрони кожного шару
стимулюються тільки активізуючими нейронами цього ж шару, у той час як на активізуючи
нейрони наступного шару впливають як збуджуючі, так і гальмуючі нейрони попереднього шару.
Збудження активізуючого нейрона визначається зваженою сумою його збуджуючих і гальмуючих входів.
Для тренування сітки застосоване навчання без учителя як більш правдоподібне. Одержуючи
навчальний набір вхідних образів, сітка самоорганізується за допомогою зміни ваг семантичних
зв'язків. При цьому відсутні попередньо визначені кінцеві образи, що представляють необхідну
реакцію сітки, проте сітка самонастроюється з метою розпізнавання кінцевих образів з високою
точністю. Процедура навчання базується на розширеному правилі Хэбба: вага wi j корегується в той
момент, коли нейрон i збуджений і коли нейрон j уявляє собою постсемантичну комірку з
найбільшою активністю.
Згідно рис. 3.8 вхідні сигнали постсемантичного нейрона багаторазово перекриваються.
Це дублювання функцій виправдовується взаємною конкуренцією між найближчими нейронами.
Якщо сусідні нейрони в початковий момент мають ідентичний вихід, незначні відхилення все-таки
будуть мати місце. В результаті один з цих нейронів буде мати більш сильну реакцію на вхідний
образ, аніж сусідні нейрони. Його сильне збудження буде впливати на збудження сусідніх
нейронів, і тільки його сигнали будуть підсилюватися, а сигнали сусідніх нейронів
залишаться незмінними (див. рис. 3.6).
Вихід збуджуючого нейрона в когнітроні визначається відношенням його збуджуючих входів до
гальмуючого.
2) Контролер (хост-адаптер) - спеціалізований мікропроцесор для управління
зовнішнім пристроєм і портом. Контролер зовнішнього пристрою - це пристрій
керування командами вводу-виводу з даними зовнішнім пристроєм. Пристрої мають
адреси, використовувані командами безпосереднього введення-виведення і командами
вводу-виводу, що відображається в пам'ять. Кожен контролер усттройства використовує
свій буфер пам'яті для зберігання одного або декількох блоків інформації, розташований
або в спеціалізованій пам'яті пристрою (контролера), або є частиною оперативної пам'яті
компьтерной системи.
Білет13
1) Узагальнена RBF
Вищенаведене застосування гаусівських RBF для апроксимації функцій має недолік, який полягає
в тому, що з розширенням смуги перетворення Фур'є зростає кількість необхідних базисних функцій.
До того ж, щонайменше залишається неясним, чи може в принципі бути розрахованою перетворена з
а Фур'є поточково дана функція. Тут потрібно застосування непрямої оцінки.
У
розглянутому застосуванні RBF середні
точки
 ,
базисних функцій розташовувалися по
всьому діапазонові
,
базисних функцій розташовувалися по
всьому діапазонові
з рівномірною щільністю, навіть якщо апроксимована функція тільки на окремих ділянках не є гладкою, для яких
необхідне застосування більшого числа базисних функцій. Але це викликає збільшення необхідного обсягу пам'яті ЕОМ.
На
відміну від вищеописаного прийому в [
] запропоноване застосування
рухомих середніх точок

базисних
функцій: додатково
до коефіцієнтів ck
і
 у рівнянні (3.11) проводити підстроювання
значень
.
у рівнянні (3.11) проводити підстроювання
значень
.
Цей прийом з узагальненими RBF (generalized RBF, GRBF) у випадку задання вільних параметрів істотно знижує
обсяги необхідної пам'яті й обчислень. Але з ішого боку виключається можливість задання межі за точністю для процесу
апроксимації.
2)Матричні принтери. Контролер (хост-адаптер) - спеціалізований мікропроцесор для управління
зовнішнім пристроєм і портом. Контролер зовнішнього пристрою - це пристрій керування командами
вводу-виводу з даними зовнішнім пристроєм. Пристрої мають адреси, використовувані командами
безпосереднього введення-виведення і командами вводу-виводу, що відображається в пам'ять.
Кожен контролер усттройства використовує свій буфер пам'яті для зберігання одного або декількох
блоків інформації, розташований або в спеціалізованій пам'яті пристрою (контролера),
або є частиною оперативної пам'яті компьтерной системи.
Білет14
1) Вибір архітектури нейронної сіткі
Реалізація нейронною сіткою деяких логічних функцій вимагає прийняття рішення про
вибір одно - чи багатошарової архітектури сітки: скільки повинно бути схованих нейронів
в окремих шарах, чи є достатньою одношарова сітка
для всіх випадків, чи є логічні функції, які через їхню складність вимагають багатошарової сітки.
В роботі [ ] доведено, що будь-яка функція, яка містить n вхідних і k вихідних бітів, може
бути подана двошаровою нейронною сіткою. Якщо для адаптації сіткою задано функцію у вигляді пар:
|
|

і усі вихідні вектори yk різні, то в схованому шарові повинні бути два різних вихідних вектори з різними
розташуванням. Таким чином, можливе мінімум N різних розташувань, і це при k схованих нейронах
буде мати місце, якщо
|
|
 або при
або при

Звідси випливає, що якщо N - кількість різних вихідних векторів функції, що адаптується, то кількість
схованих нейронів у двошаровій сітці повинна бути не менш двійкового логарифму lg(N).
2) порт – контроллер и разъем (либо беспроводное устройство) для передачи данных между
устройством ввода-вывода и компьютером. Каждый порт имеет свое традиционное
обозначение и свой номер в системе. Порт может существовать физически, как разъем для
проводного соединения и связанный с ним контроллер порта (например, USB – универсальный
порт для подключения широкого спектра устройств; LPT – порт для подключения принтеров и
сканеров), либо может быть организован операционной системой как виртуальный порт для
унификации обработки внешних устройств. Виртуальные порты, обычно – коммуникационные
порты (COM) с большими номерами – например, COM10, COM15, - организуются для
обмена с устройствами беспроводной связи – например, мобильными телефонами и
органайзерами. Беспроводная связь чаще всего организуется через Bluetooth – радиосвязь
на расстоянии до 20 м, в новых стандартах – до 1 км.
Білет15
1) Застосування багатошарових персептронів (MLP)
У багатошарових персептронах застосовуються в рівнянні (4.54) різні типи базисних функцій:
|
|
|
 =g
=g
 ,
,
наприклад
Звичайно,
активаційна функція
 має
характер насичення.
Базисні функції мають
має
характер насичення.
Базисні функції мають
скалярний аргумент. Це означає, що вихідна n-розмірна задача апроксимації шляхом
вагової суперпозиції розкладається на прості скалярні базисні функції. Стиск n-мірного
вхідного простору до 1-мірного входу здійснюється шляхом скалярного добутку
 Це
можна
пояснити проектуванням вхідних даних
x на
вектор ваги
Це
можна
пояснити проектуванням вхідних даних
x на
вектор ваги

2) Блокується (синхронний) і не блокується (асинхронний) введення-виведення Для оптимізації вводу-виводу в системі підтримується, крім традиційного синхронного
(блокується), також асинхронний ввід-висновок. Блокується введення-виведення заснований на простій, інтуїтивно зрозумілою парадигмі:
процес затримується, поки введення-виведення не закінчиться. Він більш простий для
використання і розуміння, але. в силу своєї недостатньої ефективності, недостатній для
деяких застосувань. Для оптимізації вводу-виводу повернення з системного виклику для
введення-виведення може проісходітт в міру доступності інформації. Застосовується для
користувача інтерфейс для копіювання даних (буферизація). Введення-вивід також
частина реалізується за допомогою багатопоточності (багатопоточність):
введення-виведення виділяється в окремий потік. З системних викликів для вводу-виводу
передбачений швидке повернення з видачею в якості результату числа байтів, фактично
прочитаного або записаного. Асинхронний введення-виведення заснований на іншій парадигмі: процес виповнюється
одночасно з виконанням вводу-виводу. Внаслідок цього, він складніший у використанні,
так як більшість програмістів досі звикли мислити і реалізовувати програми в послідовному стилі.
Після завершення асинхронного вводу-виводу підсистема вводу-виводу генерує сигнал
(виключення) в процесі, його використовує. Програмування асинхронного вводу-виводу засноване
на використанні пари операцій типу почати асинхронний ввід-висновок і закінчити асинхронний
ввід-висновок (почекати його результатів). Така схема чревата помилками, так як програмістам
властиво забувати завершальні дії, парні ініціалізувалися, якщо середу розробки їм про це
не нагадує. Однак саме асинхронний ввід-висновок забезпечує найбільшу ефективність.
Білет16
1) Вибір архітектури нейронної сіткі
Реалізація нейронною сіткою деяких логічних функцій вимагає прийняття рішення про вибір
одно - чи багатошарової архітектури сітки: скільки повинно бути схованих нейронів в окремих
шарах, чи є достатньою одношарова сітка для всіх випадків, чи є логічні функції, які через
їхню складність вимагають багатошарової сітки.
В роботі [ ] доведено, що будь-яка функція, яка містить n вхідних і k вихідних бітів, може
бути подана двошаровою нейронною сіткою. Якщо для адаптації сіткою задано функцію у вигляді пар:
|
|

і усі вихідні вектори yk різні, то в схованому шарові повинні бути два різних вихідних вектори з різним
розташуванням. Таким чином, можливе мінімум N різних розташувань, і це при k схованих нейронах
буде мати місце, якщо
або при |
|
Звідси випливає, що якщо N - кількість різних вихідних векторів функції, що адаптується, то кількість
схованих нейронів у двошаровій сітці повинна бути не менш двійкового логарифму lg(N).
2) Годинники і таймери Дані хронометричні пристрої в комп'ютерній системі зберігають інформацію про поточний
час, що пройшов відрізку часу, установках таймера. Як правило, операційна система використовує програмовані інтервали часу для роботи
з таймером. Таким чином в системі організовуються періодичні переривання з метою опитування
пристроїв та диспетчеризації процесів. В системі UNIX роботу з годинником та таймером підтримує системний виклик і
команда IOCTL. Крім того, в системі є процес-демон крон, за допомогою якого в системі
організуються події, що відбуваються в призначений час, - наприклад, автоматичне резервне
копіювання всіх найбільш важливих файлових систем на стрічку.
Білет17