

Задачи параметрического программирования (зпп)
ЗПП является обобщением задач ЗДЛП. В задачах ПП коэффициенты при переменных в целевых функциях зависят от некоторого параметра. Для задач параметрического программирования должны выполняться следующие условия
Коэффициенты целевой функции являются линейной функцией от некоторого параметра T
Система ограничения в задачи линейная и однозначно определяет выпуклый многогранник планов
Коэффициенты системы ограничений являются постоянными величинами
Целевая функция имеет вид
F (x)
=
(x)
=
max
max



Для корректной постановки ЗПП необходимо задать интервал изменения параметра Т.
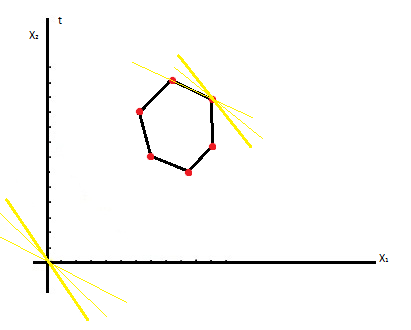
Геометрическая интерпретация ЗПП
Будем считать что число переменных =2, тогда целевая функция будет иметь вид t(x)=(c1+d1t)x1+(c2+d2t)x2
Таким образом исходя из характера поведения целевой функции можно окончательно определить основную цель решения ЗПП:
На заданном интервале изменения параметра Т, принадлежащего от α до β выделить под-интервалы от α1 до α2, от α2 до α3, от α3 до α4, в которых максимум целевой функции обеспечивается в одной и той же крайней точке многогранника плана, а также найти решение соответствующего каждому из под-интервалов.

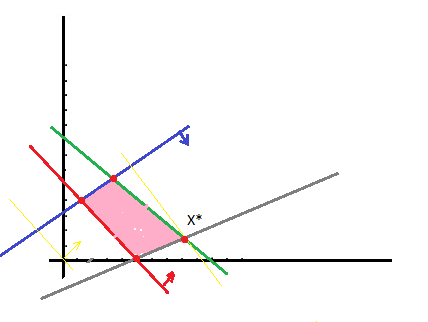
F(x)=4x1+(2+t)x2 max
2 x1-5x2
x1-5x2 10
10
X1+X5 5
5
-x1+x2 4
4x1+5x2 40

2x1-5x2=10
4x1+5x2=40
6x1=50
X*1=8,33
X*2=1,33
X*=(8,33;1,33)
F(X*)=35,98
kцф=-4/(2+t)
dk/dt=-1*(-4)/(2+t)2=4/(2+t)2
В нашем случае прямая будет вращаться против часовой стрелки.
В определенный момент k станет равен одному из ограничений (четвертому).
4/(2+t)=-4/5
П ри
t
ри
t [0;3)
Х*=(8,33;1,33)
[0;3)
Х*=(8,33;1,33)
-x1+x2 4
4x1+5x2 40
9х2=56
Х*2=6,22
Х*1=2,22
При t (3;8] Х*=(2,22;6,22)
При t=3 Х*=[a;b]
Общие случаи решения зпп
Когда число переменных в задаче более 2, она не может быть решена графическим способом и для её решения используется модифицированный симплекс алгоритм.
Процедура реализуется в 2 этапа
Параметру t придают некоторое фиксированное значение t=α. Задачу приводят к классической ЗЛП. Решают ЗЛП
Определяют интервалы распределения параметра t в которых решение достигается в одной и той же точке многогранника решений.
Пусть этот интервал будет [α1; α2]
Указанный интервал сравниваю с интервалом [α;β] и исключают из рассмотрения/
Параметру t придают значение α2 и повторяют этап 2
Порядок выделения под-интервалов
Придадим параметру t значение α и запишем задачу в виде симплекс таблицы.
В.П |
С.Ч |
Х1 |
Хr |
Xn |
Xn+1 |
B1 |
aij |
||
Xn+k |
Bk |
|||
Xb+ |
Bm |
|||
f α |
0 |
-(c1+d1 α) |
-(cr+dr α) |
-(cn+dn α) |
|
0 |
-c1 |
-cr |
-cn |
|
0 |
-d1 |
-dr |
-dn |
Предположим что мы все решили
В.П |
С.Ч |
Х1 |
Хr |
Xn |
X*n+1 |
B*1 |
α*ij |
||
X*n+k |
B*k |
|||
X*n+m |
B*m |
|||
f α |
F |
-(p1+q1 α) |
-(pr+qr α) |
-(pn+qn α) |
|
P |
-p1 |
-pr |
-pn |
|
Q |
-q1 |
-qr |
-qn |
Pj+qjα>=0
Таким образом для определения возможной границы изменения параметра t необоходимо проанализировать поведение величин
P1+q1t
P2+q2t
….
Pn+qnt
Возможны 3 случая
Все qj>0. Верхней границы для t не существует, а нижняя определяется αj=max(-pi/qi) α2=+бесконечность
Все qj<0. Нижней границы для t не существует, α1=-бесконечность, α2=min(-pi/qi)
Среди qj есть положительные и отрицательные. Для t существуют обе границы. причем α k=max(-pi/qi) для всех qj>0 и α2=min(-pi/qi) для всех qj<0