

2.3. Особенности расчета радиолокационных приемников
Задания на проектирование радиолокационных приемников (таблицы 6-8) разработаны для одноканалыгых импульсных РЛС обнаружения различного назначения. Такие РЛС имеют широкое распространение и характеризуются относительной простотой технических решений.
При импульсном режиме работы облучение цели производится не одним импульсом, а последовательностью из п импульсов (пачкой). Закон изменения начальной фазы сигнала от импульса к импульсу может быть как известным, так и неизвестным. В соответствии с этим пачки импульсов подразделяются на когерентные и некогерентные. Когерентные пачки могут приниматься как когерентно, так и некогерентно. При выполнении, кур-сового проекта следует считать, что на вход приемника поступаег когерентная пачка.
Упрощенная структурная схема одноканального импульсного РИУ при некогерентной обработке сигналов изображена на рис.8 [3,51. Сигнал па вход РИУ поступает от антенного переключателя АН, позволяющего использовать одну антенну для совместной работы передатчика и приемчика. На рис.8 представлена обычная последовательность операций обработки, которые имеют место в любом некогерепгном приемнике РЛС при всем разнообразии выходных сигнален, хотя реальные приемники не обязательно формируют все указанные выходные сигналы и могут не содержать отдельных функциональных узлов. В качестве МШУ обычно используются транзисторные, параметрические усилители, а также усилители на ЛБВ и туннельных диодах. В
качестве преобразователей частоты широкое распространение получили балансные диодные ПЧ [3,5]. Автоматическая иод-стройка частоты (АПЧ) используется для поддержания постоянства промежуточной частоты. На рис.8 блок, обозначенный как
ВУ МШУ ФЗК ПЧ УПЧ АД ГФ
^ |
О |
^ Яй |
—*■ Sj/f- |
ЛРУ |
■+2?-+* |
||
L |
- АП t |
1 |
,пч |
G ы АПЧ |
пу Ш элт- ¥*г* ЭВМ, 1 им |
||
|
РПдУ |
—*'у |
|
унч |Р>[-> |
|||
|
|
|
|||||
Рис.8
АПЧ, содержит частотный детектор и ФНЧ. Из-за различных дальностей до целей РЛС обнаружения принимает отраженные сигналы столь различные по уровню, что применение АРУ в виде ВАРУ и БАРУ становится необходимым.
Значения фаз высокочастотных колебаний при некогерепт-ной обработке не учитываются, поэтому в приемнике производится выделение огибающей импульсного сигнала с помощью АД и последетекторное накопление видеоимпульсов в гребенчатом фильтре ГФ. Результат этого накопления сравнивается с пороговым напряжением в пороговом устройстве НУ.
Для того, чтобы получить па входе АД максимально достижимое отношение сигнал-шум, УПЧ должен быть согласован с импульсным сигналом, т.е. представлять собой согласованный фильтр (СФ). Тем не менее, для простых импульсных сш налов обычно используется не СФ, а квазиопгнмальный фильтр, в качестве которого выступает тракт УПЧ с полосой пропускания П=1/Г.
Повышение разрешающей способности и точности измерения РЛС становится возможным при переходе от простых импульсных к сложным сигналам, например, с внутриимпульспой
-28-
-29-
линейной частотной модуляцией. В этом случае тракт промежуточной частоты РПУ должен содержать СФ, оптимальный для отдельного импульса пачки (использование квазиоптимального фильтра в этом случае неприемлемо). На выходе СФ импульсы сложной формы сжимаются в Кок раз (Ксж^Л/дев) » снимается
их внутриим-
п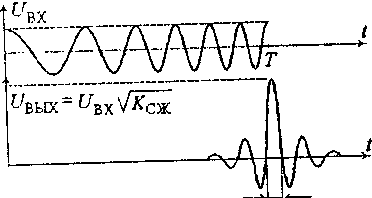 ульсная
модуляция
(рис.9). В общем случае СФ тем
сложнее, чем больше
база сигнала [4].
ульсная
модуляция
(рис.9). В общем случае СФ тем
сложнее, чем больше
база сигнала [4].
Рис.9
Когерентное накопление импульсов в пачке применяется в тех случаях, когда закон изменения фазы от импульса к импульсу известен. В этом случае ГФ включается непосредственно за СФ. Результат накопления импульсов в ГФ при этом представляет собой некоторый процесс на промежуточной частоте. Этот процесс может быть продетсктировап в когерентном или некогерептпом детекторе.
В первом случае в качестве когерентного детектора обычно используется фазовый детектор ФД, причем для поддержания постоянного уровня вероятности ложной тревоги /V=consl перед ФД ставится ограничитель. Достоинством когерентною детектирования сигнала оказывается возможность селекции движущихся целей. Действительно, поскольку опорное колебание ФД когерентно с излучаемым сигналом, огибающая последовательности вплсоимпудьсов на выходе ФД от неподвижной цели будет постоянной, а от движущейся - изменяться с частотой Доплера.
Во втором случае - при пекогерентпом детектировании сигнала на выходе ГФ - в качестве детектора используется обычный АД (диодный, [рапзпеторпый и т.д.). Один из возможных вариатор, построения подобного РПУ приведен на рис.10. Последо-
вательность операций обработки и назначение отдельных каскадов когерентного и некогерентного приемников во многом повторяются.
|
ВУ |
МШУ |
ПЧ |
\ |
/ПЧ |
|
ГФ |
|
АД |
|
ПУ |
|
УНЧ |
||
/ |
АП |
—► |
О |
-+ |
Ун |
—► |
О .к ЛРУ |
—► |
^ |
—► |
ж |
|
ж |
|
1 |
" |
г ПЧ |
G |
элт, ЭВМ им |
||||||||||||
|
РПдУ |
-*■ |
f/j |
АПЧ |
|
||||||||||
. Рис.10
Расчет радиолокационных приемников имеет ряд особенностей. Ширина спектра сигнала определяется выражением
П(г=В/Т, (12)
где 6=1 для простых импульсных сигналов, а для сигналов с внутриимпульсной модуляцией В»\.
Отношение у вх > входящее в выражение (2) для допустимого коэффициента шума Ш когерентного и некогерентного приемников, рассчитывается с использованием формул
(13)
Гвх-к =Гвых-к'»В,
1 ^ I—
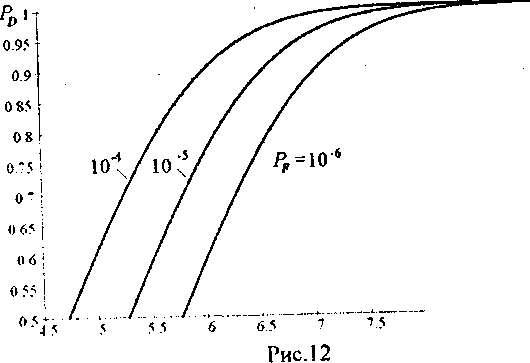
Хвх-ик =Увых-нк/чп В. Отношения сигнал-шум 7вых-к и /вых пк ма выходе линейного тракта РПУ, т.е. на входе детектора, могут быть получены из характеристик обнаружения [4] (рис.11-12). На vmx i рафиках для некогерентного приема аргументом является величина
Гвых-нк ,уГ"> а для когерентного - Гшхк-
Гвых-к = Щф'1(Ро)+у/2Щ\/Ру]\ (14)
У
^[1 + ф-'(/>/>) ~Ф "'(Ml. (15)
вых-ик
где Ф"'() - функция, обращая ннтефалу вероятности.
-30-
-31-
8 S5 9
^DbtX-HK
/ V и
0.9 |
0.85 j
0.8 f
Л =10"'
lo-J/ ю;
i 0.75 \
0.7
0 65
26 28 30
06 0.55
0 5
16
10
Г,
18 20
ВЫХ-К
~U
Рис.11
Динамический диаиачом входных сигналов приемника равен
где Лтах и Rmm выбираются из условий
/?max = (0,3-0,4)c/F, (17)
/?min=c(r + rB)/2. (18)
Здесь с-скорость света, Т и F - длительность и период повторения зондирующих импульсов, гв = (1-3)мкс - время восстановления АП РЛС.
,, Динамический диапазон выходных сигналов Овых определяет режим работы выходных устройств и обычно составляет = £)вых=10 дБ. Таким образом, диапазон регулировки усиления системой АРУ
£>ару = Овх-£>вых- С9)