

На основе полученных результатов выбираем конденсаторы силового фильтра по каталогу [4], например к50-17 560мкФ 800в, со следующими техническими данными:
Таблица 2.4.1 – Технические параметры фильтрующего конденсатора.
Тип |
К50-17 |
Номинальное напряжение, В: |
800В |
Номинальная емкость, мкФ: |
560 |
Допуск номинальной емкости, % |
±10% |
Диапазон рабочих температур, o С: |
-20...50 |
Производитель: |
ОАО ЭЛЕКОНД |
2.5 Выбор анодного реактора
Анодный реактор
применяется для ограничения тока
короткого замыкания на уровне, не
превышающем ударный ток прибора
 – для выбранных диодов входного
выпрямителя. Расчёт реактора производится
по ударному току диода. Индуктивность
анодного реактора определяем по формуле:
– для выбранных диодов входного
выпрямителя. Расчёт реактора производится
по ударному току диода. Индуктивность
анодного реактора определяем по формуле:
 (2.5.1)
(2.5.1)
где
 – коэффициент, учитывающий наличие
свободной составляющей в токе короткого
замыкания
– коэффициент, учитывающий наличие
свободной составляющей в токе короткого
замыкания
 .
Принимаем
.
Принимаем

 –
количество реакторов
ограничивающих ток короткого замыкания
–
количество реакторов
ограничивающих ток короткого замыкания
 ;
;
 – линейное
напряжение питающей сети;
– линейное
напряжение питающей сети;
 – угловая частота
питающей сети;
– угловая частота
питающей сети;

По каталогу [5] выбираем анодный реактор FR-BAL-B-30K со следующими данными:
линейное напряжение сети 380В;
номинальный фазный ток 76А;
индуктивность Lар=0,389 мГн;
2.6 Выбор тормозного резистора.
 ,
(2.6.1)
,
(2.6.1)
где J, w —момент инерции электропривода и угловая скорость АД
 —потери мощности
в АД и АИН
—потери мощности
в АД и АИН
Iт—ток в тормозном сопротивлении Rт
где
 А.
А.
Потери мощности
в АД

Потеря энергии в АД:
Мощность потерь в ключе:
 (2.6.2)
(2.6.2)

где Eon, Eoff - энергия при включении и выключении ключа;
Ic -
номинальное значение тока стока ключа;
-
номинальное значение тока стока ключа;
f
-  тактовая
частота или частота коммутации ключа,
Гц ;
тактовая
частота или частота коммутации ключа,
Гц ;
D - рабочий цикл или максимальная скважность уmax ;
UCEsat- напряжение сток-исток ключа.
Потери мощности
в ПЧ:
 .
.
Потеря энергии в ПЧ :
 (2.6.3)
(2.6.3)

Получаем значение сопротивления:
 (2.6.4)
(2.6.4)

Выбираем тормозной модуль компании Mitsubishi Electronic типа МТ-BU5 c резистором МТ-BR5 сопротивлением 6,5 Ом [15].
3. Проектирование системы управления электроприводом
3.1 Сравнение возможных вариантов и выбор структуры суэп
Основные требования на основании которых производится выбор структуры СУЭП:
- Максимальное перемещение Smax=6м;
- допустимая статическая ошибка δ=0,5мм
Под скалярным управлением понимают все невекторные системы управления электроприводом. Они включают простые системы управления асинхронным двигателем при питании от источника напряжения регулируемой частоты, а также более сложные системы частотно-токового управления.
Скаляр переменного напряжения представляется только величиной, полученной с помощью непосредственного измерения, расчета или преобразования мгновенных значений. Следовательно, общей чертой всех скалярных систем управления является модуль регулируемой величины. Эта скалярная величина используется как в разомкнутых, так и в замкнутых системах частотного управления асинхронными двигателями.
Предпосылками для разработки векторных систем управления были недостатки в формировании динамики электропривода переменного тока в скалярных системах частотного управления. Магнитный поток двигателя в переходном процессе не остается постоянным, поэтому в переходном процессе возможны колебания электромагнитного момента и скорости. Векторное управление - это частотное управление, где в качестве управляющих воздействий используются пространственные векторы электромагнитных величин. При использовании векторного управления, возможно, независимо изменять магнитный поток и электромагнитный момент двигателя с помощью составляющих вектора тока статора.
Если учесть что допустимая статическая ошибка довольно велика и малый диапазон регулирования, то можно применить скалярный метод, но для улучшения динамики все же используем векторное управление.
Так как используется
АД с короткозамкнутым ротором то наиболее
простым в реализации векторного
управления будет использование векторов
управления:
 и
и
 .
.

Функциональная схема изображена на рисунке 3.1.1
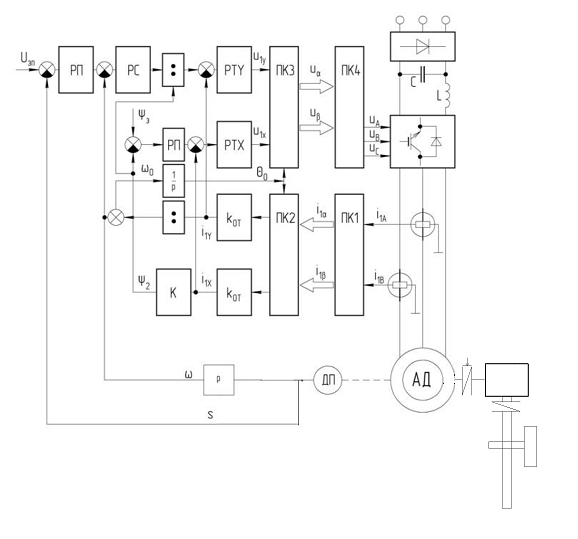
Рисунок 3.1.1 – Функциональная схема системы векторного управления.