

§ 25.4. Трехфазные магнитные усилители
Трехфазные магнитные усилители обычно используются для управления исполнительными устройствами систем автоматики при питании от промышленной сети трехфазного переменного тока. Они могут питать нагрузку переменного или постоянного тока.
Трехфазные магнитные усилители с выходным переменным током чаще всего применяются для регулирования частоты вращения трехфазных асинхронных электродвигателей (это, кстати, наиболее распространенный потребитель электроэнергии в народном хозяйстве) и для стабилизации напряжения трехфазных источников питания.
Трехфазные магнитные усилители с выходным постоянным током обеспечивают по сравнению с однофазными усилителями значительное уменьшение пульсаций выпрямленного напряжения, повышение КПД, равномерную загрузку фаз питающей сети.
Трехфазные магнитные усилители представляют собой три одинаковых однофазных магнитных усилителя, рабочие обмотки которых подключаются к трехфазной сети по схеме «звезда» или «треугольник». При этом на каждую фазу может приходиться по одному или по два сердечника. Соответственно
с этим различают трехфазные усилители на трех сердечниках (трехдроссельные) и на шести сердечниках (шестидроссельные).
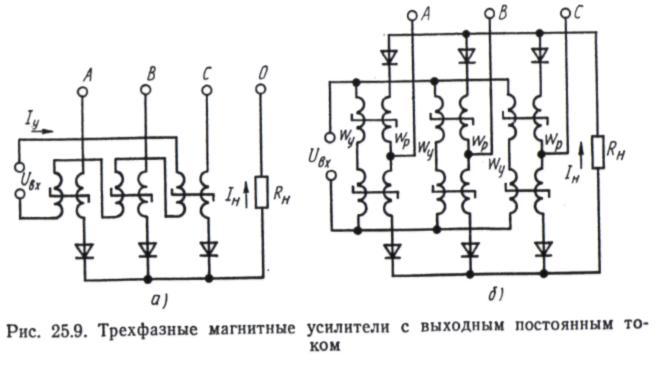
На рис. 25.9 показаны схемы трехфазных усилителей с выходным постоянным током. В каждой фазе схемы по рис. 25.9, а имеется однотактный одно-полупериодный усилитель на одном сердечнике, общая нагрузка Rn включается в нулевой провод. Основное достоинство этой схемы заключается в простоте и дешевизне конструкции усилителя, что обусловлено малым числом элементов. Существенными недостатками усилителя на трех сердечниках по сравнению с усилителем на шести сердечниках (рис. 25.9, б) являются более низкий КПД и более значительные пульсации выпрямленного напряжения на нагрузке. В схеме (рис. 25.9, б) высокий КПД и малые пульсации выходного напряжения обеспечиваются благодаря двухполупериодному выпрямлению тока в каждой из фаз.
В
схеме с тремя сердечниками допустимо
только последовательное соединение
всех трех обмоток управления. Однако
при этом в обмотках управления наводится
напряжение тройной частоты (из-за
несинусоидальности тока в рабочих
обмотках при насыщении сердечников). В
схеме с шестью сердечниками удается
довольно успешно бороться с наведенным
напряжением повышенной частоты. Например,
в схеме но рис. 25.9, б
используется
параллельное соединение трех пар обмоток
управления и последовательное соединение
обмоток управления пары сердечников в
каждой фазе. В этом случае в каждой паре
обмоток управления wy,
относящихся
к одной фазе, индуцируются четные
гармоники ЭДС. При этом вторые (самые
крупные) гармоники ЭДС одной пары обмоток
wу
сдвинуты по фазе на 120 или 240° относительно
этих же гармоник двух других пар обмоток
wу.
При параллельном соединении отдельных
пар обмоток управления, как это сделано
в схеме по рис. 25.9, б,
четные
гармоники тока могут свободно циркулировать
по этим обмоткам, не оказывая влияния
на источник входного сигнала. Напряжение
удвоенной частоты на зажимах обмоток
управления будет небольшим, а характеристика
«вход-выход»![]() будет
такой же линейной, как у обычных однофазных
усилителей. В усилителе на трех сердечниках
зависимость
будет
такой же линейной, как у обычных однофазных
усилителей. В усилителе на трех сердечниках
зависимость![]() имеет
нелинейный
характер.
имеет
нелинейный
характер.
На рис. 25.10 показан однотактный (нереверсивный) трехфазный усилитель, предназначенный для регулирования частоты вращения асинхронного
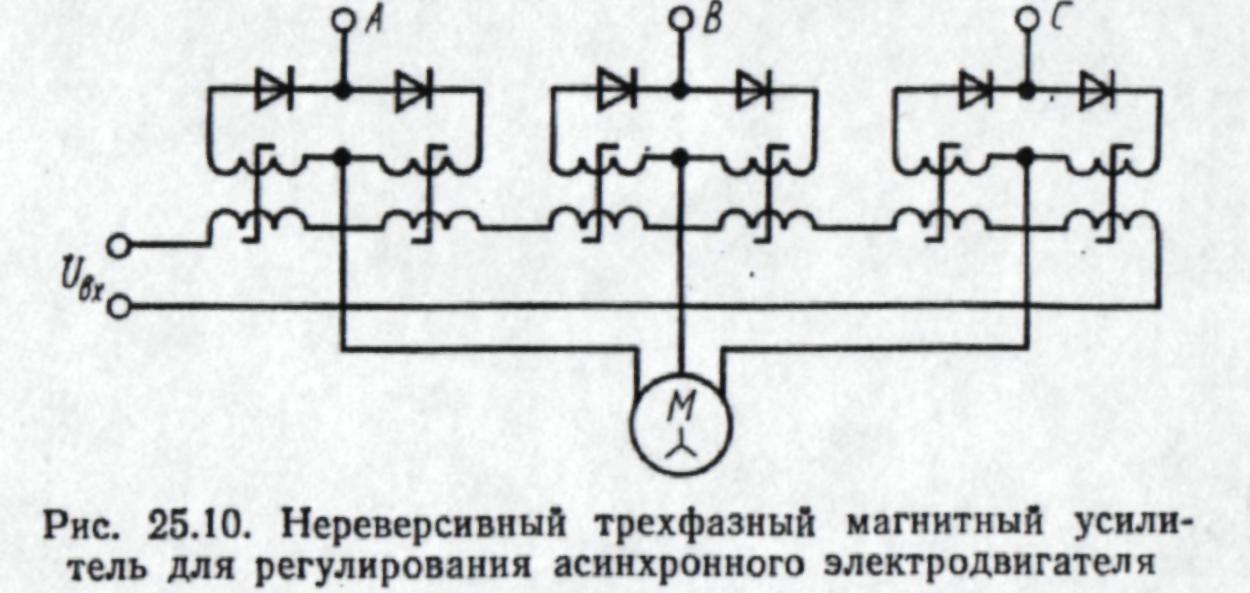
электродвигателя М. Последовательно с каждой фазой обмотки статора двигателя включается однофазный магнитный усилитель. Следовательно, нагрузкой для каждого однофазного усилителя является соответствующая обмотка статора. При этом рабочая обмотка рассчитывается на фазное напряжение. Магнитный усилитель позволяет регулировать напряжение на зажимах статора. При уменьшении напряжения на двигателе снижается его скорость, правда довольно незначительно. Заметим, что для регулирования скорости асинхронного двигателя в широких пределах используются другие схемы (с переключением числа пар полюсов при ступенчатом регулировании, с тиристорными преобразователями частоты питания при плавном регулировании).
Возможно применение трехфазных магнитных усилителей и для автоматизации пуска асинхронных двигателей, когда усилитель включается в комбинации с релейно-контакторной аппаратурой.