

§ 20.5. Автоматические выключатели
Автоматический выключатель предназначен для включения и отключения электрических цепей и электрооборудования, а также для защиты от больших токов, возникающих при коротких замыканиях и перегрузках. В отличие от магнитного пускателя автоматический выключатель не может использоваться для автоматических систем, использующих электрические управляющие сигналы. Он также не обеспечивает реверса электродвигателя. Автоматический выключатель часто используют для продолжительного включения нереверсируемых электродвигателей. Может он также использоваться вместо рубильника в схемах с магнитным пускателем (см. рис. 20.4 и 20.6).
У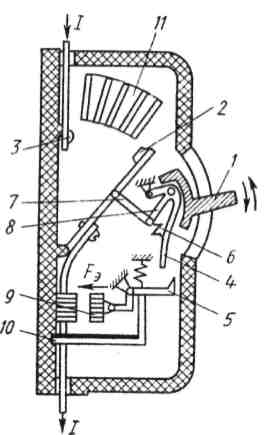 стройство
автоматического воздушного выключателя
(автомата) показано на
рис. 20.7. С помощью рукоятки / производится
включение и отключение автомата. В
состоянии, показанном на рисунке, автомат
отключен, и подвижный контакт 2
не
замкнут с неподвижным контактом 3.
Для
включения автомата следует
взвести пружину 6,
при
этом рукоятка
/ перемещается вниз и поворачивает
деталь 4,
которая
своим нижним концом входит в зацепление
с зубом удерживающего рычага 5.
стройство
автоматического воздушного выключателя
(автомата) показано на
рис. 20.7. С помощью рукоятки / производится
включение и отключение автомата. В
состоянии, показанном на рисунке, автомат
отключен, и подвижный контакт 2
не
замкнут с неподвижным контактом 3.
Для
включения автомата следует
взвести пружину 6,
при
этом рукоятка
/ перемещается вниз и поворачивает
деталь 4,
которая
своим нижним концом входит в зацепление
с зубом удерживающего рычага 5.
Рис.20.7.
Автоматический выключатель
Теперь автомат готов к включению. Для его включения рукоятку 1 перемещают вверх.
Пружина 6 займет такое положение, что шарнирно соединенные рычаги 7 и 8 перемещаются вверх по отношению к тому положению, когда они находятся на одной прямой. Автомат включится: цепь тока создается через контакты 2 и 3, разделители 9 и 10.
Автоматическое
отключение автомата происходит при
срабатывании разделителей. При длительных
токовых перегрузках срабатывает тепловой
биметаллический расцепитесь 10,
свободный
конец, которого перемещается вниз,
поворачивая рычаг 5
по
часовой стрелке. Зуб рычага расцепляется
с деталью 4,
которая
поворачивается, а рычаги 7 и 8
проходят
мертвое положение. Усилие пружины 6
направлено
вниз, под его действием размыкаются
контакты 2
и
3.
Отключение
при максимально допустимом токе
происходит под действием электромагнитной
силы
![]() ,
выводящей зуб рычага 5
из
зацепления с деталью 4.
Если
произошло автоматическое отключение
нагрузки, то рукоятка 1
остается
в верхнем положении. Ручное отключение
автомата происходит при перемещении
рукоятки 1 вниз. Возникающая при размыкании
контактов 2
и
3
электрическая
дуга гасится с помощью дугогасительной
решетки 11.
,
выводящей зуб рычага 5
из
зацепления с деталью 4.
Если
произошло автоматическое отключение
нагрузки, то рукоятка 1
остается
в верхнем положении. Ручное отключение
автомата происходит при перемещении
рукоятки 1 вниз. Возникающая при размыкании
контактов 2
и
3
электрическая
дуга гасится с помощью дугогасительной
решетки 11.
Автоматы могут снабжаться расцепителями минимального напряжения, отключающими автомат при напряжении в сети ниже допустимого значения. Для дистанционного управления автоматическим выключателем могут использоваться специальные их конструкции, дополненные электромагнитным приводом рукоятки 1.
Выпускаемые промышленностью автоматические выключатели типов АК, АП, АЕ имеют от 1 до 3 пар силовых контактов. Они предназначены для цепей с напряжением от 110 до 500 В при токах в десятки ампер. Время автоматического отключения составляет 0,02—0,04 с.
Глава 21
ЭЛЕКТРОМАГНИТНЫЕ ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА