

5. Примеры построения математических моделей колебаний для систем со многими степенями свободы
Рассмотрим математические модели колебаний, составленные с использованием уравнений Лагранжа II рода или принципа Д'Аламбера. Будем считать, что связи в рассматриваемых системах имеют упругое сопротивление и неупругое -соответственно пружины и демпферы, реализующие силы сухого и вязкого трения. Построим математические модели для анализа вынужденных колебаний, что позволяет полнее оценить динамическое воздействие на систему, возникновение опасных ситуаций, безопасность движения. Если система не имеет каких-либо диссипаций энергии, отсутствует гаситель колебаний, то из общей модели можно получить более простые системы.
5.1. Построение математических моделей колебаний для систем с двумя степенями
Представим расчетную схему механической системы в виде рис. 5.1. Два тела совершают колебательные процессы при наличии демпферов, реализующих силы сухого и вязкого трения. Генерирование колебаний происходит за счет воздействия на тела со стороны пути, имеющем неровности.
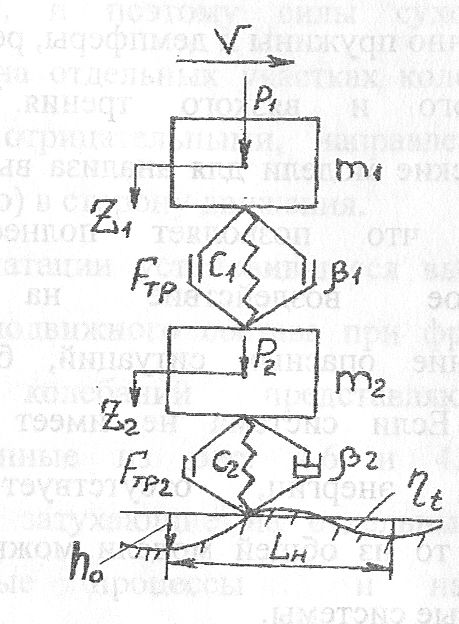
Рис. 5,1 Расчетная схема системы с двумя степенями свободы
Вначале
рассмотрим верхний груз. Если ему дать
малую деформацию вниз, то возникнет
реакция в связи со вторым грузом,
направленная вверх. Аналогично для
второго груза будет действовать одна
реакция со стороны первого груза и
вторая - со стороны рельсового пути,
имеющего неровности
![]()
![]() -амплитуда
неровности (возмущающей функции);
-амплитуда
неровности (возмущающей функции);
![]() -
частота возмущающей функции; 1н
- длина
неровности
-
частота возмущающей функции; 1н
- длина
неровности


Рис 5.2 Силовые схемы двухстепенной системы
Рассмотрим силы, действующие на первый груз: силы инерции Рин1= -mlzl, Р1- сила тяжести (вес)
![]() (5.1)
(5.1)
реакция в связи между первым и вторым грузами.
Тогда дифференциальное уравнение, описывающее колебания верхнего груза будет иметь вид
![]() (5.2)
(5.2)
Аналогично для нижнего груза:
 (5.3)
(5.3)
Тогда дифференциальное уравнение, описывающее колебания второго груза будет иметь вид
![]() (5.4)
(5.4)
или после подстановки в (5.4) значений (5.3) и (5.1) и приведения подобных членов, получим
 (5.5)
(5.5)
Представим силы сухого трения зависящими от прогиба рессорного подвешивания, тогда получим
![]() (5.6)
(5.6)
Тогда система дифференциальных уравнений описывающих колебания грузов, будет иметь вид
![]()
Будем искать
решение системы уравнений на участке
![]() ,
где будем полагать, что
,
где будем полагать, что
![]() ,
то есть после решения системы и вычисления
всех параметров необходимо проверить
знаки сигнатур и исправить их, если
несовпадают.
,
то есть после решения системы и вычисления
всех параметров необходимо проверить
знаки сигнатур и исправить их, если
несовпадают.
При принятых значениях система примет вид
![]()
Разделим первое
уравнение на
![]() и учитывая что
и учитывая что

Разделим второе
уравнение на
![]() и учитывая, что
и учитывая, что
Где
![]() -соответственно
стрелы трения от действующих сил трения
F1
и F2
-соответственно
стрелы трения от действующих сил трения
F1
и F2
![]() -коэффициенты
относительного трения в первой
-коэффициенты
относительного трения в первой
Применим для уравнений расщепление фазовых пространств: перенесем все переменные с z2 в правую часть, скрестно перемножим уравнения, выполним операцию передачи производной (энергетического уровня) и приведем подобные члены. Тогда для автономного дифференциального уравнения, описывающего колебания первого груза на рассматриваемом участке времени, получим выражение
![]() (5.11)
(5.11)
Где приняты обозначения:
Уравнение
является отделившимся, его общее и
частное решение достаточно просто
определяются. Из уравнения видно, что
на рассматриваемом участке колебания
происходят относительно положения,
определяемого величиной
![]()
Уравнение получено в общем виде и если не учитывать силы, сухого и вязкого трения, силу тяжести
![]()
То получим уравнение вида
![]() (5.12)
(5.12)
Рассмотрим общее решение уравнения (5.12), для чего, полагая z1 = Aekl, дифференцируя его четыре раза, затем, сокращая на Aekl≠0 получим характеристическое уравнение в виде
![]()
Найдем корни уравнения
![]()
Как видно из частоты собственных колебаний не зависят от начальных условий задачи и определяются только параметрами системы. Анализируя корни уравнения , можно отметить, что они имеют мнимые части и, следовательно, круговые частоты. Поэтому движение груза представляет собой периодические колебания с определенной круговой частотой.
Для
оценки вынужденных колебаний (5.11), примем
![]() .
Тогда
.
Тогда
![]() ,
,
![]() и
уравнение (5,11) будет иметь вид
и
уравнение (5,11) будет иметь вид
![]() (5,15)
(5,15)
Пусть неровность является длинной, собственные колебания успевают затухнуть, а имеют место установившиеся вынужденные колебания. Тогда для вынужденных колебаний будем искать частное решение уравнения (5.15) в виде
=const и движение происходит на рассматриваемом отрезке времени.
Дифференцируя
выражение (5.16) четыре раза, подставляя
полученные уравнения в (5.15), группируя
коэффициенты соответственно при
![]() и
и
![]() ,
затем
сокращая на
≠0 и
≠0,
окончательно
для вынужденных колебаний найдем
,
затем
сокращая на
≠0 и
≠0,
окончательно
для вынужденных колебаний найдем
 (5,17)
(5,17)
Вычислив значения D и E, мы нашли частное решение уравнения (5,15) для рассмотренного отрезка времени в виде (5.16). Зная решения для Z1 и подставляя его, например, в первое уравнение системы (5.9), аналогично найдём решения для z2.
Таким образом, мы нашли решения для исходной системы. Зная z1 z2, ηt продифференцировав их, найдем значения сигнатур sign(z1-z2) и sign(z1- ηt). Если найденные знаки отличаются от принятых нами в начале, то в полученных решениях перед φ и fтп соответственно необходимо изменить знак.
Найденные аналитические решения позволяют дать полный анализ происходящему колебательному процессу, рассмотреть зоны затухающих колебаний и участки, где происходит генерирование амплитуд. Решение позволяет рассматривать широкий круг задач при различных возмущающих функциях и силах диссипации энергии.
Динамические силы в системе, их максимальные значения, приводящие к возникновению опасных ситуаций, угрожающих безопасности движения, соответственно определяются из выражений (5.1) и (5.3).
Рассмотрим теперь двухстепенную систему, имеющую кроме линейных, как было показано выше, угловые перемещения. На рис. 5.3 представлена расчетная схема экипажа.
Пусть система движется слева направо и в связях кузова реализуются упругие и диссипативные (сухого и вязкого трения) силы.
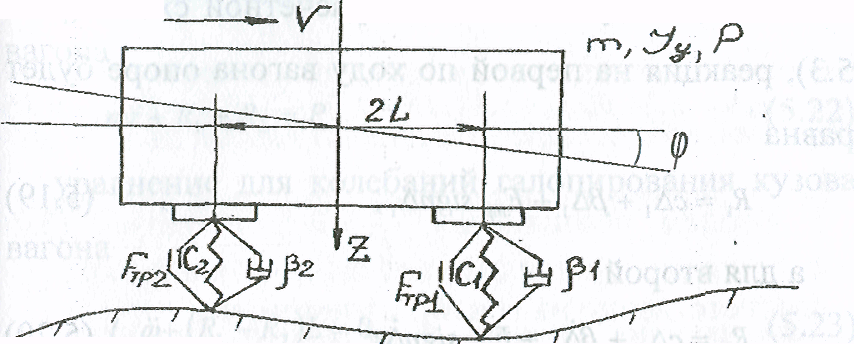
Рис. 5.3 Расчетная схема системы с 2-мя степенями свободы, линейными и угловыми координатами.
Следует
отметить, что обычно в таких конструкциях
βl=β2=β
cl=c2=c
так
как кузов в конструктивном
исполнении
является
симметричным. Неровность пути
![]() под
каждым колесом будет иметь сдвиг по
длине
под
каждым колесом будет иметь сдвиг по
длине
![]()
![]()
В общем случае согласно расчетной схеме реакция на первом по ходу вагона опоре будет равна

Уравнение для колебаний подпрыгивания кузова вагона
![]()
Уравнение для колебаний галопирования кузова вагона
![]()
Где
![]() -
физический момент инерции кузова вагона
-
физический момент инерции кузова вагона
Будем искать решение уравнений на участке , где будем полагать ,что
![]()
то есть в выражениях перед силами трения надо поставить знак минус.
После решения системы и вычисления всех параметров необходимо проверить правильность принятых значений сигнатур и исправить их, если есть несовпадения.
С учетом сказанного система будет иметь вид
Введем обозначение
 сократим соответственно на m
b
m11
c
учетом, что
сократим соответственно на m
b
m11
c
учетом, что
 (5,25)
(5,25)
Из
уравнений (5.25) видно, что при
![]() каждое
уравнение становится автономным. Но
такой вид колебательного процесса
возможен при равенстве постоянных
значений сил трения F,
=F2,
каждое
уравнение становится автономным. Но
такой вид колебательного процесса
возможен при равенстве постоянных
значений сил трения F,
=F2,
Применив правило расщепления пространств или исключения переменных, можно определить из первого уравнения (5.25) угол галопирования кузова, продифференцировать два раза и подставив во второе уравнение (5.25), получим автономное уравнение для колебаний подпрыгивания кузова вагона.
Так
как в железнодорожных экипажах обычно
![]() то есть
то есть
![]()
И
![]() то система уравнений разделяется на
автономные уравнения
то система уравнений разделяется на
автономные уравнения

Анализируя
однородные уравнения приходим к выводу,
что их левые части идентичны и
колебательные процессы на стадии
затухания и генерирования амплитуд
колебаний в основном определяются
величинами
![]() .
Колебания
подпрыгивания происходят (при малых
сопротивлениях движению) соответственно
относительно положения
.
Колебания
подпрыгивания происходят (при малых
сопротивлениях движению) соответственно
относительно положения
С учетом получим
Будем искать частное решение первого неоднородного уравнения для оценки вынужденных колебаний подпрыгивания кузова вагона в виде

Продифференцируем два раза и подставим в уравнение с учетом правой части, тогда найдем
 (5,30)
(5,30)
Следовательно, для оценки амплитуд вынужденных колебаний подпрыгивания кузова вагона выражение будет иметь вид с учетом
Обозначим
 тогда
получим
тогда
получим
 (5.31)
(5.31)
Уравнение
(5.31) показывает, что на рассматриваемом
отрезке времени колебания подпрыгивания
происходят с максимальной амплитудой
М
относительно
положения, определяемого последним
членом уравнения (5.31). Колебания происходят
со сдвигом по фазе на величину
![]() .
При этом колебания на одних участках
затухают, а на других - наоборот нарастают.
.
При этом колебания на одних участках
затухают, а на других - наоборот нарастают.
Так и получаются установившиеся вынужденные колебания. Аналогично находится решение для второго уравнения (5.26), где учитываются решения (5.18) и тогда
![]()
Вычислив z и φ, определяют
![]() и
и
![]() и если эти значения совпадают с принятыми
нами ранее, то значения перед
и если эти значения совпадают с принятыми
нами ранее, то значения перед
![]()
![]() и
и
![]()
Оставляют, а если знаки не совпадают, то в этом случае изменяют на обратный перед теми выражениями, где это произошло.