

11.2. Экспериментальная часть
1) Ознакомиться с рабочим местом, паспортом испытуемого двигателя, схе-мой включения.
2) Собрать, если необходимо, экспериментальную схему, приведенную на рис. 35.
3) Снять естественные (при Rд = 0) внешние (скоростные) характеристики n = f(Iа) при полном возбуждении (ПВ) (β = 1) и двух режимах ослабления возбуждения (ОВ1, ОВ2).
4) Снять реостатную (при Rд = 0) внешнюю характеристику при любом из названных выше режимов.
5) Произвести измерения сопротивлений участков цепи (rа, rв, rш, Rд), если они не указаны на лабораторном стенде.
11.3. Расчеты и построения
1) Построить в одних координатах все внешние характеристики.
2) Рассчитать и построить в одних координатах моментные характеристики M = f(Iа) экспериментальных режимов.
3) Построить механические характеристики n = f(M) для режимов ПВ и ОВ (при Rд = 0).
4) Рассчитать коэффициенты ослабления возбуждения по уравнениям (43) или (44).
5) Оформить отчет и привести ответы на контрольные вопросы.
11.4. Методические указания
В учебных лабораториях для испытаний предлагаются двигатели стрелочных переводов. Отличительной особенностью их является высокое сопротивление обмотки якоря, что в принципе позволяет включать двигатели без пусковых реос-татов. На приведенной схеме (рис. 35) резистор Rд играет роль регулировочного реостата, хотя может быть использован и как пусковой.
Каждый двигатель сочленен с другим подобным себе, который в данном случае используется в качестве нагрузочного генератора. При сборке схемы со-едините вывод Яоб второй машины с нагрузочным реостатом. Другой зажим ре-остата соедините с любым из выводов С. Если при включении испытуемого дви-гателя нагрузочный генератор не возбуждается, остановите машину, подключите нагрузочный реостат к другому зажиму С и вновь запустите двигатель. Возбужда-ется или не возбуждается генератор, легко определить, включая одну–две ступени нагрузочного реостата.
Для оценки частоты вращения с валом испытуемого двигателя соединен та-хогенератор (ТГ). Если ТГ постоянного тока, то к его выводам необходимо под-ключить вольтметр на 150–300 В постоянного тока. Синхронные тахогенераторы имеют собственную стрелочную индикацию.
Внешние характеристики рекомендуется начинать снимать с наибольшей частоты вращения – нагрузочный реостат полностью отключен. Затем поочередно включаются все ступени реостата. Результаты замеров заносятся в табл. 18.
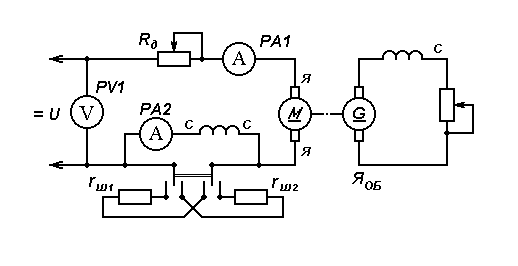
Рис. 35
При необходимости введения добавочного сопротивления в цепь якоря (Rд = 0) поставьте движок резистора Rд в любое положение и больше не изменяйте его до конца работы. После разборки схемы замерьте сопротивление рабочей части Rд измерительным мостом или по способу амперметра и вольтметра (рис. 36). Резистор R в данном случае необходим для ограничения тока.
Рассчитать величину электромагнитного момента можно по выражению, Н∙м:
![]() (45)
(45)
где Eа = U – IаRа.
В свою очередь сопротивление цепи якоря, Ом,
![]() (46)
(46)
Механические характеристики n = f(M) легко построить по данным табл. 18. Всего в табл. 18 должно входить пять режимов.
Табл. 19 заполняется на основании имеющихся данных или произведенных измерений. Сопротивления rш1 и rш2 соответствует режимам ОВ1 и ОВ2.
Таблица 18
Таблица экспериментальных и расчетных данных
Режим, β, Ra |
Опыт |
Расчет |
||||
U, B |
Ia, A |
Iв, A |
n, об/мин |
Ea, B |
M, Н∙м |
|
ПВ β =1 Ra = Rд = 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
ОВ1 β = Ra = Rд = 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и т. д. |
|
|
|
Таблица 19