

Лабораторная работа №2 «иследование индуктивного преобразователя»
Введение
Задачей работы является снятие характеристик дифференциального индуктивного преобразователя малых перемещений и неуравновешенного моста, в который обычно включается индуктивный преобразователь. С помощью моста и фазочувствительного измерителя входная величина преобразователя (перемещения) преобразуется в выходную электрическую величину – постоянный ток.
Принцип действия индуктивного преобразователя.
Устройство дифференциального индуктивного преобразователя показано на Рисунке1
Два магнитопровода состоят из Iа, Iб и якоря 2, выполненных из магнитомягкого материала. Между сердечником и якорем имеются малые воздушные зазоры δ1 и δ2. на каждый магнитопровод надета обмотка с числом витков W, обычно состоящих из двух катушек.
При исходном значении измеряемой величины якорь преобразователя занимает семеричное по отношению двух сердечников положение δ1= δ2= δ0. Преобразуемое перемещение будем далее обозначать символом ∆δ. При перемещении якоря длина одного из воздушных зазоров увеличивается, другого – уменьшается. При этом изменяется магнитные потоки ф1 и ф2 в сердечниках Ia и Iб, индуктивности обмоток L1 и L2, а так же активные сопротивление r1 и r2. Изменение величины r1 и r2 обусловлено нелинейностью зависимостей потерь на гистерезис и вихревые токи от величины магнитных потоков ф1,ф2.
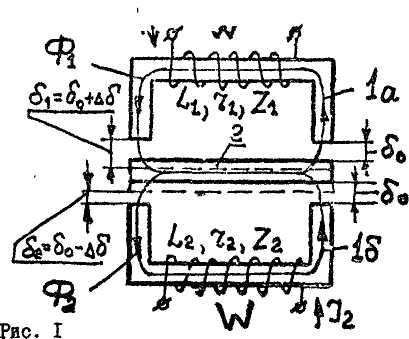

Рисунок 1
Заметим, что изменения L и r для одной обмотки имеют одинаковые знаки. При перемещении якоря L1 и L2, а так же r1 и r2 изменяются в разные стороны. Итак, в преобразователе перемещение якоря ∆δ преобразуется в изменение комплексного сопротивление обмоток Z1 = r1+jwL1 и Z2 = r2+jwL2
3. Характеристики преобразователя
Основными характеристиками преобразователя являются зависимости сопротивлений rl, r2, X1=WL1, X2=WL2, Z1, Z2 от положения якоря, определяемого величиной ∆δ. Перечисленные характеристики можно получить многими способами. В работе этой цепи предлагается использовать фазочуствительный измеритель. На практике изменение активного сопротивления ∆r обмоток может оказаться незначительным по сравнению с изменением индуктивного сопротивления ∆х.
Сопротивления обмоток преобразователя Z1 и Z2 нельзя считать строго линейными, т.е. независимыми от величины напряжения питания.
Нелинейность сопротивления обусловлена нелинейностью характеристики В = f(II) материала сердечника. В связи с этим при работе с индуктивным преобразователем необходимо поддерживать постоянной величину напряжения на его обмотках.
Заметим еще, что две половины дифференциального преобразователя не являются строго идентичными и в некотором положении якоря, при котором Х1=Х2, r1 может отличаться от r2.
4. Фазочувствительный измеритель.
В работе для получения всех нужных характеристик применен фазочувствительный измеритель. Он состоит из фазочувcтвительного усилителя – выпрямителя (УВ) и магнитоэлектрического микроамперметра, подключаемого к выходным зажимам 2-2'У В (Рисунок 2)
Измеряемое напряжение Ůx, подводится к зажимам I-I', управляющее (опорное) напряжение Ůy подводится к зажимам 3-3`. Отклонение стрелки прибора α, пропорциональное Icp – среднему значению тока в его рамке, как известно, зависит от угла сдвига фаз между напряжениями Ůx, и Ůy и не меняется при небольших изменениях величины управляющего напряжения Ůy.

Рисунок2
Имеет место следующее соотношение:
A = S*Icp = Sф*Ux*cosφ , (1)
где S – чувствительность прибора к току;
Sф – чувствительность фазочувcтвительного измерителя к напряжению на его входе;
ф – фазовый сдвиг между векторами напряжений Ůx и Ůy; при ф=0, U=Sφ*Ux,
при
![]() ,
a=0
,
a=0
При использовании фазочувствительного измерителя для измерения активного и реактивного сопротивления должна быть обеспечена возможность регулировки фазы, управляющего напряжения Ůy в пределах, превышающих 90 градусов, причем его величина должна оставаться при всех значениях фазовых углов приблизительно постоянной, для этого используется специальная фазорегулирующая цепь (ФР), показанная на Рисунке З.
Здесь приведена схема усилителя – выпрямителя. Входные зажимы фазорегулирующей цепи 3 – 3' присоединяются к зажимам генератора переменного тока (ЗГ). На выходных зажимах фазорегулирущий образуется напряжение Ůy.

Рисунок 3
В качестве фазового регулятора
используется мост, два плеча которого
предоставляют собой вторичную обмотку
трансформатора Тр1, а два другие
плеча включены конденсатор С1 и
переменное сопротивление R7. Как
известно, если сопротивление нагрузки,
присоединенное к выходной диагонали
моста очень велико по сравнению с
сопротивлением плеч моста, то изменение
сопротивления R7 вызывает изменение
фазы напряжения Uy, не вызывая при
этом изменения его значения. При R7=0
или R7=бесконечности
Uy находится в фазе или противофазе
с напряжением питания моста Uпит.
При
![]() сдвиг фаз между Uпит и Uy
равен
сдвиг фаз между Uпит и Uy
равен
![]() .
.
Чтобы нагрузка фазорегулятора не влияла на величину его выходного напряжения, к выходным зажимам моста подключён эмиттерный повторитель на транзисторе Т1.