

ЛАБОРАТОРНАЯ РАБОТА 1-4
.docЛАБОРАТОРНАЯ РАБОТА 1-4
ИЗУЧЕНИЕ ЗАКОНОВ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
1.ЦЕЛЬ РАБОТЫ: определение момента инерции маятника Обербека и исследование законов вращательного движения.
2.ПРИБОРЫ И ПРИНАДЛЕЖНОСТИ: маятник Обербека, грузы, штангенциркуль, масштабная линейка, секундомер.
3.МЕТОД ИЗМЕРЕНИЙ: прямые измерения высоты и времени падения груза, радиуса шкива позволяют вычислить момент внешней силы, угловое ускорение, момент инерции маятника Обербека и установить закон вращательного движения.
4. ВВЕДЕНИЕ.
Законы вращательного движения можно изучать при помощи прибора (маятника Обербека), изображенного на рис. 1.
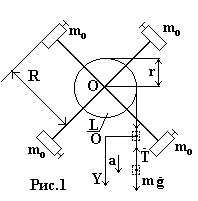
Прибор состоит из шкива L радиуса r, закрепленного на оси О, четырех стержней, расположенных под углом 90 друг к другу, и четырех одинаковых цилиндрических грузов m0, которые можно перемещать вдоль стержней и закреплять на определенном расстоянии от оси. Грузы закрепляются симметрично, т.е. так, чтобы центр их тяжести совпадал с осью вращения. Прибор приводится во вращательное движение грузом P, прикрепленным к концу шнура, навитого на шкив. Груз P, удерживаемый на высоте h над полом, обладает потенциальной энергией m1gh, где m1 – масса груза, g – ускорение свободного падения.
Если предоставить
возможность грузу P
падать, то это падение будет происходить
с ускорением a.
При этом шкив со стержнями и расположенными
на нем грузами будет вращаться с угловым
ускорением .
При падении груза P
потенциальная энергия Eп
= mgh,
переходит в кинетическую энергию
поступательного движения груза Eп
=
![]() и кинетическую энергию
и кинетическую энергию
Eкв
=
![]() вращательного движения прибора.
вращательного движения прибора.
На основании закона сохранения механической энергии можно записать
m1gh
=
![]() +
+
![]() ,
(1.4.1)
,
(1.4.1)
где v – скорость груза P в момент касания пола;
- угловая скорость вращающейся части прибора;
I – момент инерции крестовины маятника Обербека относительно оси вращения.
Сила, под действием которой груз m1 падает вниз
F = P – T,
где – P – сила тяжести; T – сила натяжения шнура.
Отсюда
T = P – F
или
T = m1g – m1a = m1(g-a) (1.4.2)
Сила T сообщает угловое ускорение вращающемуся телу. Момент этой силы
M = Tr = m1(g-a), (1.4.3)
где r – радиус шкива.
Так как движение груза равноускоренное, то ускорение его с учетом начальных условий (t = 0; y0 = 0; v0y = 0) будет равно
a=
![]() (1.4.4)
(1.4.4)
С другой стороны, на основании основного закона динамики вращательного движения маятника вокруг неподвижной оси можно написать
M = I, (1.4.5)
где - угловое ускорение маятника. Оно равно
=
![]() (1.4.6)
(1.4.6)
Из формул (1.4.5),(1.4.3),(1.4.6) находим
I
=
 (1.4.7)
(1.4.7)
Для определения момента инерции I нужно определить опытным путем все величины, стоящие в правой части уравнения (1.4.7); ускорение свободного падения g = 9,8 м/с2.
5. ПРОВЕДЕНИЕ ЭКСПЕРИМЕНТА И ОБРАБОТКА ОПЫТНЫХ ДАННЫХ.
5.1. Определение момента инерции.
5.1.1. Цилиндрические подвижные грузы m0 закрепляются как можно ближе к оси вращения, но так, чтобы крестовина была в безразличном равновесии.
5.1.2. Измеряется штангенциркулем диаметр большого шкива (2r).
5.1.3. На технических весах определяется масса m1 груза P (с точностью до 0,5г).
5.1.4. На шкив наматывается нить, на конце которой прикреплен груз P так, чтобы он был на высоте h над уровнем пола. Масштабной линейкой измеряют величину h.
5.1.5. Предоставив возможность грузу P падать, по секундомеру определяют время t его падения. Секундомер включают в момент начала движения груза и останавливают одновременно с ударом груза об пол. Всего проводится 5 опытов с грузами различных масс.
5.1.6. Проводят аналогичные опыты при расположении подвижных цилиндрических грузов на концах стержней.
Результаты измерений и вычислений заносят в таблицу 1.
Таблица 1
|
№ опыта |
m1 кг |
r м |
h м |
t c |
Ii
= mr2 кгм2 |
Схема расположения цилиндрических грузов |
|
1 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
5 |
|
|
|
|
|


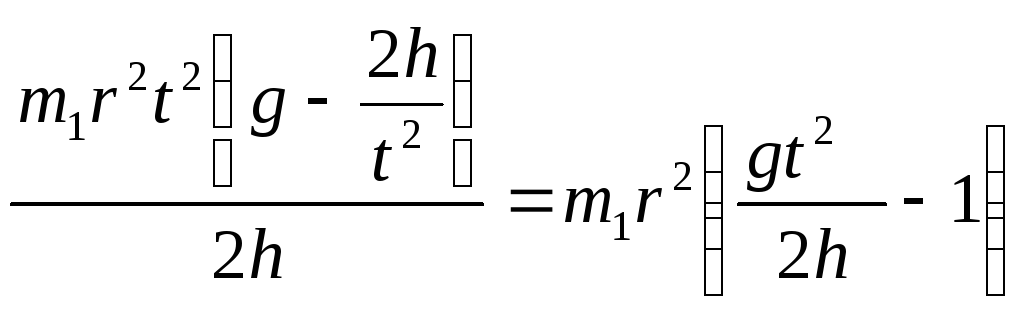
5.1.7. Вычисление абсолютной и относительной погрешности результатов косвенных измерений момента инерции. Расчетная формула имеет вид:
I = m1r2![]() ,
,
где I = I(m, r, t, h).
Найдем суммарную относительную погрешность результата
I
=
![]() ,
(1.4.8)
,
(1.4.8)
где Iс – относительная систематическая погрешность,
I - относительная случайная погрешность.
а) Прологарифмируем выражение для I
ln I = ln m1 + 2ln r + ln (gt2 – 2h) – ln 2h;
б) возьмем дифференциал натурального логарифма и сгруппируем члены, содержащие одинаковый дифференциал (выражения в скобках, стоящие перед дифференциалом, берут по модулю)

в) заменив знак d на и минус перед дифференциалом на плюс, получим
Ic
=
![]() (1.4.9)
(1.4.9)
Здесь m1, r, t, h - абсолютные погрешности измерительных приборов (m = 510-4 кг, r = 110-4 м, h = 510-4 м, t = 0,1 c).
Относительную случайную погрешность найдем по формуле, используя опытные данные:
I
=
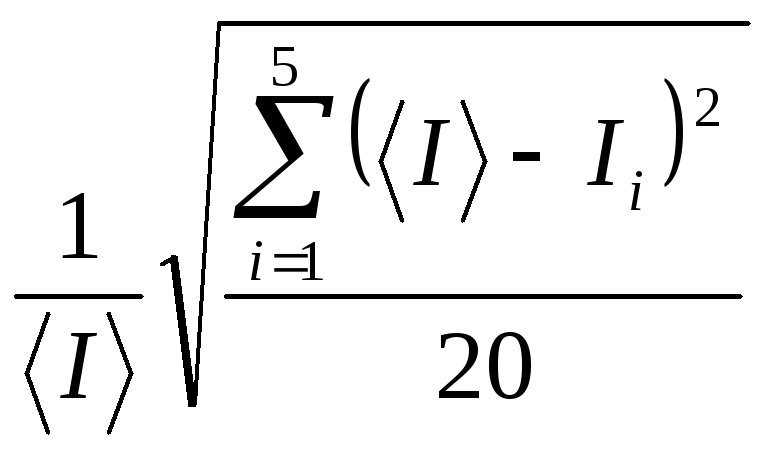 .
(1.4.10)
.
(1.4.10)
Подставляя вычисленные значения I и Iс в формулу (1.4.8), найдем суммарную относительную погрешность измерения I. Абсолютная погрешность равна
I = II
5.2. Исследование законов вращательного движения.
5.2.1. Измеряют штангенциркулем диаметр малого шкива (2r).
5.2.2. Наматывают на шкив нить, на конце которой прикреплен груз P так, чтобы он был на высоте h над уровнем пола. Масштабной линейкой измеряют величину h.
5.2.3. Предоставив возможность грузу P падать, по секундомеру определяют время падения. Секундомер включают в момент начала падения груза и останавливают одновременно с ударом груза об пол.
По формулам (1.4.4) и (1.4.6) вычисляют угловое ускорение, а затем, используя формулу (1.4.5) и найденное значение момента инерции маятника при соответствующем расположении цилиндрических грузов на стержнях, определяют момент внешней силы, действующей на систему.
Результаты измерений записывают в таблицу 2.
Таблица 2
|
№ опыта |
mi
кг |
r
м |
h
м |
t
с |
= рад/с2 |
I
кгм2 |
Mi
нм |
|
1 |
|
|
|
|
|
|
|
5.2.4. Вычислите погрешности однократного косвенного измерения величины М.
Найдем относительную погрешность М:
=
![]()
где I - относительная погрешность момента инерции, ее нужно взять из пункта 4.1.7.
Относительную погрешность измерения найдем по формуле
()
=
![]()
Абсолютная погрешность величины М равна
М = M
6. КОНТРОЛЬНЫЕ ВОПРОСЫ.
6.1. Сформулируйте основной закон динамики вращательного движения твердого тела вокруг неподвижной оси.
6.2. Что такое момент силы относительно точки и от чего зависит величина момента инерции тела?
6.3. Сформулируйте теорему Кенига.
6.4. Сформулируйте закон сохранения момента импульса.
7. ЛИТЕРАТУРА.
7.1. Савельев И.В. Курс общей физики. Т.1. Механика. Молекулярная физика. М.: Наука. 1982. – 482 с. §§ 38, 39, 41, 42.
7.2. Сивухин Д.В. Общий курс физики. Т.1. Механика. М.: Наука. 1989. – 576 с. §§ 30, 32, 33, 34, 35.