

УРАВНЕНИЕ ЛИНИИ НА ПЛОСКОСТИ. УРАВНЕНИЯ ПОВЕРХНОСТИ И ЛИНИИ В ПРОСТРАНСТВЕ
Лекция 5
Рассмотрим один из важнейших вопросов аналитической геометрии — вопрос об аналитическом представлении линии на плоскости и поверхности и линии в пространстве при помощи уравнений, связывающих их координат, а также простейшие задачи, связанные с таким аналитическим представлением. Приведем классификацию плоских линий и поверхностей. Докажем, что порядок алгебраической линии (и соответственно поверхности) не зависит от выбора декартовой прямоугольной системы координат.
5.1. Уравнение линии на плоскости
Предположим,
что на плоскости
заданы декартова прямоугольная система
координат Оху
и некоторая
линия L.
Рассмотрим
уравнение, связывающее две переменные
величины
 .
.
 (5.1)
(5.1)
Определение. Уравнение (5.1) называется уравнением линии L (относительно заданной системы координат), если этому уравнению удовлетворяют координаты х и у любой точки, лежащей на линии L, и не удовлетворяют координаты х и у ни одной точки, не лежащей на линии L.
С точки зрения этого определения сама линия L представляет собой (в заданной системе координат) геометрическое место точек, координаты которых удовлетворяют уравнению (5.1)
Если в заданной системе координат уравнение вида (5.1) является уравнением линии L, то говорят, что это уравнение определяет линию L.
Замечание.
Нетрудно
указать такое уравнение вида (5.1), которое
либо определяет геометрический образ,
отличный от того, что
мы привыкли понимать под термином
«линия», либо вообще не определяет
никакого геометрического образа. Так,
уравнение
 определяет на плоскости Оху
лишь
одну точку (0,0), а уравнение
определяет на плоскости Оху
лишь
одну точку (0,0), а уравнение
 вообще не определяет никакого
геометрического
образа. Для того чтобы уравнение вида
(5.1) определяло геометрический образ,
отвечающий нашему привычному представлению
о линии, следует подчинить функцию
Ф(х,у) некоторым
ограничениям (например, требованию
однозначной разрешимости уравнения
(5.1) относительно одной из переменных).
вообще не определяет никакого
геометрического
образа. Для того чтобы уравнение вида
(5.1) определяло геометрический образ,
отвечающий нашему привычному представлению
о линии, следует подчинить функцию
Ф(х,у) некоторым
ограничениям (например, требованию
однозначной разрешимости уравнения
(5.1) относительно одной из переменных).
Пример. Уравнение

является
уравнением
окружности радиуса
 с центром в точке М0(а,
b).
В
самом деле, точка М(х,
у) лежит
на указанной окружности
тогда и только тогда, когда расстояние
между точками М(х,
у) и М0(а,
b)
равно
с центром в точке М0(а,
b).
В
самом деле, точка М(х,
у) лежит
на указанной окружности
тогда и только тогда, когда расстояние
между точками М(х,
у) и М0(а,
b)
равно
 ,
т.е. тогда и
только тогда, когда квадрат расстояния
между указанными точками
,
т.е. тогда и
только тогда, когда квадрат расстояния
между указанными точками
 равен
равен
 .
Таким образом,
координаты любой точки М(х,у),
лежащей
на указанной окружности, удовлетворяют
уравнению (5.2), а координаты любой точки,
не лежащей на указанной окружности,
не удовлетворяют уравнению (5.2).
.
Таким образом,
координаты любой точки М(х,у),
лежащей
на указанной окружности, удовлетворяют
уравнению (5.2), а координаты любой точки,
не лежащей на указанной окружности,
не удовлетворяют уравнению (5.2).
Уравнение окружности радиуса с центром в начале координат имеет более простой вид, а именно
 (5.3)
(5.3)
Параметрическое представление линии. Для аналитического представления линии L часто бывает удобно выражать переменные координаты х и у точек этой линии при помощи третьей вспомогательной переменной (или параметра) t:
 (5.4)
(5.4)
где функции
 предполагаются непрерывными по параметру
t
в некоторой
области изменения этого параметра.
предполагаются непрерывными по параметру
t
в некоторой
области изменения этого параметра.
Исключение из двух уравнений (5.4) параметра t приводит к рассмотренному выше уравнению вида (5.1).
Параметрическое представление линии на плоскости естественно возникает, если эту линию рассматривать как путь, пройденный материальной точкой, непрерывно движущейся по определенному закону. В самом деле, если переменная t представляет собой время, отсчитываемое от некоторого начального момента, то задание закона движения и представляет собой задание координат х и у движущейся точки как некоторых непрерывных функций времени t.
Пример
1.
Установим параметрические уравнения
окружности радиуса
с центром в начале координат. Пусть М(х,
у) — любая
точка этой окружности, а
 угол между радиусом-вектором ОМ
и осью Ох,
отсчитываемый
против часовой стрелки (см. рис.). Очевидно,
что
угол между радиусом-вектором ОМ
и осью Ох,
отсчитываемый
против часовой стрелки (см. рис.). Очевидно,
что
 (5.5)
(5.5)
Уравнения (5.5) и
представляют собой параметрические
уравнения рассматриваемой окружности.
Параметр t
может
принимать любые значения, но для того,
чтобы точка М(х,
у) один раз
обошла окружность, следует ограничить
область изменения параметра
полусегментом
 . Заметим,
что для исключения параметра t
из уравнений
(5.5) достаточно возвести в квадрат и
сложить эти уравнения; мы получим при
этом уравнение (5.3).
. Заметим,
что для исключения параметра t
из уравнений
(5.5) достаточно возвести в квадрат и
сложить эти уравнения; мы получим при
этом уравнение (5.3).

Замечание. Часто линию L определяют не уравнением (5.1), а разрешенным (например, относительно у) уравнением
y=f(x). (5.6)
Это уравнением представляет собой частный случай параметрического определения этой линии (при x=t, у = f (t)).
Вид уравнения линии L зависит не только от вида самой линии L, но и от выбора системы координат. Уравнение линии меняется как при переходе от одной декартовой системы координат к другой, так и при переходе от декартовых к каким-нибудь другим координатам.
Если (5.1) представляет собой уравнение линии L относительно декартовой прямоугольной системы координат Оху, то, чтобы получить уравнение той же линии L относительно другой системы координат, достаточно подставить в (5.1) на место х и у их выражения через новые координаты.
Так, например, линия L, определяемая в декартовой системе Оху уравнением (5.1), в полярной системе координат будет определяться уравнением

где введено обозначение Ф1(ρ, φ) = Ф (ρ cos φ, ρsin φ).
Использование для определения некоторых линий недекартовых систем координат объясняется тем, что уравнение линии имеет при этом более простой вид.
В связи с аналитическим представлением линии возникают задачи двух типов. Задачи первого типа заключаются в изучении свойств линии при помощи заранее данного уравнения этой линии. Такое изучение проводится средствами математического анализа.
Задачи второго типа заключаются в выводе уравнения линии, заранее заданной геометрически (например, линии, заданной как геометрическое место точек, удовлетворяющих некоторым условиям).
Исходя из аналитического представления линий в декартовых прямоугольных системах координат, устанавливают следующую классификацию плоских линий.
Определение. Линия называется алгебраической, если в некоторой декартовой прямоугольной системе координат она определяется уравнением
(5.1)
в котором функция Ф (х, у) представляет собой алгебраический полином (сумму конечного числа слагаемых вида аklхkуl, где к и l — целые неотрицательные числа, аkl — некоторые постоянные).
Определение. Всякая неалгебраическая линия называется трансцендентной.
Определение. Алгебраическая линия называется линией порядка п, если в некоторой декартовой прямоугольной системе координат эта линия определяется уравнением (5.1), в котором функция Ф (х, у) представляет собой алгебраический полином п-й степени.
Иными словами, линией п-го порядка называется линия, определяемая в некоторой декартовой прямоугольной системе алгебраическим уравнением степени п с двумя неизвестными.
Для корректности последних трех определений необходимо доказать следующее утверждение.
Теорема 5.1. Если линия в некоторой декартовой прямоугольной системе координат определяется алгебраическим уравнением степени п, то эта линия и в любой другой декартовой прямоугольной системе координат определяется алгебраическим уравнением той же степени п.
Примером алгебраической линии второго порядка может служить окружность (уравнение (5.3) которой в некоторой декартовой прямоугольной системе является алгебраическим уравнением второй степени).
Замечание. Будем называть алгебраическую линию L распадающейся, если алгебраический полином Ф (х, у) степени п ≥ 2, стоящий в левой части уравнения этой линии, распадается на произведение Ф1(х, у) · Ф2(х,у) двух алгебраических полиномов Ф1(х,у) и Ф2(х,у) степеней к≥ 1 и п - к≥ 1, соответственно.
Из равенства Ф(х, у) = Ф1(х, у) · Ф2(х, у) очевидно, что координаты х и у точки М удовлетворяют уравнению Ф(х,у) = 0 тогда и только тогда, когда эти координаты удовлетворяют хотя бы одному из уравнений Ф1(х, у) = 0 или Ф2(х, у) = 0. Это означает, что линия L, определяемая уравнением Ф(х,у)=0, распадается на две линии: линию L1, определяемую уравнением Ф1(х, y) = 0, и линию L2, определяемую уравнением Ф2(х, у) = 0.
Так, линия четвертого порядка, определяемая уравнением
х4 + y4 + 2х2у2 – 5x2 - 5у2 + 4 = (х2 + у2 - 1) (х2 + у2 - 4) = 0,
распадается на две окружности, определяемые уравнениями х2 + у2 - 1 =0 и х2 + у2 - 4 = 0.
Линия четвертого порядка, определяемая уравнением
х4 + у4 + 2x2 у2 - 2х2- 2у2 + 1=(х2 + у 2- 1)2 = 0,
распадается на две «слившиеся» окружности, определяемые уравнением второго порядка х2 + у2 - 1 = 0. В отношении этой последней линии следует договориться, какое из чисел 2 или 4 мы будем понимать под ее порядком.
Важную роль в аналитической геометрии играет задача о нахождении точек пересечения двух произвольных линий L1 и L2, определяемых уравнениями Ф1(х,y) = 0 и Ф2(х,y) = 0, соответственно. Так как искомые точки пересечения в случае, если они существуют, должны одновременно лежать как на линии L1, так и на линии L2, то координаты этих точек должны удовлетворять каждому из уравнений Ф1(х,y) = 0 и Ф2(х,у) = 0.
Таким образом, для нахождения координат всех точек пересечения следует решить систему уравнений
Ф1(х, у) = 0, Ф 2(х,у) = 0. (5.7)
Каждое решение системы (5.7) определяет точку пересечения линий L1 и L2. Если система (5.7) не имеет решений, то линии L1 и L2 не пересекаются.
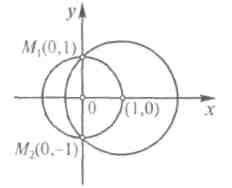
Так, для нахождения точек пересечения двух окружностей, определяемых уравнениями х2 + у2 = 1 и (х- 1)2 + у2 = 2, решаем систему уравнений
х2 + у2-1=0, (х-1)2+у2-2 = 0. (5.8)
Вычитая из первого уравнения (5.8) второе, получим 2х = 0, откуда х = 0. Вставляя это значение х в первое уравнение, найдем, что у=±1. Получаем две точки пересечения М1(0, 1) и М2(0,-1) (см. рис. ).
Замечание. Если L1 и L2 — две нераспадающиеся алгебраические линии порядков т и n соответственно и если одна из этих линий не содержится целиком в другой, то эти линии имеют не более чем т× п точек пересечения.