

ЛАБОРАТОРНА РОБОТА №1
РЕГУЛЮВАННЯ КУТОВОЇ ШВИДК0СТІ ДВИГУНІВ
ПОСТ ІЙНОГО СТРУМУ З ПАРАЛЕЛЬНИМ І ПОСЛ1ДОВНИМ
ЗБУДЖЕННЯМ
Мета робота
Метою даної роботи є ознакомления студентів з деякими методами регулювання кутової швидкості електроприводів постійного струму. Досліджуються статичі характеристики приводив регульованої кутової швидкорті з двитунами паралельного і послідовного збудження, що змінютъся експериментально, а також отрймані розрахунковим методом.
Зміст робота
1..Ознакомится зі змістом роботи й електричною схемою лабораторної установки.

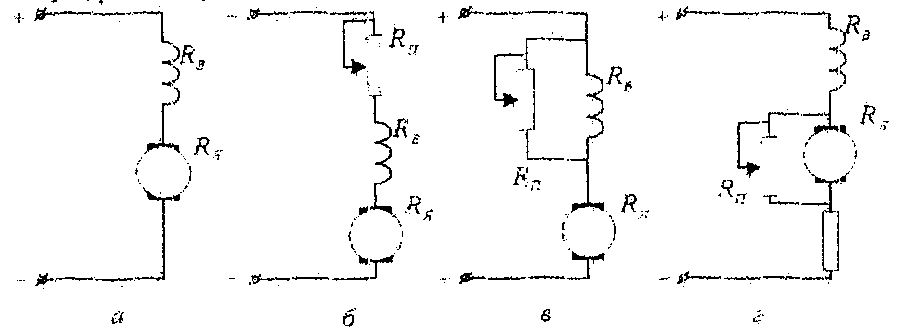
Рис. 1, Деякі схеми регулювання кутової швидкрсті електроприводу з двигунами незалежного та паралельного збудження.
2. Для приводу з двигуном паралельного збудження необхідно:
а) зняти експериментально швидкістні характеристики: природну
(рис. 1, а) - при вкдюченні перемикача В2 . штучну - при включенні опору в ланцюг якоря (рис. 1, б) . штучну - при включенні обох обмоток збудження (рис. 1. в) щтучну з ослабленим потоком при вимиканні перемикачів В2,ВЗ;
б) побудувати швидкісну і механічну характеристики двигуна по паспортним даним;
в) побудувати розрахунковим методом механічні характеристики ω = f (М ) використовуючи для цього експериментальні
швидкісні і характеристики ω = f (М Я ) (пункту а);
г) визначити діапазони регулювання кутової швидкості при номінальному значенні моменту двигуна.
З.Для приводу з двигуном послідовного збудження : а) зняти експериментально швидкісні характеристики: природну (рие.2,а) , штучну - при включенні опору в ланцюг обмотки двигуна (рис. 2? б) штучну - при шунтуванні ланцюга якоря.( рис. 2, г);
Риб.2. Деякі схеми регулювання кутової швидкості електропривода з двигунами послідовного збудження
б) побудувати механічні характеристики розрахунковим методом, використовуючи, для цього екепериментальні швидкіні характеристики пункту а);
в) побудувати штучну швидкісну характеристику при включені в ланцюг обмоток опору і граничну характеристику графічним методом;
г) визначити діапазони регулювання кутової швндкості при номинальному значенні моменту,
Основні відомості про регулювальні властивості двигунів постійного струму
Для багатьох виконавчих механізмів літальних апаратів необхідні електроприводи з регульованою кутовою швидкістю. Регульований привід є невід’ємним елементом багатьох наступних сиетсм., широко застосовуваних в авіації.
Основними показниками, що характеризують різні метода регулювання кутової швидкості є : діапазон регулювання, платність і економічність регулювання, потужність ланцюга, керування і. т. д. Необхідний діапазон регулюванні рутової швидкості паливних насосів знаходяться в межах 2-5, а для радіолокаційних призовів 50-200
Аналітичний вираз механічної характеристики електродвигуна будь-якого збудження має вигляд:
ω= (1)
(1)
де ω – кутова швидкість двигуна, рад/с;
J – напруга, В;
С=Ке =К - постійна машина;
R –опір обмотки двигуна, Ом
(для двигунів з незалежним і паралельним збудженням R=R ;)
Для двигуна послідовного збудження R=R+R)
Мэ – електромагнітний момент двигуна H·м
Основне допущення , прийняте при складанні рівняння (1) , нехтування реакцією якоря і сталість моменту навантаження.
На рис. 1. а, б, в, г. 2 а, б, в г, зображені схеми включення двигунів з незалежним, паралельним і посл.ідовним збудженням.
Рис. 1,а , 2,а відповідають природним схемам включення , тобто схемам , у яких відсутні додаткові, опори, а напруга бортмережі - номінальна.
Інші схеми відповідають штучним схемам включення.
Способи регулювання кутової швидкості можуть бути зведені до нас тучних.:
а) регулювання опором струму якоря (рис. 1,б,2, а, б. г);
б) регулювання зміного струму збудження (рис, 1,в,2,в,г);
в) регулювання зміною напруги, що підводиться (рис.1,г). Основні властивості двигунів постійного струму можуть бути
виражені. доступними характеристиками:
а) швидкісною ω =f(Iя)
б) моментною Mэ=f (Iя),
в) механічною ω = f(Mэ),
Для двигунів з незалежним збудженням ці характеристики Мають прямолінійний вид, тему то магнітний потік, постійний ( ари незмінній напрузі живлення).
Для селієсіпіх двигунів магнітний потік змінюється зі зміною струму якоря, згідне кривої намагнічування машини Ф = f(Ів)
У виразі механічної характеристики (I) електромагнітний момент визначається виразом :
Mэ = Km ФIя = СФIя
Тому дія двигуна послідовного збудження характеристики ω =f(Iя), Mэ=f (Iя), Mэ = f(ω),істотно нелінійні. У режимі пуску (при нерухомому роторі) ЕРС відсутня і пусковий: струм
визначається
виразом.

При збільшенні кутової швидкості струму у ланцюзі двигуна зменшується через збільшення ЕРС, индуктируємой в якорі.
При великих значеннях струму магнітна система насичена
(рис.3 при I > I1) і зміна струму якоря мало позначається на зміні магнітного потоку Мэ≈СФІЯ .
В міру виходу системи з насичення (рис.3, при І <1 ), магнітний потії': значно змінюється і впливає на ЕРС Мэ≈СФІ2ε
При податьщсї зменшенні струму в двигуні« а отже, зменшенні магнітного потоку значення ЕРС наближаеться до напруги живлення, а кутова швидкість прямує до нескінченності

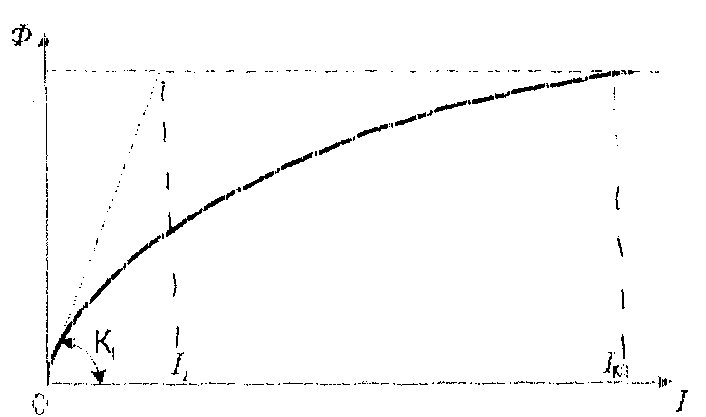
Рис.3. Залежність магнітного потоку двигуна послідовного збудження з функції струму якоря
У реальних машинах, через гістерезис і механічні втрати в двигуні швидкістна характеристика перетинає вісь ординат при кінцевій кутовій швидкості . Проте така швидкість для електромеханізму літального апарата є неприпустимо великою, тому що може привести до "розносу" конструкції.
1. Регулювання, кутової швидкості двигуном з незалежним паралельним збудженням
Схеми регулювання представлені на рис. 1, а, б., в, г.
1 .При включенні, опору в ланцюг якоря зменшується перевантажувальна здатність двигуна і жорсткість механічної характеристики ростуть утрати через збільшення ковзання:
∆P = P1 Sн (3)
де ∆P – втрати велектродвигуні
P1 – потужність, споживана електродвигуном
 - номінальне ковзання
- номінальне ковзання
Такий метод регулювання кутової швидкості неекономічний, ККД малий. Діапазон регулювання при постійному моменті навантаження теоретично великий, але при зміні Мн = var
діапазон регулювання не більше 3-5, так як при вимірі моменту навантаження різко змінюється кутова швидкість.
При визначенні діапазону регулювання Необхідно визначити нижню механічну характеристику, що відповідає стійкої області роботи приводу. Маючи природну і штучну нижню характеристику, діапазон регулювання визначається:

ωнmax - номінальна кутова швидкість природної характеристики;
ωнmin - номінальна кутова швидкість природної характеристики;
Рівняння штучної механічної характеристики при включенні опору R в ланцюг якоря мас вид:

де ωк - штучна кутова швидкість
 -
кутова швидкість холостого ходу двигуна
-
кутова швидкість холостого ходу двигуна
Швидкісна і механічна характеристики прямолінійні. Швидкісна характеристика (рис.4: перетинає осі координат у точках:
; Iя
= 0;
 ;
;

Швидкісна характеристика може бути побудована по ласпортним даним (номінального режиму)
Відомими тачками е точки нокінялміого режиму, режиму холостого ходу і короткого замикання координатами::
 =
= ,
Iя
=
Iян
;
,
Iя
=
Iян
;
 =
=
 ,
Iя
=
0;
,
Iя
=
0;

Я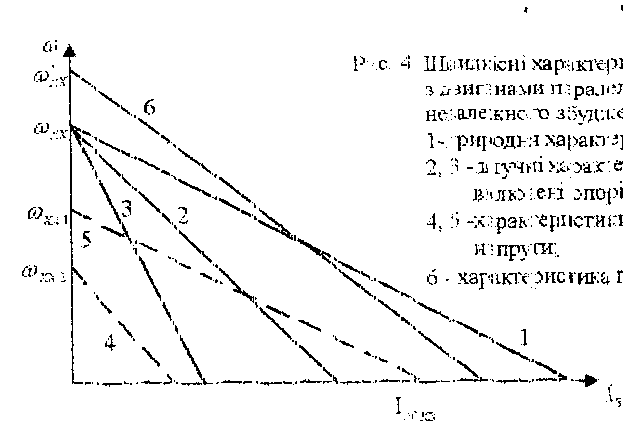 кщо
опір якоря невідомий, то його можна
приблизно визначити
з виразу:
кщо
опір якоря невідомий, то його можна
приблизно визначити
з виразу:
 (6)
(6)
Вираження штучної кутової швидкості характеристики має
вигляд:
 (7)
(7)
Моментна характеристика М3=J(Ix) (рис.5.) визначається виразом: (2). Електромагнітний момент більше моменту на валу на величину моменту втрат ∆M (сил тертя, втрат на перемагнічування й ін.)
При включенні опорів Rя, Rя2 у ланцюг якоря жорсткість
механічної характеристики зменшується (рис.6, прямі 1-3).
2. При зміні магнітного потоку рівняння швидкісної і механічної характеристик набуває вигляду:
 (8)
(8)
 (9)
(9)
Зі збільшенням опору в обмотці .збудження жорсткість металічної характеристики зменшується, а кутова швидкість холостого ходу збільшується (рис.6, пряма 6). Діапазон регулювання не перевищує 2-3.
Метод регулювання відрізняється простотою, малою потужністю керування і широко використовується, наприклад, в електроприводі паливних насосів.
Рис.4 Швидкісні характеристики електроприводів з двигунами паралельного і незалежного збудження:
1-природня характеристика;
2, 3-характеристики при включенні опорів і ланцюга якоря;
4, 5-характеристики при зміні напруги;
6 – характеристика при ослабленні потоку.
Р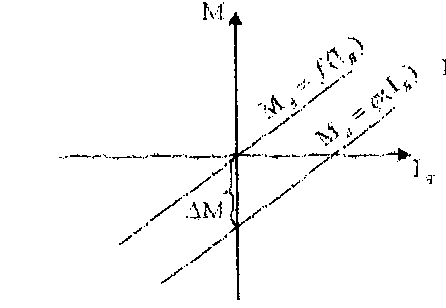 ис.
5 Швидкісні характеристики єлектроприводів
Mл=
f(Iя)
ис.
5 Швидкісні характеристики єлектроприводів
Mл=
f(Iя)
Рис. 6. Механічні перетворення M=f(w):
1-природня характеристика;
2,3-штучна характеристика при включенні опорів в ланцюг якоря;
4,5-при зміні напруги Uнам>U>U;
6-при ослабленні магнітного потоку
3.Зі зміною напруги живлення, що підводиться до якоря електродвигуна (рис.2,г) , змінюється кутова швидкість холостого ходу. Механічні характеристики зображені на рис.6 прямі 4.5. У порівнянні з іншими методами діапазон регулювання в цьому випадку підвищується. Метод широко використовується в системах автоматичного регулювання і здійснюється за допомогою
напівпровідникових, магнітів електромашинних підсилювачів. Потужність ланцюга керування незначна.
Припущення про сталість потоку збудження справедливе при: номінальних параметрах схеми; при перевищенні струму значення