

ЛАБОРАТОРНА РОБОТА №2
РЕГУЛЮВАННЯ КУТОВОЇ ШВИДКОСТІ СИСТЕМИ
ГЕНЕРАТОР – ДВИГУН
Мета роботи
Мета даної роботи вивчити генераторний метод регулювання кутової швидкості електроприводів постійного струму.
Зміст роботи
1. Вивчити лабораторну установку для дослідження електроприводу по системі Г-Д.
2. 3а допомогою вимикачів, розташованих на пульті, установки, комутувати схему, що відповідає рис. 15.
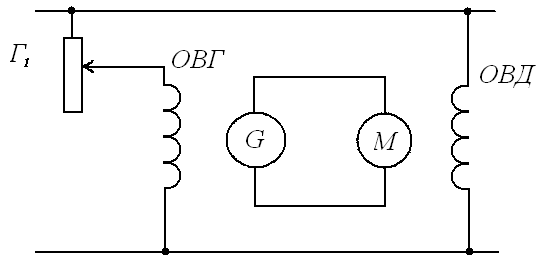
Рис. 15. Електрична схема лабораторної установки по регулюванню кутової швидкості системи Г-Д.
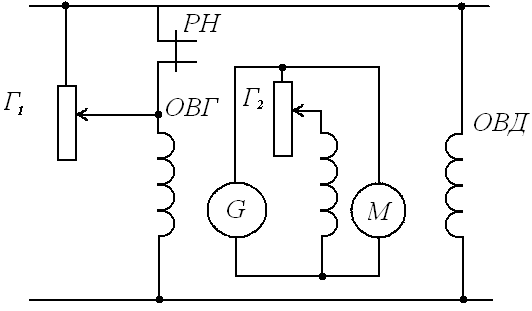
Рис. 16. Електрична схема лабораторної установки по регулюванню кутової швидкості системи Г-Д з регулятором напруги.
3. Зняти швидкісні характеристики електродвигуна і зовнішні характеристики генератора для чотирьох значень струму збудження генератора:
- для максимального значення струму збудження генератора, тобто струму, при якому напруга на затискачах якоря електродвигуна (навантаженого номінальним моментом, дорівнює номінальному (27 В);
- для мінімального значення струму збудження генератора, тобто струму, при якому досягається стійка мінімальна кутова швидкість електродвигуна, навантаженого номінальним навантаженням;
- для двох проміжних значень струму збудження генератора (струм збудження електродвигуна під час досліду повинен залишатися незмінним і рівним номінальному значенню).
4. За допомогою вимикачів, розташованих на пульті установки, комутувати схему, що відповідає рис. 16.
5. Зняти швидкісні характеристики електродвигуна, зовнішні характеристики генератора і залежність струму збудження генератора від струму якоря електродвигуна для чотирьох положень керуючого реостата:
- для положення, при якому напруга на затискачах якоря електродвигуна, навантаженого номінальним навантаженням дорівнює номінальному (27 В);
- для положення при якому виходить стійка мінімальна швидкість електродвигуна, навантаженого номінальним навантаженням;
- для двох проміжних положень керуючого реостата.
6. Розрахувати і побудувати моментну і механічні характеристики електродвигуна.
7. Визначити для кожної зі схем:
- регулювальні характеристики при трьох значеннях навантаження;
- діапазон регулювання кутової швидкості при Мк;
- жорсткість механічних характеристик;
- припустиме навантаження електродвигуна при poботі на регулювальні характеристики, припускаючи, що режим роботи приводу тривалий;
- залежність ККД від кутової швидкості і номінального навантаження.
8. Пояснити характер отриманих у дослідах залежностей.
9. Скласти звіт по роботі.
Основні теоретичні відомості
Для багатьох авіаційних пристроїв потрібен електропривод, що забезпечує можливість регулювання його кутової швидкості. Під регулюванням кутової швидкості електродвигуна розуміють примусову зміну кутової швидкості його руху по визначеному закону в залежності від вимог, що характеризують роботу виконавчих механізмів.
Існує багато способів регулювання кутової швидкості електроприводу. Основні з них для електродвигуна постійного струму можуть бути визначені з формули, що виражає механічну характеристику:
Такими способами є:
- регулювання кутової швидкості шляхом зміни опору в ланцюзі якоря;
- регулювання кутової швидкості шляхом зміни потоку збудження;
- регулювання кутової швидкості шляхом зміни напруги, що підводиться до якоря електродвигуна.
Перші два способи регулювання кутової швидкості одержали назву параметричних; так як в їхню основу покладено зміну значень параметрів ланцюгів якоря і збудження електродвигуна (опорів ланцюгів якоря і збудження).
При реалізації третього із зазначених, способів регулювання кутової швидкості для кожного електродвигуна необхідне автономне джерело електроенергії, що забезпечує необхідну зміну напруги, що підводиться до затисків електродвигуна. Тому цей спосіб одержав назву генераторного способу регулювання швидкості. У найпростішому випадку як генератор може бути використаний електромашинний генератор, що приводиться в обертання допоміжним двигуном. Щоб підкреслити цю особливість системи регулювання, її називають системою генератор-двигун або скорочено Г-Д.
Принципову схему системи Г-Д зображено на рис. 15. Якір електродвигуна М, кутову швидкість якого потрібно регулювати, підключений до генератора з незалежним збудженням, що приводиться в обертання допоміжним двигуном ВД. Електродвигун М має незалежне збудження. Зміна напруги, що підводиться до якоря електродвигуна, а отже, і зміна кутової швидкості електродвигуна здійснюється зміною струму збудження генератора.
Регулювання швидкості цим способом можна здійснити як східчасто, так і плавно в залежності від конструкції керуючого реостату. Так як включенням реостата в ланцюг збудження генератора струм збудження і напругу можна тільки зменшити, то і регулювання кутової швидкості можна, здійснити тільки "вниз". Діапазон регулювання кутової швидкості в системі Г-Д при зміні струму збудження генератора звичайно не перевищує 10 (Дω ≤ 10) через неможливість одержання стійкої малої кутової швидкості валу електродвигуна. Основною причиною є наявність залишкового магнітного потоку генератора, що визначає Е. Крім того, опір щіткового контакту непостійний, унаслідок чого і спадання напруги в ланцюзі якорів двигуна і генератора, також непостійне, і при малих кутових швидкостях електродвигуна порівняно з ЕДС генератора. Нестабільність ЕДС і спадання напруги на щітковому контакті обумовлюють нестабільність малих кутових швидкостей.
Механічні характеристики електродвигуна при зазначеному способі регулювання кутової швидкості являють собою сімейство паралельних прямих похилих до горизонтальної осі. Кут нахилу характеристик у системі Г-Д виявляється більшим, ніж у природної характеристики двигуна при постійній напрузі живлення, тобто жорсткість характеристик у системі Г-Д за схемою рис. 15 менше жорсткості природної характеристики. Дійсно, природна механічна характеристика має вираз:

Де
У системі Г-Д U=E-I’Rяд. Тому

При заданому струмі збудження генератора і постійної кутової швидкості допоміжного двигуна, що обертає якip генератора ЕРС. Ер=const. Жорсткість характеристик у системі Г-Д.
Як видно з рівняння (2) фізична сутність того, що в системі, Г-Д за схемою рис. 15 механічні характеристики мають меншу жорсткість, ніж природні, пояснюються зменшенням напруги, що підводиться до якоря двигуна, при навантаженні його за. рахунок збільшення внутрішнього опадання напруга в, якорі генератора.
Якщо це спадання напруги яким-небудь способом автоматично компенсувати, то жорсткість характеристик у системі Г-Д буде така ж, як у природної характеристики. На рис. 16 зображено схему регулювання кутової швидкості, електродвигуна по системі Г-Д, у якій напруга генератора стабілізується за допомогою вібраційного регулятора напруги. Зміна напруги генератора, а отже, і рулювання кутової швидкості електродвигуна досягається зміною опору, включеного в ланцюг обмотки регулятора напруги.
Максимальне навантаження характеризується максимальною величиною моменту, при якому двигун може працювати, не перегріваючись. Відомо, що нагрівання двигуна визначається потужністю втрат; що в основному залежать від споживаного електродвигуном струму. При номінальному струмі в двигуні останній нагрівається до гранично припустимої температури. Тому і припустимим навантаженням електродвигуна варто вважати таке, при якому електродвигун споживає номінальний струм. Щоб визначити максимальне припустиме навантаження: при роботі двигуна на регулювальній характеристиці, необхідно знати для цього випадку моментну характеристику електродвигуна. Максимально припустимим є момент, що відповідає номінальному струму якоря електродвигуна.
Коефіцієнт корисної дії системи Г-Д дорівнює відношенню корисної потужності, до повної потужності споживаної всією системою.
Через те, що електричні машини мають відносно високий ККД, системи Г-Д можуть мати кращі енергетичні показники, ніж параметричні системи регулювання кутової швидкості при однакових потужностях і кратностях регулювання.