

9.2 Рабочий процесс трёхфазного синхронного двигателя
9.2.1 Устройство трёхфазной синхронной машины
Эскиз конструкции синхронной машины изображён ниже:

1 – корпус; 2 – сердечник статора; 3 – обмотка статора; 4 – ротор; 5 – вентилятор;
6 – выводы обмотки статора; 8 – контактные кольца; 9 – возбудитель
Рисунок 9.15 - Устройство синхронной машины небольшой мощности
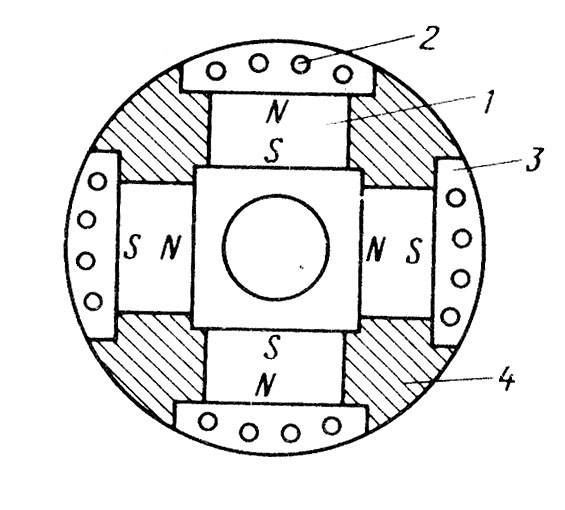
Роторы синхронной машины выполняются явнополюсными и неявнополюсными.

1 – полюс; 2 – обмотка возбуждения; 3 – полюсный наконечник
Рисунок 9.16 - Поперечное сечение явнополюсного (а) и неявнополюсного (б) роторов
Синхронные машины проектируют таким образом, чтобы количество полюсов на статоре было равно количеству полюсов на роторе. От количества полюсов зависит синхронная частота вращения ротора. Явнополюсные роторы применяют в синхронных машинах большой мощности, имеющих одну или две пары полюсов и соответственно частоту вращения 3000 или 1500 об/мин., например, для работы с паровыми и газовыми турбинами. Неявнополюсные роторы применяют в синхронных машинах с большим числом полюсов и соответственно относительно низкой частотой вращения. Синхронные машины с явнополюсным ротором и горизонтальным расположением вала используются в качестве двигателей и генераторов. Неявнополюсные роторы с вертикальным расположением вала имеют синхронные генераторы для работы с гидравлическими турбинами.
Основным способом возбуждения синхронных машин является электромагнитное возбуждение, состоящее в том, что на полюсах ротора располагают обмотку возбуждения. Для питания обмотки возбуждения используют:
- специальные генераторы постоянного тока независимого возбуждения, которые располагаются на общем валу с ротором синхронной машины; ток через контактные кольца и щётки поступает в обмотку возбуждения синхронной машины;
- синхронные генераторы переменного тока, у которых обмотка якоря расположена на роторе, а обмотка возбуждения на статоре, т.е., обмотка якоря возбудителя и обмотка возбуждения синхронной машины оказываются вращающимися, их электрическое соединение осуществляется непосредственно; переменный ток от них выпрямляют с помощью полупроводниковых выпрямителей;
- принцип самовозбуждения, когда энергия переменного тока, необходимая для возбуждения, отбирается от обмотки статора синхронного генератора и через понижающий трансформатор и выпрямитель преобразуется в энергию постоянного тока.
Существенное отличие между синхронными генераторами и синхронными двигателями таково: в генераторе электромагнитный момент является тормозящим, а в синхронном двигателе вращающим.
9.2.2 Принцип действия синхронного двигателя
Принцип действия синхронного двигателя (СД) заключается во взаимодействии магнитного поля статора, подключаемого к сети переменного тока, и магнитного поля ротора, имеющего обмотку возбуждения и пусковую асинхронную обмотку. Конструктивно ротор СД может быть явнополюсным и неявнополюсным в виде цилиндра. В качестве источника питания обмотки возбуждения чаще всего используют генератор постоянного тока, но могут использоваться тиристорные управляемые выпрямители (тиристорные возбудители).
С


Рисунок 9.17 - Схема включения (а) и механическая характеристика (б) синхронного
двигателя
Статор СД выполняется аналогично статору асинхронного двигателя с трёхфазной обмоткой, подключаемой к сети переменного тока. Ротор СД имеет обмотки возбуждения и пусковую короткозамкнутую в виде беличьей клетки.
Г
енератор постоянного тока устанавливается на одном валу с СД и обычно имеет мощность 0,3 3,0 % СД. Изменение тока возбуждения С.Д.
 осуществляется потенциометром тока
возбуждения возбудителя. В современных
схемах автоматического регулирования
возбуждения (АРВ) СД применяют тиристорные
возбудители.
осуществляется потенциометром тока
возбуждения возбудителя. В современных
схемах автоматического регулирования
возбуждения (АРВ) СД применяют тиристорные
возбудители.
СД имеет постоянный по направлению
момент только в том случае, когда ротор
вращается со скоростью магнитного поля
статора
 .
Именно поэтому механическая характеристика
СД представляет собой горизонтальную
линию. Для определения максимального
момента нагрузки
.
Именно поэтому механическая характеристика
СД представляет собой горизонтальную
линию. Для определения максимального
момента нагрузки
 ,
до которого сохраняется синхронизм СД
с питающей сетью, служит угловая
характеристика СД.
,
до которого сохраняется синхронизм СД
с питающей сетью, служит угловая
характеристика СД.
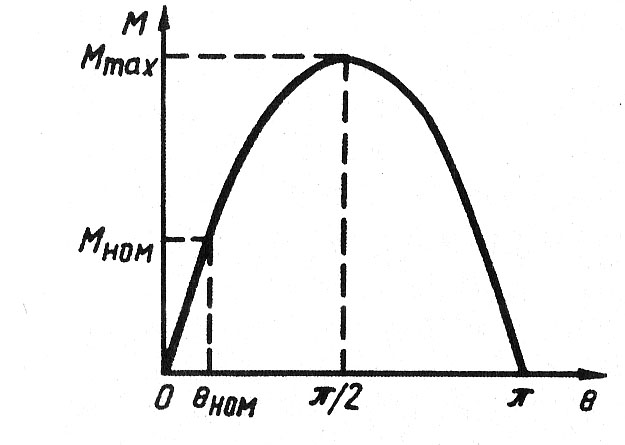
Рисунок 9.18 - Угловая характеристика синхронного двигателя
Эта
характеристика отражает зависимость
момента М от угла сдвига θ между векторами
ЭДС статора Е и фазного напряжения сети

 ,
,
 -
скорость вращения магнитного поля
статора.
-
скорость вращения магнитного поля
статора.
 характеризует перегрузочную способность
СД (
характеризует перегрузочную способность
СД ( =
25 - 30˚), кратность максимального момента
=
25 - 30˚), кратность максимального момента
 У синхронного двигателя с резко переменным
моментом сопротивления (привод дробилок,
поршневых насосов) кратность максимального
момента может достигать значения 3,5.
У синхронного двигателя с резко переменным
моментом сопротивления (привод дробилок,
поршневых насосов) кратность максимального
момента может достигать значения 3,5.
Перегрузочная способность зависит от напряжения сети и ЭДС Е, т.е. от тока возбуждения ротора. Изменяя ток возбуждения можно управлять перегрузочной способностью синхронного двигателя. На угловых характеристиках горизонтальная линия – это момент сопротивления на валу. Её пересечение с восходящими ветвями характеристик, где возможна устойчивая работа синхронного двигателя, дают значения рабочих углов рассогласования θ. На нисходящих ветвях характеристик, так же как и для генератора, устойчивая работа двигателя невозможна.
Как все электродвигатели, синхронный двигатель обладает свойством саморегулирования: при изменении момента сопротивления на валу изменяется угол рассогласования θ и электромагнитный вращаюший момент становится равным моменту сопротивления. При этом изменяется активная мощность и ток статора двигателя, частота вращения остаётся неизменной.
9.2.3 Характеристики синхронных двигателей
9.2.3.1 U – образные характеристики
Это зависимость тока статора от тока возбуждения при стабильном напряжении сети (постоянном магнитном потоке статора).

Рисунок 9.19 - U – образные характеристики синхронного двигателя
Таким образом, при недовозбуждении
 СД работает с отстающим током (
СД работает с отстающим током ( );
при перевозбуждении
);
при перевозбуждении
 и СД работает с опережающим током
и СД работает с опережающим током
 .
.
Эта способность СД является ценным качеством, которое используется для повышения коэффициента мощности электроустановок путём компенсации части индуктивной мощности работающих электрических двигателей. СД, предназначенные для работы с перевозбуждением, имеют большие габариты и меньший КПД, чем обычные СД.
Мощность синхронных компенсаторов достигает 100 - 160 МВ·А.
9.2.3.2 Рабочие характеристики СД
Эти характеристики СД представляют
собой зависимость частоты вращения
ротора
 ,
потребляемой мощности
,
потребляемой мощности
 ,
момента нагрузки
,
момента нагрузки
 ,
коэффициента мощности
,
коэффициента мощности
 и тока в обмотке статора
и тока в обмотке статора
 от полезной мощности двигателя
от полезной мощности двигателя
 .
.
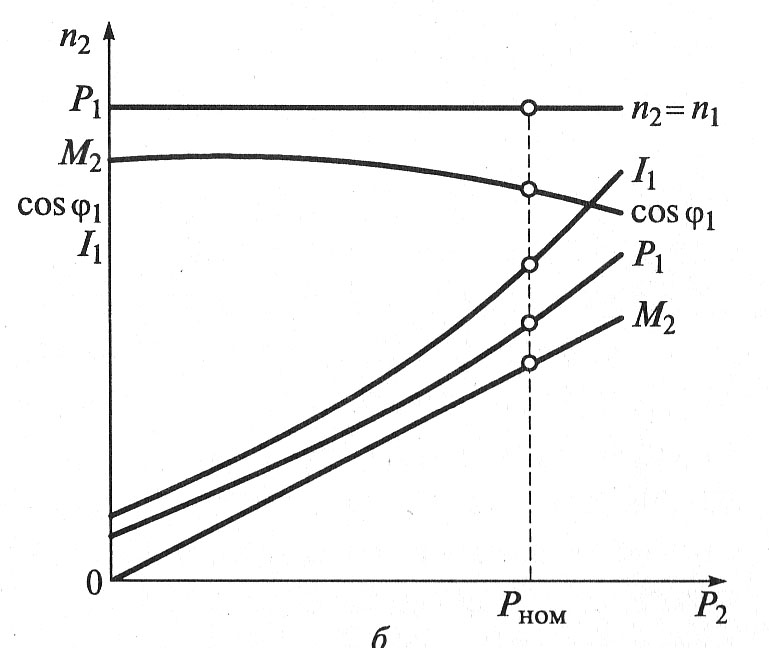
Рисунок 9.20 - Рабочие характеристики синхронного двигателя

9.2.4 Синхронные микродвигатели в исполнительных механизмах автоматики
Эти СД отличаются от обычных синхронных двигателей отсутствием обмотки возбуждения на роторе. Микродвигатели выпускаются в трех- и двухфазном исполнении. В двигателях однофазных размещено на статоре две обмотки, одну из которых включают через фазосдвигающий элемент. В зависимости от типа ротора различают синхронные микродвигатели с постоянными магнитами, гистерезисные и реактивные.
9.2.4.1 Синхронный микродвигатель с постоянными магнитами на роторе
Эскиз конструкции ротора синхронного двигателя с постоянными магнитами (СД с ПМ) имеет вид:
1 – магниты; 2 – стержни пусковой обмотки; 3 – полюсы; 4 – пластмассовая заливка
Рисунок 9.21 - Конструктивная схема ротора синхронного двигателя
с постоянными магнитами
Вращающий момент возникает как результат взаимодействия полюсов статора с полюсами намагниченного ротора.
Свойства
и рабочие характеристики СД с ПМ не
отличаются от свойств СД с электромагнитным
возбуждением, но в нем нельзя изменять
вращающий момент и
 .
.
9.2.4.2 Гистерезисный микродвигатель
«Гистерезис» - отставание состояния намагниченности ферромагнетика от изменения внешнего магнитного поля. Поэтому гистерезисный синхронный микродвигатель – это двигатель, у которого момент вращения ротора возникает за счёт явления гистерезиса при перемагничивании ротора.
Магнитотвёрдый материал ротора гистерезисного двигателя (ГД) намагничивается и перемагничивается внешним магнитным полем статора.

а) – МГ = 0; б) – МГ > 0
Рисунок 9.22 - Схема, поясняющая возникновение «гистерезисного» момента
ГД может работать как в синхронном, так и в асинхронном режиме.
В синхронном режиме при МС<МГ перемагничевания ротора не происходит и ГД работает как СД с ПМ. Но угол θ не может превышает угла гистерезисного запаздывания θГ, иначе начинается перемагничивание. Обычно θГ ≤ 20 - 250.
При пуске и в синхронном режиме Мрез=МГ+Масин

Рисунок 9.23 - Механическая характеристика гистерезисного двигателя
ГД имеет большой пусковой момент и
момент входа в синхронизм, а ток мало
при этом изменяется
 .
КПДГД= 50-60 %, cos φ =0,4
- 0,6. Этот микродвигатель позволяет
регулировать частоту ротора изменением
частоты напряжения питания.
.
КПДГД= 50-60 %, cos φ =0,4
- 0,6. Этот микродвигатель позволяет
регулировать частоту ротора изменением
частоты напряжения питания.