

Точность определения координат X и z точек экспериментального полигона при уравнивании триплета ф8-ф2-ф4 по точкам «уреза воды» и центрам фотографирования
ошибка ед. веса, pix |
вероятные ошибки (P=67%) |
среднее расхождение с «опорой» |
стандарт расхождений с «опорой» |
|||
mX, м |
mZ, м |
dX, м |
dZ, м |
dX |
dZ |
|
1.76 |
2.7 |
2.1 |
0.1 |
3.4 |
0.7 |
0.8 |
где:
- ошибка единицы веса – вычислена по формуле (13);
- вероятные ошибки – вычислены по формулам (12);
- средние расхождения и стандарт расхождений с «опорой» – определены по разностям вычисленных и известных координат точек калибровочного полигона.
Как видно из таблицы 4, при стандарте расхождений менее 1 м имеет место систематическая ошибка определения координат Z - 3.4 м, вызванная ошибками определения углов альфа. Из величин вероятных ошибок следует, что такое отклонение было возможно по причине появления случайных ошибок измерения снимков с вероятностью 33%, либо оно обусловлено следствием влияния остаточных систематических ошибок на снимках.
Ошибка единицы веса, равная почти 2 пикселям, говорит о недостаточной точности измерения координат на цифровых фотоснимках, присутствии остаточных неустраненных систематических ошибок.
Для выбора оптимальных геометрических и точностных параметров стереофотосъемки (с обработкой по точкам уреза воды) был разработан специальный программный модуль по созданию макетных снимков с возможностью имитационного моделирования случайных ошибок измерения снимков.
Первым делом был проанализирован реальный предыдущий проект - триплет ф8-ф2-ф4. При той же геометрии триплета (базисы 50 м, среднее отстояние от «берега» 190 м) варьировалась случайная ошибка измерения координат на снимках от 0 до 10 пикселей. Результаты исследований представлены в таблице 5 и на графике (см. рис. 8.).
Таблица 5
Точность определения координат X и z точек «уреза воды» экспериментального полигона в зависимости от точности измерения снимков
точность измерения снимков, pix |
ошибка ед. веса, pix |
вероятные ошибки (P=67%) |
|
mX, м |
mZ, м |
||
0 |
0.00 |
0.0 |
0.0 |
2 |
0.54 |
0.8 |
0.7 |
4 |
1.17 |
1.8 |
1.5 |
6 |
1.64 |
2.6 |
2.0 |
6 |
1.57 |
2.6 |
2.0 |
7 |
2.08 |
3.3 |
2.6 |
Из данных таблицы 5 следует, что ошибка единицы веса 1.76 пикселя (полученная на реальном объекте) означает, что точность измерения координат на снимках составляла около 6.5 пикселей, хотя на самом деле она не превышала 1-2 пикселей.
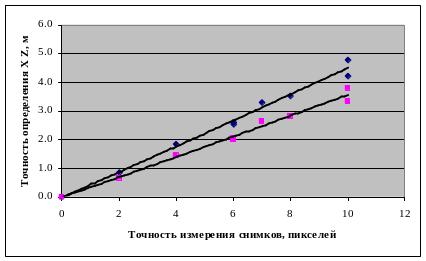
Рис.8. График зависимости вероятных ошибок определения координат X и Z точек «уреза воды» от точности измерения снимков (сеть с геометрией реального объекта)
Из представленного на рис.8 графика следует, что для достижения метровой точности определения координат X, Z точек «уреза воды» (для реального варианта расположения точек фотографирования и снимаемого объекта – на основе экспериментального полигона) необходимо, чтобы точность измерения снимков составляла не более 2 пикселей (с учетом уровня остаточной систематики в измерениях снимков).
На точность определения координат X и Z точек объекта по предлагаемой технологии (уравнивание с центрами фотографирования и точками уреза воды) влияет не только точность измерения координат на фотоснимках, но и геометрия фотограмметрической сети, а также количество точек, участвующих в обработке. Под геометрией сети понимаем: соотношение положения точек фотографирования между собой (базис фотографирования, ориентация оси фотографирования фотокамеры относительно базиса), значение отстояния точек объекта от базисной линии, а так же амплитуда точек объекта в направлении оси Z (далее будем называть эту амплитуду изрезанностью береговой полосы).
Основные выводы, которые можно сделать на основании результатов обработки экспериментального полигона и имитационного моделирования:
Доказано, что наличие центров фотографирования (линейных элементов внешнего ориентирования) и измеренных на снимках триплета точек уреза воды позволяют определить угловые элементы внешнего ориентирования снимков и, соответственно, координаты точек сфотографированных объектов. При этом необходимости специально создавать замаркированные опорные точки на берегу не требуется для уравнивания фотограмметрических построений.
Если в зоне тройного перекрытия снимков (в триплете) находятся только 3 точки «уреза воды» лежащие на одной линии , то система не имеет решения.
Изрезанность береговой полосы существенно влияет на результаты уравнивания - точность определения координат X и Z точек уреза воды. При трех точках в зоне тройного перекрытия добиться метровой точности определения координат можно при изрезанности береговой полосы не менее 40 м (при отстоянии от береговой полосы 150-250 м) и точности измерения снимков 2 пикселя.
При 15 точках в зоне тройного перекрытия добиться метровой точности определения координат X, Z можно при изрезанности береговой полосы 10 м (при отстоянии от береговой полосы 275 м). Но при этом точность измерения снимков должна составлять 2 пикселя. Если точность измерения снимков 6 пикселей, то получить метровую точность определения координат X,Z точек уреза воды можно на отстоянии от берега 150 м при изрезанности береговой полосы 30 м.