

Лекция 8
Принципы построения многоканальных систем передачи информации
Основные сведения о командных радиолиниях По условиям исполнения различает два класса радиокоманд: команда в реальном масштабе времени, которые исполняются сразу после приема их на борту КА и команды временных программ, которые предварительно записываются в бортовое запоминающее устройство и исполняются в заданный момент времени по сигналу бортового программно-временного устройства или по дополнительной команде, переданной с пункта управления.
В зависимости от характера передаваемой информации радиокоманды подразделяются на количественные и функциональные. Количественные команда представляют собой числовые величины, которые в общем случав могут принимать положительные и отрицательные значения. Функциональные команды используются для выполнения различных служебных операций, например, для многократного и однократного включения (выключения различных бортовых устройств.
Количественные команды бывает аналоговыми и цифровыми. При формировании аналоговых команд на пункте управления используется счетно-решающий прибор или различные датчики. Цифровые команды могут вырабатываться о помощью ЭВМ или получаться в результате преобразования аналоговых команд в цифровые. Цифровые команды передаются по KPЛ в дискретные моменты времени. Передача аналоговых команд может осуществляться как непрерывно, так и дискретно во времени.
В зависимости от вида команд, передаваемых по каналам КРЛ, различают цифровое, аналоговые и комбинированные радиолинии. В комбинированных КРЛ имеется цифровые и аналоговые каналы.
Командные радиолиний представляет собой многоканальные радиолинии, которые обеспечивают передачу команд, адресованных тем или иным получателям (исполнителям) команд. В командных радиолиниях находят применение сигналы с двумя и тремя ступенями модуляции. При формировании таких сигналов в каждом из каналов КРЛ используются гармонические или импульсные поднесущие колебания, которые модулируется командным сообщением (первая ступень модуляции). Гармоническое поднесущие колебание подвергается амплитудной, частотной или фазовой модуляции. В случае импульсного поднесущего колебания модулируется один из параметров импульсной последовательности, т.е. амплитуда, длительность, временное положение или частота следования импульсов.
В результате осуществления первой ступени модуляции образуются сигналы предназначенные для модуляции несущего колебания или поднесущих колебаний, которыми модулируется затем несущее колебание. Все операции, связанные с модуляцией поднесущих колебаний, осуществляется в аппаратуре кодирования и уплотнения каналов, входящей в состав аппаратуры пункта управления.
При обработке сигнала в приемном тракте сначала осуществляется демодуляция несущего колебания, затем - демодуляция поднесущего колебания. Последняя операция выполняется в аппаратуре разделения каналов и декодирования, расположенной на борту КА.
В КРЛ находят применение узкополосные и широкополосные сигналы, которые различается значением базы сигналы Вс= FсTс . где - ширина частотного спектра и длительность сигнала соответственно. В качестве широкополосных сигналов часто используется так называемые составные сигналы. Составные сигналы представляют собой упорядоченную совокупность некоторого числа элементарных сигналов, причем отдельные элементарные сигналы не имеет самостоятельного информационного значения используется только для формирования результирующих сигналов определенной структуры. Различают сомкнутые составные сигналы и составные сигналы с разрывной структурой, а также последовательные, параллельные и последовательно-параллельные составные сигналы.
Некоторые возможные виды составных сигналов приведены на рис. ..
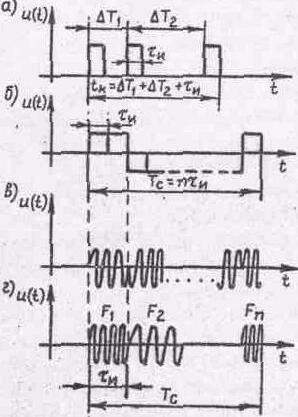
Примером последовательного составного сигнала о разрывной структурой является комбинация из п прямоугольных видеоимпульсов одинаковой длительности, разделенных фиксированными временными интервалами различной длительности (рис.8.1,а).Наличие пауз определяет разрывную структуру такого сигнала, который часто называют импульсно-временным сигналом.
Примером последовательного сомкнутого составного сигнала является комбинация из п. непрерывно следующих друг за другом во времени биполярных видеоимпульсов одинаковой длительности (рис. 8.1,б). Такой сигнал удобно применять для манипуляция фазы гармонического колебания. В итоге получается одночастотный сомкнутой последовательный составной сигнал (рис…, в). Многочастотный последовательный сомкнутый или разрывной сигнал образуется в результате поочередной передачи во временя n различных по частоте гармонических колебаний конечной длительности (рис….г). База последовательного сомкнутого составного сигнала определяется соотношением Вс=nb,где n- общее число элем. сигналов, b- коэффициент, зависящий
от формы элемент. Сигналов b=1,2
Способ приема составных сигналов основаны на знании их структуры и можно осуществить оптимальный прием.

рис..8.2
Рис.а) соответствует временному уплотнению и синхронной передаче последовательности командных слов одинаковой длительности.
Рис.8.2) –структура двух командных посылок каждая из которых содержит отдельные информационные и адресные части, причем в общем случае эти посылки имеют разную длительность. Адресная часть посылается импульсно – временными сигналами, а командное слово – с помощью кодово - импульсной модуляции.
8.1. Принципы линейного разделения каналов
При линейном разделении каналов используется N модулирующих колебаний, которые являются функциями времени и частоты. В схеме разделения каналов поднесущие разделяются с помощью фильтров и далее после демодуляции получают аналоги первичных сигналов. Схема преобразования показана на рис..8.1
1(t)s1(t)
2(t)s2(t)
3(t)s3(t)
Передача
по
радиоканалу
S11(t)
S12(t)
S13(t)








Объединение Разделение

S
Демодуляторы

S
S11(t)
S1n(t)


 2(t)
Fn2(t)
2(t)
Fn2(t)
S 3(t) Fn3(t)
Демодуляторы

Рис.8.1.
Поднесущие колебания выбираются ортогональными.
I, i=j
Fni*Fnj={ 0,ij В фильтре (Fni)*Fni=C
Ортогональность во времени – не перекрываются импульсы. – Временное разделение каналов.
Частотная ортогональность – Частотное разделение каналов
При таком способе разделения происходит энергетическое разделение каналов.
Процедуры разделения каналов могут быть самыми разными. Например, каждому каналу своя частота или длительность импульса или свое местоположение итп.
В качестве поднесущих колебаний могут использоваться ортогональные сигналы, совпадающие по времени и частоте.
Помехоустойчивые коды являются ортогональными сигналами.
8.2 Принципы нелинейного уплотнения каналов.
Амплитудное уплотнение каналов.
Часто передаются сведение о событиях, которые происходят в какой то момент времени. Формируется такой сигнал с помощью датчиков. Для передачи используются два уровня 0 и 1.
Если используется L уровней, то можно объединять много каналов.
![]() .u-
СКО уровня.
Если -
мало, то возможно подключение нескольких
датчиков.
.u-
СКО уровня.
Если -
мало, то возможно подключение нескольких
датчиков.

Для обеспечения идентификации событий каждому событию присваивается определенный уровень, который выбирается так, чтобы сумма нескольких уровней отличалась от следующего уровня. Это происходит тогда, когда соотношение уровней будет находится в виде геометрической прогрессии. а1+а2+а3 = 1 +2+ 4=1+3+9 (1+2<4, 1+3<9 )
По энергетическим соображениям показатель прогрессии g=2.
Расстояние между
уровнями раз=
6
: Количество уровней
![]()
Число уплотняемых
событий
![]() ,
=1%
Nупл=4,
а1=1,
а2=2,
а3=4,
а4=8
,
=1%
Nупл=4,
а1=1,
а2=2,
а3=4,
а4=8
8.3. Принципы временного разделения КАНАЛОВ.
При ВРК поднесущими являются импульсные колебания, ортогональные во времени.
Принцип работы передающей системы. В передающей аппаратуре производится опрос коммутатора и формируется сигнал, амплитуда которого определяется величиной напряжения, снимаемого с датчиков. Так как сообщение меняется медленно, по сравнению
с частотой опроса, то формируется импульс постоянной амплитуды.
Последовательность опроса всех датчиков за время одного цикла коммутации приводит к формированию амплитудно импульсно модулируемого сигнала (АИМ)
Последовательность всех сигналов представляет собой цикл коммутаций или кадр, код или групповой сигнал.
Период опроса – интервал времени между смежными опросами одного канала.
В принципе в каждом интервале часть его может отводиться для передачи сообщения – это измерительный интервал, а по бокам – защитные интервалы, для того, что бы каналы не влияли друг на друга.
АИМ сигнал не используется для модуляции из-за низкой помехоустойчивости, поэтому в кодере АИМ преобразуется в ПИМ (произвольно имп. модуляция)
ПИМ – ДИМ ( модуляция длительности импульса)
ПИМ – ВИМ (временная имп. модуляция)
ПИМ- ФИМ (фазовая имп. модуляция)
Многоступенчатая модуляция: 1 ступень аим,дим, вим
2 ступень АМ,ЧМ,ФМ
Могут использоваться цифровые сигналы – это сигналы с кодово импульсной модуляцией (КИМ). В каждом интервале может формироваться кодовая группа импульсов, отображающая информацию, для этого используется АЦП, иногда используются помехоустойчивые коды.
При формировании сигналов используются мультиплексоры.
Для формирования АИМ используются маркерные импульсы, синхроимпульсы опроса (канальные), и множество сигналов – каналов.
В приёмнике делается обратное преобразование. Все устройства должны работать синхронно и синфазно.
Можно дополнительно уплотнить 10- 60 каналов.
8.4. Требования предъявляемые к системе синхронизации
Должны обеспечивать надежное разделение каналов.
Точное определение границ каналов и символов.
Время вхождения в синхронизм и удержание синхронизма.
Введение в синхроимпульсов в групповой сигнал не должно сказываться на снижении скорости передачи.
Возможно несколько алгоритмов синхронизации.



Общая схема выделения синхроимпульсов
КОД
Груп. Сигн.
Селектор
Обнар СИ
Внешний СИ
Инерционный
генератор
Внутр
СИ
Инерционность генератора д.б. достаточно большой, что бы при сбое сигнала работа декодирующего устройства не срывалась. Но инерциальность не должна быть большой из –за большого времени вхождения в синхронизм. Во вторых из – за расхождения частот генераторов передающей и приемной аппаратуры при пропадании внешних синхроимпульсов выделения информационных сигналов сопровождается большими ошибками.
8.5 Символьная синхронизация
В цифровых системах формируются сигналы, обозначающие границы символов.
Структурная схема символьной синхронизации

8.6 Синхронизация слов (каналов)
Сигналы синхронизации в код не включается Аналоговые сигналы
0 имп. использ для синхрон и выделения
Для выделения 0 и послед сдвигают на 1 (единицу) интервал и подают на схему совпадения.
Возможные ошибки если расстояние между имп. равно Тк то и Имп будут выделены как опорные нули 0, однако, если на интервал Тк
Появл более одного сигнала синхр, значит есть ошибка и формир внутрин синхр прекращается
Система не сразу входит в синхронизм и не сразу выходит
Исп дифферен и получит имп синхронизации.
Цифровые системы
КИМ В соседних каналах сообщения не коррелированы
Алгоритм выделения заключается в использовании регулярности следования СИ.
При выделении сигналов символьный синхр. Производится разделение получаемых последов на N регулярных последовательностей с периодом Тк
1 способ выделение сигнала в течении нескольких слов(м) –где синхро – единиц.
Информация
![]() аi<m
аi<m
Очевидно, что там где передаются синхроимпульсы, тем будет m, а если сигналы то <m
Обнаружение маркерных СИ. Маркер может располагаться в защитных интервале.
Для обнаружения маркера используется фильтр, согласованный с маркерным сигналом. Для синхрониз. используются псевдошумовые сигналы.
Так формируются сигналы командных радиолиний.