

Переходные режимы
Полет летательного аппарата в переходных режимах (набор скорости, торможение, вираж и т.п.) сопровождается длительными или кратковременными ускорениями.
Жидкостный переключатель, как и любое другое маятниковое устройство, реагирует на ускорения.
При наличии ускорений жидкостный переключатель дает сигнал на систему коррекции, вследствие чего ось Z платформы прецессирует к новому положению равновесия, определяемому направлением равнодействующей силы тяжести и инерционных сил. При этом гировертикаль с включенной коррекцией накапливает погрешность со скоростью, в среднем равной 1 – 1,50 за каждую минуту действия ускорения.
При кратковременных ускорениях ось Z платформы из-за маленькой скорости прецессии и небольшого собственного ухода не успевает значительно отклониться от направления истинной вертикали и, следовательно, прибор не накапливает больших погрешностей*.
После прекращения действия ускорения ось Z платформы прецессирует к истинной вертикали приблизительно со скоростью прецессии от коррекции.
Для уменьшения погрешностей при действии длительных односторонних (режим набора скорости, вираж) в приборе предусматривается следующее:
Выключение поперечной коррекции – автоматически от центрального выключателя коррекции типа ВК-53РБ.
Возможность выключения продольной коррекции с помощью специальных устройств.
При выключенной коррекции прибор накапливает погрешность со скоростью собственного ухода, равной 0,2 – 0,3 град/мин. Величина этого ухода в режиме виража и рысканья может возрасти за счет увеличения моментов несбалансированности вокруг осей прецессии при действии линейных перегрузок и вследствие действия гироскопических моментов относительно тех же осей, возникающих при отклонениях осей собственного вращения гироскопов от нормальной оси Z платформы.
Погрешности потенциометрических датчиков
Потенциометрические датчики ЦГВ имеют линейную характеристику при условии бесконечно большой нагрузки в электрической цепи съема сигнала.
Линейность характеристики искажается ступенчатостью, вызываемой наличием витков (методическая погрешность) и погрешностями изготовления.
Разрешающая способность потенциометрических датчиков ЦГВ определяемая углом поворота щетки, необходимым для того, чтобы произошло изменение выходного сигнала, составляет 12 – 15 угловых минут.
Погрешности, возникающие в процессе изготовления потенциометрических датчиков, обусловленные неравномерностью намотки, колебаниями омического сопротивления проволоки, неточностью изготовления каркаса и т.п., не превышают 0,50 в пределах рабочих углов.
В пределах малых углов измерения (±50) погрешность в линейности характеристики практически не превышает 15 угловых минут.
Электросхема гироскопической части цгв
Гироскопическая часть прибора питается переменным трехфазным током напряжением 36 в 400 гц (или 40 в 500 гц) от преобразователя типа ПТ со стабилизированной частотой.
Трехфазный переменный ток подводится к элементам схемы через 30-клеммный штепсельный разъем Ш прибора, две группы коллекторных колец КП1 и КП2, расположенных на осях карданного подвеса, и поступает к гиромоторам через гибкие волосковые токопроводы (на схеме не указаны).
Гиромоторы М1 и М2 представляют собой асинхронные высокооборотные электродвигатели. Обмотка ротора каждого гиромотора выполнена в виде короткозамкнутой «беличьей клетки». Статорные обмотки, соединенные в «звезду», включены параллельно друг другу и подключены к трехфазной линии питания.
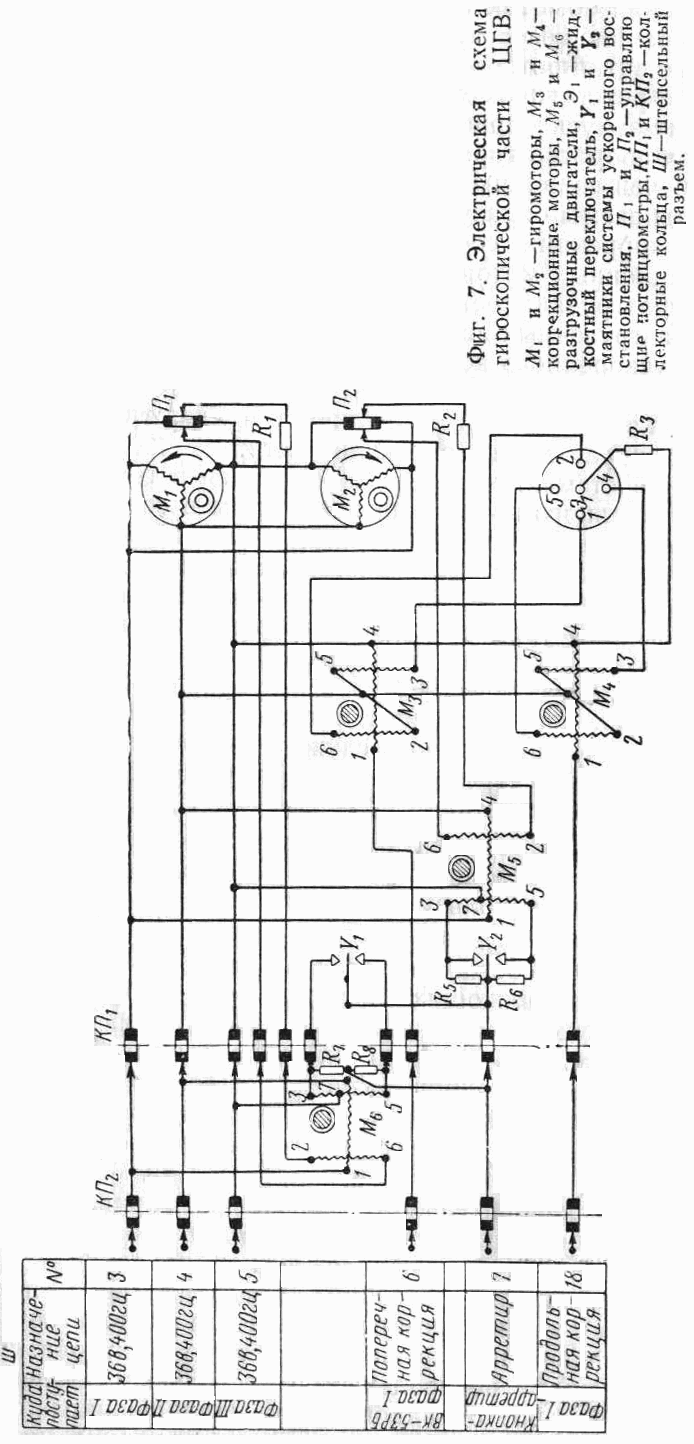
При питании обмоток трехфазным переменным током в статоре возникает вращающееся магнитное поле, которое пересекает короткозамкнутые витки ротора и создает крутящий момент, приводящий во вращение ротор гиромотора.
В момент запуска прибора ток в фазе достигает 2,3 – 2,5 а. По мере набора оборотов гиромоторами ток в фазе уменьшается и достигает рабочей величины 0,8 – 1,1 а.
Элементы схемы образуют три системы:
систему коррекции, состоящую из жидкостного переключателя Э1 и коррекционных моторов М3 и М4;
систему разгрузки, состоящую из управляющих потенциометров П1 и П2 и разгрузочных двигателей М5 и М6;
систему ускоренного восстановления, состоящую из маятников Y1 и Y2 и разгрузочных двигателей М5 и М6.
Система коррекции восстанавливает и удерживает платформу прибора по направлению вертикали места.
Действие системы коррекции заключается в том, что при нарушении вертикального положения платформы в системе создаются моменты, вызывающие движение платформы к вертикали.
Чувствительным элементом системы коррекции служит жидкостный переключатель Э1, работающий по принципу двухплоскостного пузырькового уровня, вырабатывающего электрические сигналы. Электроды жидкостного переключателя, обозначенные цифрами 1,2,4 и 5, электрически связаны с управляющими обмотками соответствующих коррекционных моторов М3 и М4. Центральный электрод 3, в качестве которого служит корпус жидкостного переключателя, соединен через балластное сопротивление R3 с фазой III трехфазной линии питания.
Исполнительными элементами системы коррекции являются мотор поперечной коррекции М3 и мотор продольной коррекции М4, в качестве которых используются двухфазные индукционные двигатели типа ДИД-0,5Р.
Статор ДИД-0,5 состоит из трех обмоток: обмотки возбуждения 1–4 и двух управляющих обмоток 2 – 6 и 3 – 5.
Обмотки возбуждения 1 – 4 моторов М3 и М4 включены между фазами I и III. Фаза I поступает через штырьки 6 и 18 штепсельного разъема прибора. Управляющие обмотки 3 – 5 и 2 – 6 в каждом моторе соединены последовательно, выводы 2 и 5 обмоток подключены к фазе II, а выводы 3 и 6 соединены с соответствующей парой электродов жидкостного переключателя.
Благодаря последовательному включению управляющих обмоток, при котором конец первой обмотки соединен с началом второй, по ним протекают токи противоположных направлений.
Пока платформа прибора занимает вертикальное положение пузырек воздуха в жидкостном переключателе располагается в центре и в равной степени перекрывает все четыре электрода. При этом проводимость между центральным и остальными электродами (3– 1, 3 – 2, 3 – 4, 3 – 5) одинакова и по управляющим обмоткам моторов М3 и М4 протекают токи, равные по величине, но противоположно направленные. Действие их на соответствующий мотор взаимоуничтожается и суммарный вращающий момент каждого мотора равен нулю.
* Зависимость сигнала жидкостного переключателя от угла наклона платформы приведена в разд. IV.
* Скорость коррекции ЦГВ в несколько раз меньше скорости коррекции обычных одногироскопных вертикалей.