

18. Частотные критерии устойчивости. Критерий Михайлова.
Критерий устойчивости Михайлова: Для того, чтобы САУ была устойчива, необх. и дост., чтобы вектор кривой Михайлова P(jω) при изменении частоты ω от 0 до ∞ повернулся, нигде не обращаясь в нуль, вокруг начала координат против часовой стрелки на угол πn/2, где n - порядок хар. полинома сис-мы.
Замечание. Для устойч. ЗСАУ годограф Михайлова начинается при ω=0 на веществ. положит. полуоси U(ω), так как при a0 > 0 все коэф-ты хар. полинома положительны и P(0)=an>0. Кроме того, для устойч. сис-м, описываемых обыкновенными дифурами с постоянными коэф-тами, аргумент φ(ω) комплексного числа P(jω) с ростом частоты ω должен возрастать монотонно, т.е. вектор P(jω) должен поворачиваться только против ЧС. Это следует из того, что с ростом частоты монотонно возрастают имеющие одинаковые (положит.) знаки аргументы элементарных векторов (jω–si), кот. являются слагаемыми аргумента вектора P(jω). Учитывая сказанное, критерий Михайлова:
Для того чтобы САУ была устойчивой, необх. и достат., чтобы годограф Михайлова при изм. ω от 0 до ∞, начинась при ω=0 на вещественной полуоси, обходил только против ЧС последовательно n квадрантов корд-ной пл-ти, где n - порядок хар. полинома сис-мы.
Признаком неустойчивости системы является нарушение числа и последовательности, пройденных кривой Михайлова квадрантов координатной плоскости, вследствие чего угол поворота вектора P(jω) оказывается меньшим, чем πn/2.
Анализируя годографы Михайлова, можно установить, что при последовательном прохождении кривой Михайлова квадрантов корд-ной пл-ти вещественная и мнимая оси пересекаются ею поочередно. В точках пересечения кривой Михайлова с вещественной осью обращается в нуль мнимая ф-ия Михайлова V(ω), а в точках пересечения с мнимой осью обращается в нуль вещественная ф-ия U(ω). Поэтому значения частот, при которых происходит пересечение кривой с вещественной или мнимой осью, должны являться корнями уравнений U(ω)=0 и V(ω)=0.
Вещественную U(ω) и мнимую V(ω) функции Михайлова можно представить графически в виде кривых:


19. Частотные критерии устойчивости. Критерий Найквиста.
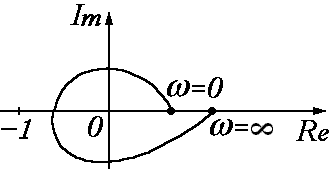
Критерий Найквиста: Если разомкнутая САУ неуст., то, для того чтобы ЗСАУ была уст., необх. и достат. чтобы АФХ разомк. сис-мы W(jω) при измен. ω от 0 до ∞ охватывала точку {-1,j0} в положит. положении l/2 раз, где l – число корней хар. ур-я РСАУ.
При сложной W(jω) могут возникнуть трудности при определении числа оборотов вокруг критич. точки {-1,j0}. В этом случае для суждения об устойчивости следует воспользоваться «правилом переходов», предложенным Цыпкиным.
Критерий Найквиста: Если РСАУ неуст., то для того чтобы ЗСАУ была уст. необх. и достат., чтобы разность между числом положительных и отриц. переходов АФХ РСАУ W(jω) через отрезок (-∞,-1) при изменении ω от 0 до ∞ была равна l/2 раз
20. Логарифмический критерий устойчивости.
Логарифмический критерий устойчивости применяется при исследовании сложных многоконтурных систем, при построении ЛАЧХ корректирующих звеньев, выводящих исходную систему из неустойчивого состояния. Базовым для логарифмического критерия устойчивости является критерий Найквиста.
По критерию Найквиста, базовая точка (-1;0) в комплексной плоскости.

Рассмотрим АФХ разомкнутой системы в двух случаях:
1. АФХ первого рода, когда система в разомкнутом состоянии устойчива.
Это
означает, что годограф такой системы
не пересекает отрезок
![]() .
.
С

2

Для АФХ второго рода логарифмический критерий устойчивости заключается в следующем: при положительных значениях ЛАЧХ до частоты среза, количество переходов прямой - ФЧХ должно быть равно нулю (т.е. количество положительных переходов равно количеству отрицательных
21. Прямые показатели качества регулирования.
Качество САУ определяется следующими показателями:
Время достижения установившегося режима – такое время, по истечение которого для управляемой величины выполняется условие:
![]()

где у – управляемая величина; р – некоторая величина (для САУ 5% от установившегося режима).
Время переходного процесса –отрицательное время, при котором переходный процесс по выходной координате достигает 5%-ной зоны от устойчивого значения.
Перерегулирование - это процентное соотношение разницы максимального перерегулирования и установившегося значения:
![]() .
.
2. а) Время максимального перерегулирования (tперерег), такое время, при котором выходная величина достигает своего максимального по модулю значения:
![]() .
.
2. б) Число перерегулирований – это количество раз, когда управляемая величина превышает по модулю значение:
![]() .
.
Колебательность () - кол-во колебаний, приходящихся на отрезок времени переходного процесса.
Ошибка в установившемся режиме (точность САУ)
![]() .
.
Д

Для астатических систем:
П

Для анализа показаний качества управления могут быть использованы прямые и косвенные методы оценки. Прямые методы определения качества базируются на исследовании переходного процесса, дают наиболее достоверную информацию с последующим определением показаний качества. Но они являются самыми трудоемкими. Косвенные методы определения качества позволяют по косвенным признакам, не решая ни дифференциальных, ни характеристических уравнений, получить приближенный переходный процесс с приближенными показателями качества.
Пропорциональный алгоритм регулирования (П-алгоритм).
Это простейший алгоритм, который реализуется при помощи безинерционного звена с передаточной функцией
![]() (4.15)
(4.15)
Так как управляющее воздействие пропорционально сигналу ошибки
![]() (4.16)
(4.16)
то и алгоритм получил название пропорционального, а регулятор – П-регулятора.
Преимущества П-регулятора – простота и быстродействие, недостатки – ограниченная точность (особенно при управлении объектами с большой инерционностью и запаздыванием).
Интегральный алгоритм регулирования (И-алгоритм).
Этот алгоритм реализуется при помощи интегрального звена с передаточной функцией
![]() (4.17)
(4.17)
Так как управляющее воздействие пропорционально интегралу сигнала ошибки
![]() (4.18)
(4.18)
то и алгоритм получил название интегрального, а регулятор И-регулятора.
При интегральном алгоритме регулирования управляющее воздействие y в каждый момент времени пропорционально интегралу от сигнала ошибки . Поэтому И-регулятор реагирует главным образом на длительные отклонения управляемой величины x от заданного значения xз. Кратковременные отклонения сглаживаются таким регулятором.
Преимущества И-регулятора – лучшая (по сравнению с П-регулятором) точность в установившихся режимах, недостатки – худшие свойства в переходных режимах (меньшее быстродействие и более высокая колебательность).
Пропорционально-интегральный алгоритм регулирования (ПИ-алгоритм).
Этот алгоритм реализуется при помощи регулятора с передаточной функцией
![]() (4.19)
(4.19)
Так как управляющее воздействие пропорционально как самому сигналу ошибки, так и его интегралу
![]() (4.20)
(4.20)
то алгоритм получил название пропорционально-интегрального, а регулятор – ПИ-регулятора.
Благодаря наличию интегральной составляющей в алгоритме, ПИ-регулятор обеспечивает высокую точность в установившихся режимах, а при определенном соотношении коэффициентов kП и kИ обеспечивает хорошие показатели и в переходных режимах. Поэтому он получил наибольшее распространение в промышленной автоматике.
Пропорционально-дифференциальный алгоритм регулирования (ПД-алгоритм).
Этот алгоритм реализуется при помощи регулятора с передаточной функцией
![]() (4.21)
(4.21)
Так как управляющее воздействие пропорционально как самому сигналу ошибки, так и его производной
![]() (4.22)
(4.22)
то алгоритм получил название пропорционально-дифференциального, а регулятор – ПД-регулятора.
ПД-регулятор реагирует не только на величину сигнала ошибки, но и на скорость его изменения. Благодаря этому при регулировании достигается эффект упреждения. Недостатком ПД-регулятора является невозможность обеспечения высокой точности регулирования.
Пропорционально-интегрально-дифференциальный алгоритм регулирования (ПИД-алгоритм).
Этот алгоритм реализуется при помощи регулятора с передаточной функцией
![]() (4.23)
(4.23)
Так как управляющее воздействие пропорционально как самому сигналу ошибки, так и его интегралу и производной
![]() (4.24)
(4.24)
то алгоритм получил название пропорционально-интегрально-дифференциального, а регулятор – ПИД-регулятора.
ПИД-алгоритм – наиболее гибкий алгоритм регулирования (в классе линейных алгоритмов). Он сочетает в себе преимущества более простых выше рассмотренных алгоритмов.
Коэффициенты kП, kИ, kД, входящие в передаточные функции типовых регуляторов, подлежат настройке при наладке АСУ и поэтому называются настроечными параметрами. Они имеют наименования: kП, kИ, kД - коэффициенты пропорциональной, интегральной и дифференциальной частей АСУ.