

3. Классификация колебательных процессов
С
 вободные
колебания.
Свободные
колебания
совершаются при отсутствии переменного
внешнего воздействия, без притока
энергии извне. Такие колебания могут
происходить лишь в автономных системах
(рис. 1).
вободные
колебания.
Свободные
колебания
совершаются при отсутствии переменного
внешнего воздействия, без притока
энергии извне. Такие колебания могут
происходить лишь в автономных системах
(рис. 1).
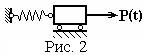
В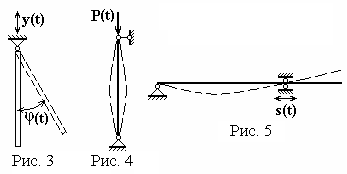 ынужденные
колебания.
Такие колебания имеют место в неавтономных
системах, и их источниками являются
переменные внешние воздействия (рис.
2).
ынужденные
колебания.
Такие колебания имеют место в неавтономных
системах, и их источниками являются
переменные внешние воздействия (рис.
2).
Параметрические колебания. Параметры колебательной системы могут изменяться во времени, и это может стать источником колебаний. Такие колебания называются параметрическими. Верхняя точка подвеса физического маятника (рис. 3) совершает колебания в вертикальном направлении y(t), вследствие чего маятник совершает параметрические колебания вокруг шарнира. На вертикальный стержень в продольном направлении действует периодическая сила P(t), вызывая поперечные колебания стержня (рис. 4). Правая опора балки колеблется в горизонтальном направлении по закону s(t), что служит причиной возникновения поперечных параметрических колебаний (рис. 5).
А втоколебания
(самовозбуждающиеся
колебания). У таких колебаний источники
имеют неколебательную природу, и при
этом сами источники включены в
колебательную систему. На рис. 6 показана
масса на пружине, лежащая на движущейся
ленте. На неё действуют две силы: сила
трения и упругая сила натяжения пружины,
и они меняются во времени. Первая зависит
от разности скоростей ленты и массы,
вторая от величины и знака деформации
пружины, поэтому масса находится под
воздействием равнодействующей силы,
направленной то влево, то вправо и
совершает колебания.
втоколебания
(самовозбуждающиеся
колебания). У таких колебаний источники
имеют неколебательную природу, и при
этом сами источники включены в
колебательную систему. На рис. 6 показана
масса на пружине, лежащая на движущейся
ленте. На неё действуют две силы: сила
трения и упругая сила натяжения пружины,
и они меняются во времени. Первая зависит
от разности скоростей ленты и массы,
вторая от величины и знака деформации
пружины, поэтому масса находится под
воздействием равнодействующей силы,
направленной то влево, то вправо и
совершает колебания.
Во втором примере (рис. 7) левый конец пружины перемещается вправо с постоянной скоростью v, вследствие чего пружина перемещает груз по неподвижной поверхности. Образуется ситуация, подобная описанной для предыдущего случая, и груз начинает колебаться.
4. Кинематика периодических колебательных процессов
Пусть
процесс характеризуется одной скалярной
переменной u(t),
являющейся, например, перемещением.
Тогда
![]() - скорость,
- скорость,
![]() - ускорение. Если существует такое число
Т, что для
любого t
выполняется условие
- ускорение. Если существует такое число
Т, что для
любого t
выполняется условие
u(t + T) = u(t),
т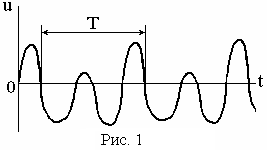 о
колебания называются периодическими
(рис. 1). При
этом наименьшее из таких чисел называется
периодом
колебаний.
Единицей измерения периода колебаний
является, чаще всего, секунда, обозначаемая
с или сек. Употребляются ещё единицы
измерения в минутах, часах и т. д. Другой,
также важной характеристикой периодического
колебательного процесса является
частота
колебаний
о
колебания называются периодическими
(рис. 1). При
этом наименьшее из таких чисел называется
периодом
колебаний.
Единицей измерения периода колебаний
является, чаще всего, секунда, обозначаемая
с или сек. Употребляются ещё единицы
измерения в минутах, часах и т. д. Другой,
также важной характеристикой периодического
колебательного процесса является
частота
колебаний
f =
1/T (c![]() ),
),
определяющая количество полных циклов колебаний за 1 единицу времени (например, в секунду). Такая частота измеряется в с-1 или герцах (Гц), так что f = 5 Гц означает 5 полных циклов колебаний за одну секунду. В математических выкладках теории колебаний более удобной оказывается угловая частота
![]() f
=2
f
=2![]() ,
,
измеряемая в c или, что то же самое, в рад/сек. Она часто называется также круговой частотой.
Резюмируя можно сказать, что период колебаний и указанные частоты связаны соотношениями
Т = 1/f
= 2![]() .
.
Наиболее простыми из периодических колебаний, но чрезвычайно важными для построения теоретической базы теории колебаний являются гармонические (синусоидальные) колебания, изменяющиеся по закону
u(t)
= Asin![]() ,
(1)
,
(1)
где
А – амплитуда,
![]() -
фаза колебаний,
-
фаза колебаний,
![]() - начальная фаза. Период таких колебаний
Т=2
.
Дифференцируя
(1), можно сначала найти скорость движения
- начальная фаза. Период таких колебаний
Т=2
.
Дифференцируя
(1), можно сначала найти скорость движения
v =
du/dt =
![]() A
cos
,
A
cos
,
а затем и ускорение
w =
d![]() u/dt
= -
u/dt
= -
![]() sin
.
sin
.
Вместо (1) часто пользуются альтернативной записью
u(t)
= A cos![]() ,
(2)
,
(2)
где
![]() .
Описания (1) и (2) могут быть представлены
и в виде
.
Описания (1) и (2) могут быть представлены
и в виде
u(t) = a
cos![]() b
sin
b
sin![]() .
(3)
.
(3)
Между константами в формулах (1), (2), (3) существуют легко доказуемые соотношения
А =
![]() tg
tg![]() a
/ b, tg
a
/ b, tg
![]() = - b / a, а
= А sin
=A
cos
,
b = A cos
=
- A sin
.
= - b / a, а
= А sin
=A
cos
,
b = A cos
=
- A sin
.
Использование методов и представлений теории функций комплексных переменных во многом упрощает описание колебаний. Центральное место в таком случае занимает формула Эйлера
еiωt
= cos![]() sin
.
sin
.
Здесь
i
=
![]() – мнимая
единица.
Тогда колебательный процесс имеет
комплексное представление
– мнимая
единица.
Тогда колебательный процесс имеет
комплексное представление
u(t) = A ei(ωt +φ). (4)
Формулы (1) и (2) содержатся в (4). Например, синусоидальные колебания (1) можно представлять как мнимую составляющую (4)
u(t) =A sin = Im [A ei(ωt +φ)],
а (2) - в виде вещественной составляющей
u(t) =A
cos![]() = Re [A ei(ωt
+ψ)]
.
= Re [A ei(ωt
+ψ)]
.
Полигармонические колебания. Сумма двух гармонических колебаний с одинаковыми частотами будет гармоническим колебанием с той же частотой
А![]() cos
cos![]() cos
cos![]() cos
cos![]()
A=![]() ,
tg
,
tg![]() .
.
Слагаемые могли быть и с неодинаковыми частотами
u(t)
= A
cos![]() A
A![]() cos
cos![]() .
(5)
.
(5)
Тогда
сумма (5) будет периодической функцией
с периодом Т = 2
,
лишь в том случае,
если
![]() m
,
m
,
![]() =
n
,
где m
и n
– целые числа, причём m/n
– несократимая дробь, рациональное
число. Вообще же, если два и более
гармонических колебаний имеют частоты
с соотношениями в виде рациональных
дробей, то их сумма также является
гармоническими колебаниями. Такие
колебания называются полигармоническими.
=
n
,
где m
и n
– целые числа, причём m/n
– несократимая дробь, рациональное
число. Вообще же, если два и более
гармонических колебаний имеют частоты
с соотношениями в виде рациональных
дробей, то их сумма также является
гармоническими колебаниями. Такие
колебания называются полигармоническими.
Если периодические колебания не гармонические, то всё же их зачастую выгодно представлять в виде гармонических колебаний с помощью ряда Фурье
u(t)
=
![]() .
(6)
.
(6)
Здесь
a![]() - коэффициенты Фурье, k
– номер гармоники, a0
характеризует среднее значение
отклонений,
- коэффициенты Фурье, k
– номер гармоники, a0
характеризует среднее значение
отклонений,
![]() ,
a
,
a![]() - первая, основная гармоника, a
- первая, основная гармоника, a![]() (k >1)
– высшие гармоники, множество k
(k >1)
– высшие гармоники, множество k![]()
![]() k
= 1, 2,… образует
частотный
спектр колебаний.
k
= 1, 2,… образует
частотный
спектр колебаний.
П р и м е ч а н и е. Теоретическим обоснованием возможности представления функции колебательного процесса рядом Фурье служит теорема Дирихле для периодической функции:
Если функция f(t)
задана на сегменте
![]() и является на нём кусочно-непрерывной,
кусочно-монотонной и ограниченной, то
её ряд Фурье сходится во всех точках
сегмента
и является на нём кусочно-непрерывной,
кусочно-монотонной и ограниченной, то
её ряд Фурье сходится во всех точках
сегмента
![]() .
.
Если s(t) – сумма тригонометрического ряда Фурье функции f(t), то во всех точках непрерывности этой функции
s(t) = f(t),
а во всех точках разрыва
s(x)
=
![]() [ f(t - 0)+f(t
+ 0) ].
[ f(t - 0)+f(t
+ 0) ].
Кроме того,
s(![]() )
= s(
)
= s(![]() ) =
[
f( π - 0)+f(-π
+ 0) ].
) =
[
f( π - 0)+f(-π
+ 0) ].
Очевидно, что реальные колебательные процессы удовлетворяют условиям теоремы Дирихле.
В
частотном спектре каждой частоте
соответствует амплитуда Аk
и начальная фаза
![]()
A![]() ,
,
![]() .
.
Они
образуют амплитудный
спектр
![]() и фазовый
спектр
и фазовый
спектр
![]() .
Наглядное представление об амплитудном
спектре даёт рис. 2.
.
Наглядное представление об амплитудном
спектре даёт рис. 2.
О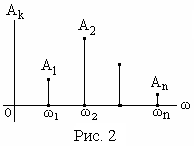 пределение
спектра частот
пределение
спектра частот
![]() и коэффициентов Фурье
и коэффициентов Фурье
![]() называется спектральным
анализом.
Из теории рядов Фурье известны формулы
называется спектральным
анализом.
Из теории рядов Фурье известны формулы
![]() ,
,
![]() ,
,
![]() ,
k = 1, 2,…
,
k = 1, 2,…
Для представления колебательных процессов часто используются комплексные ряды Фурье в виде
![]() .
(7)
.
(7)
Здесь коэффициенты Фурье являются комплексными числами
![]()
 ,
,
![]()
Звёздочка означает переход к комплексно-сопряжённой величине. Между коэффициентами рядов Фурье (6) и (7) существуют соотношения (рис. 3)
с![]() ,
,
![]() ,
φ = arg c
,
φ = arg c![]() .
.