

11. Перелет между некомпланарными орбитами
Космический аппарат, оснащенный нерегулируемым двигателем малой тяги, должен совершить некомпланарный перелет с низкой круговой на высокую круговую орбиту, имеющие разные наклонения плоскости к экватору. Двигатель в процессе перелета работает постоянно.
В течение одного оборота вокруг Земли вектор тяги в пространстве постоянно ориентирован так, что создается управляющее ускорение вдоль переходной орбиты и по нормали к ее плоскости. При этом переходная траектория представляет собой раскручивающуюся спираль. Переходную траекторию аппроксимируем последовательностью круговых орбит радиуса rk
Уравнения движения в безразмерных переменных для рассматриваемого случая имеют следующий вид1
![]()
где
![]() – безразмерный радиус в начале k-го
витка; ik
– наклонение к плоскости экватора;
– безразмерный радиус в начале k-го
витка; ik
– наклонение к плоскости экватора;
Vk – безразмерная круговая скорость; tk – безразмерное время.
Заметим, что
![]() есть безразмерный период обращения на
k –м витке.
есть безразмерный период обращения на
k –м витке.
Требуется определить последовательность
![]() ,
и число N, которые доставляют
минимум времени перелета (при постоянно
работающем двигателе это эквивалентно
минимизации затрат топлива) при следующих
терминальных условиях:
,
и число N, которые доставляют
минимум времени перелета (при постоянно
работающем двигателе это эквивалентно
минимизации затрат топлива) при следующих
терминальных условиях:
![]() ,
, ![]() ,
, ![]() ,
,
где r* и i* – заданные значения безразмерного радиуса конечной орбиты и наклонения.
Для учета терминальных требований рекомендуется ввести в рассмотрение квадратичный штраф
![]() ,
,
где
![]() ,
,
![]() ,
,
![]() –
весовые множители.
–
весовые множители.
Начальные условия:
![]() ;
i1 = 60о;
;
i1 = 60о;
Конечная орбита: r* = 2…6; i* = 0..50о;
Безразмерное ускорение a = 0.0001…0.001.
12. Разгон до параболической скорости при минимальном времени работы ду
Космический аппарат, оснащенный нерегулируемым двигателем малой тяги, стартует с начальной круговой орбиты и должен разогнаться до параболической скорости.
Уравнения движения в безразмерных переменных имеют вид2:
где r – радиус; u – радиальная скорость; v – трансверсальная скорость; φ – полярный угол, a – постоянное реактивное ускорение; λ – угол, определяющий ориентацию вектора тяги двигателя в плоскости орбиты; tM – моторное время;
![]() .
.
Требуется найти функции
![]() и
и
![]() ,
которые обеспечивают минимум времени
работы двигателя при заданном времени
разгона tk
и при условии достижения параболической
скорости в момент времени t
= tk:
,
которые обеспечивают минимум времени
работы двигателя при заданном времени
разгона tk
и при условии достижения параболической
скорости в момент времени t
= tk:
![]() .
.
13. Оптимизация траектории движения носителя
Допущения: – аэродинамические силы отсутствуют;
– гравитационное поле – плоско-параллельное;
– Земля не вращается.
Модель движения в начальной стартовой системе координат:
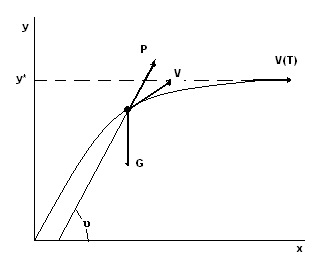
,
где h – высота;
m – масса ЛА;
P – сила тяги двигателя;
J – удельный импульс;
β – секундный расход топлива;
βm – максимально возможный расход топлива;
g – ускорение силы тяжести;
g0 – ускорение силы тяжести на поверхности планеты;
RP – радиус планеты.
Используя необходимые условия оптимального
управления, найти программы управления
вектором тяги
и расходом топлива,
![]() ,
которые обеспечат максимум горизонтальной
скорости на заданной высоте y*
при минимальных затратах топлива.
,
которые обеспечат максимум горизонтальной
скорости на заданной высоте y*
при минимальных затратах топлива.
14. Оптимизация траектории движения носителя
Допущения: – аэродинамические силы отсутствуют;
– гравитационное поле – плоско-параллельное;
– Земля не вращается.
Модель движения в начальной стартовой системе координат:
,
где h – высота;
m – масса ЛА;
P – сила тяги двигателя;
J – удельный импульс;
β – секундный расход топлива;
βm – максимально возможный расход топлива;
g – ускорение силы тяжести;
g0 – ускорение силы тяжести на поверхности планеты;
RP – радиус планеты.
Программа управления задана в
параметрической форме
![]() .
.
Требуется найти параметры , , при которых достигается максимум горизонтальной скорости на заданной высоте y* при минимальных затратах топлива.