

4. 2. Пространство состояний.
Свойства систем, поведение которых описывают уравнения (1) - (4), можно интерпретировать графически в ортогональном пространстве размерности n. Такое пространство, координатами которого являются переменные состояния х, называется пространством состояний.
Рассмотрим, как представляется в пространстве состояний поведение системы (1)
![]() ,
,
при условии, что u = const. Для системы второго порядка
Состоянию
системы в произвольный момент времени
соответствует конкретная точка
пространства состояний
![]() ,
которая называется изображающей
точкой системы
(рис.
1). С изменением времени эта точка
выписывает траекторию, называемую
фазовой
траекторией системы.
,
которая называется изображающей
точкой системы
(рис.
1). С изменением времени эта точка
выписывает траекторию, называемую
фазовой
траекторией системы.
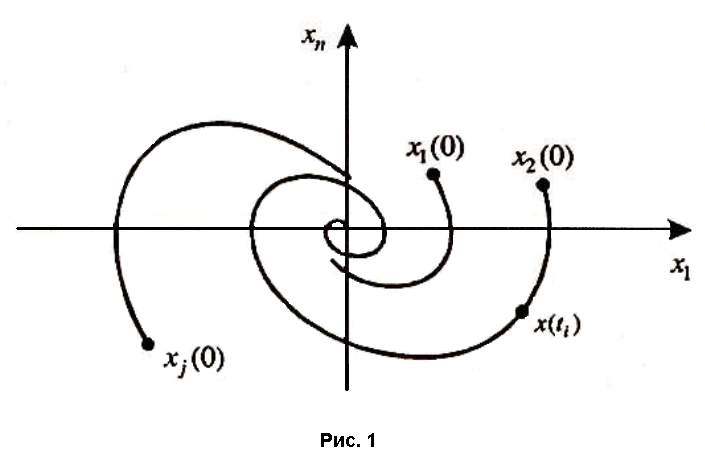
Совокупность фазовых траекторий, полученных при движении из различных начальных состояний, называют фазовым портретом системы. Он позволяет оценить свойства нелинейной системы.
В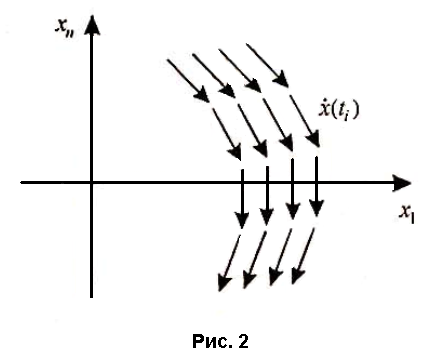 каждый момент времени изображающая
точка системы
имеет
определенную скорость
каждый момент времени изображающая
точка системы
имеет
определенную скорость
![]() ,
которую
также можно изобразить в пространстве
состояний в виде вектора
скорости,
имеющего
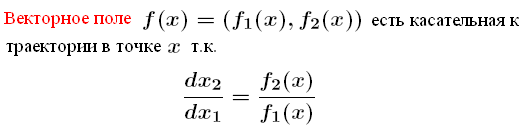
определенное направление. Совокупность
векторов скорости будем называть
векторным
полем системы
(рис.
2.). Для системы втого порядка
,
которую
также можно изобразить в пространстве
состояний в виде вектора
скорости,
имеющего
определенное направление. Совокупность
векторов скорости будем называть
векторным
полем системы
(рис.
2.). Для системы втого порядка
Точки пространства состояний, в которых вектор скорости равен нулю
![]() ,
(5)
,
(5)
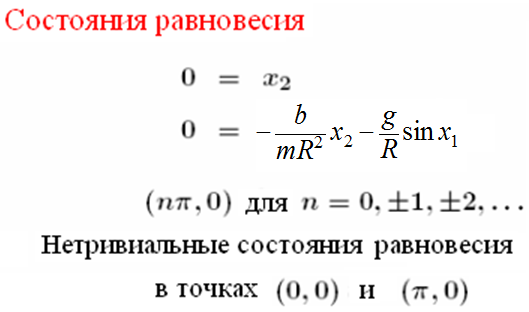
представляют собой точки или состояния равновесия (особые точки) системы.
Пример. Маятник при M =0 описываются уравнениями
Отметим, что в пространстве состояний можно также исследовать свойства линейных систем, рассмотренных в предыдущих разделах.
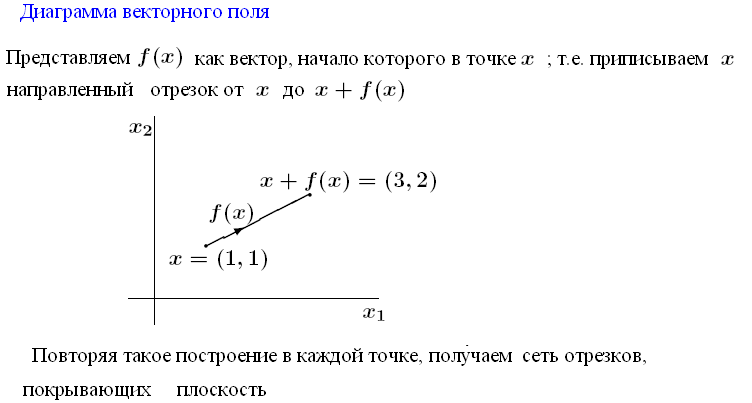
Пример. Для системы, описываемой уравнениями
векторное поле выглядит, как показано на рис. ниже

4. 3. Структурная расчетная схема нелинейной системы.
При составлении математической модели процессов в системе управления предварительно получают описание отдельных элементов в виде соответствующих уравнений, причем по возможности их стараются линеаризовать. Звенья, уравнения которых допускают линеаризацию, образуют линейную часть системы, а устройства, поведение которых описывают нелинейные уравнения, составляют ее нелинейную часть. В результате получают расчетную структурную схему нелинейной системы (рис. 3).
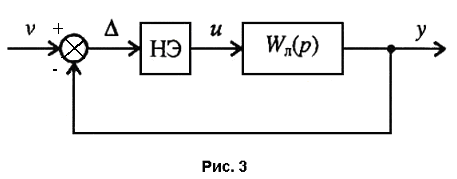
Здесь НЭ - нелинейная часть системы, которая представляет собой совокупность всех нелинейных звеньев. Часто в расчетной структуре в качестве НЭ рассматривается статическая нелинейность, где зависимость между входной и выходной величинами описывается алгебраическим соотношением
![]() .
(6)
.
(6)
Лекция 23
Примеры типовых статических нелинейных звеньев приведены на рис. 4.

Линейная часть системы может иметь структуру любой сложности и описывается передаточной функцией Wл(p).
4. 4. Особенности процессов в нелинейных системах.
Рассмотрим наиболее характерные особенности процессов в нелинейных системах.
• В нелинейных
системах вид и качество переходного
процесса существенно зависят от величины
входного воздействия и начальных
условий. Так, увеличение входного
воздействия (рис. 5) приводит к качественному
изменению переходного процесса: из
устойчивого он становится неустойчивым.
В нелинейных
системах вид и качество переходного
процесса существенно зависят от величины
входного воздействия и начальных
условий. Так, увеличение входного
воздействия (рис. 5) приводит к качественному
изменению переходного процесса: из
устойчивого он становится неустойчивым.
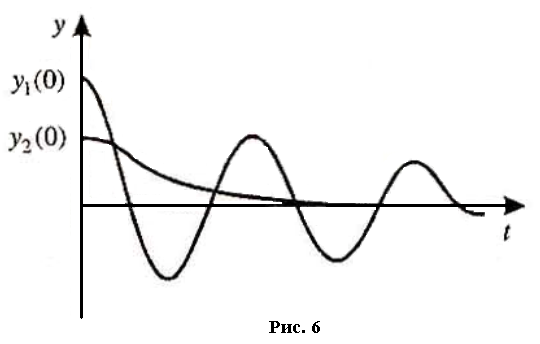
Изменение начальных условий также может приводить к существенному отличию в переходных процессах, например, к возникновению незатухающих колебаний (рис. 6).
• Существенная
особенность нелинейных систем заключается
в том, что к ним неприменим принцип
суперпозиции. Реакцию нелинейной системы
автоматического управления на несколько
произвольных внешних воздействий нельзя
рассматривать как сумму составляющих
на каждое воздействие отдельно, поскольку
эта реакция зависит от величины входного
воздействия и начальных условий.
Существенная
особенность нелинейных систем заключается
в том, что к ним неприменим принцип
суперпозиции. Реакцию нелинейной системы
автоматического управления на несколько
произвольных внешних воздействий нельзя
рассматривать как сумму составляющих
на каждое воздействие отдельно, поскольку
эта реакция зависит от величины входного
воздействия и начальных условий.
• Характерной особенностью нелинейных систем является возможность возникновения в них автоколебаний, т. е. таких собственных периодических процессов, параметры которых (частота и фаза) не зависят от начальных условий.
•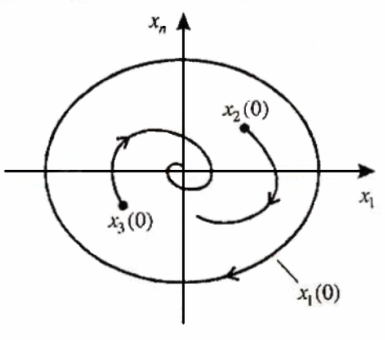 В
нелинейной системе может быть несколько
состояний равновесия, к которым в
зависимости от величины начальных
условий и входных воздействий стремятся
переходные процессы.
В
нелинейной системе может быть несколько
состояний равновесия, к которым в
зависимости от величины начальных
условий и входных воздействий стремятся
переходные процессы.
На рис. 7 показано, что из начального состояния х3(0) движение осуществляется к точке равновесия х=0, а из состояния х1(0) изображающая точка системы движется по замкнутой Рис. 7
траектории, которая называется предельным циклом. Эта фазовая траектория соответствует стационарному режиму работы, так же как и состояния равновесия. Отметим также, что наличие предельного цикла в пространстве состояний означает возможность возникновения в системе автоколебаний.
_
Универсальных аналитических методов исследования нелинейных систем не существует. В процессе развития теории автоматического управления были разработаны различные методы анализа и синтеза нелинейных систем, каждый из которых применим для определенного класса задач. Наиболее широко используемыми методами исследования нелинейных систем являются:
Метод фазовой плоскости;
Метод функций Ляпунова;
Метод гармонической линеаризации;
Метод исследования абсолютной устойчивости;
Метод линеаризации обратной связью (feedback linearization);
Метод скользящего управления (sliding mode);
Mетод обратного шага или попятный метод (backstapping).