

Билет № 8
36.Система управления двигателем и автомобилем, перспективы расширения микропроцессорного управления на автомобильном двиателем.
Системой управления двигателем называется электронная система управления, которая обеспечивает работу двух и более систем двигателя. Система является одним из основных электронных компонентов электрооборудования автомобиля. Генератором развития систем управления двигателем в мире является немецкая фирма Bosch. Технический прогресс в области электроники, жесткие нормы экологической безопасности обусловливают неуклонный рост числа подконтрольных систем двигателя.
Система управления двигателем имеет следующее общее устройство:
- входные датчики; - электронный блок управления; - исполнительные устройства систем двигателя.
Входные датчики измеряют конкретные параметры работы двигателя и преобразуют их в электрические сигналы. Информация, получаемая от датчиков, является основой управления двигателем. Система управления двигателем
Принцип работы системы управления двигателем основан на комплексном управлении величиной крутящего момента двигателя. Другими словами, система управления двигателем приводит величину крутящего момента в соответствия с конкретным режимом работы двигателя.
Система интерактивного вождения (Interactive Driving System - IDS), которая уже успешно применяется и устанавливает новые стандарты устойчивости на дороге, управляемости и активной безопасности, в сочетании с длинной колесной базой Signum обеспечивает превосходные ощущения от вождения.
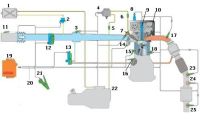
Система управления автомобилем:
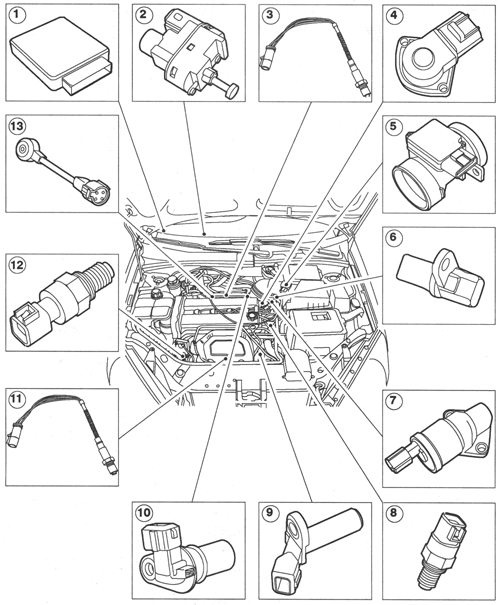
1 — модуль управления силовым агрегатом (РСМ);
2 — датчик положения распределительного вала (СМР);
3 — кислородный датчик мониторинга каталитического нейтрализатора;
4 — датчик положения дроссельной заслонки (ТР);
5 — датчик массового расхода воздуха (MAF);
6 — датчик скорости автомобиля (VSS);
7 — клапан управления подачей воздуха в режиме холостого хода (IAC);
8 — датчик температуры охлаждающей жидкости двигателя (ЕСТ);
9 — датчик положения коленчатого вала (СКР);
10 — датчик положения распределительного вала (СМР);
11 — подогреваемый кислородный датчик (HO2S);
12 — реле давления усилителя рулевого управления (PSP);
13 — датчик детонации (KS)
37. Анализ процесса криволинейного движения автомобиля и его законы.
Автомобили практически все время движутся по криволинейным траекториям. Это объясняется не только тем, что абсолютно прямолинейных участков дорог очень мало, но главное тем, что автомобилю приходится поворачивать с одной дороги или улицы на другую, объезжать, что-либо, сторонится чего-либо, на конец на автомобиль всегда действуют боковые силы, которые изменяют или стремятся изменить траекторию
движения, а водителю приходиться его корректировать. Принято выделять условно прямолинейное движение по траектории с кривизной менее 0,002 м-1 (радиусом кривизны более 500 м), а все остальные движения относятся к криволинейным.
Признаком криволинейного движения является перемещение в плане любых двух точек автомобиля, это возможно когда две точки автомобиля имеют различные по величине или направлению скорости движения. Минимальный радиус поворота служит показателем оценки статической поворотливости автомобиля. Этот показатель наиболее важен, но он не дает исчерпывающей характеристики поворотливости. В ряде случаев важен не только сам факт поворота автомобиля с определенным радиусом, но и за какое время и на какой угол сможет повернуться автомобиль или несколько снижается его скорость в процессе поворота в сравнении с прямолинейным движением. Такие данные характеризуют уже динамическую поворотливость.
Процесс поворота автомобиля состоит из трех этапов:
- переход от прямолинейного движения к криволинейному движению, когда кривизна траектории увеличивается;
- вход в поворот движение с постоянной кривизной, называется равномерный поворот
- возвращение к прямолинейному движению — выход из поворота.
Исследование криволинейного движения автомобиля ведут в двух направлениях:
1. Определение и исследование кинематических параметров: траектории скорости и ускорения движения автомобиля;
2. Определение силовых параметров: крутящих моментов продольных, боковых и нормальных реакций колес, а также сил и моментов возникающих при повороте.
В общем случае, колесные машины могут совершать поворот тремя основными способами:
1. Изменением углов между плоскостями вращения колес и продольной осью машины за счет поворота управляемых колес.
2. Изменением этих же углов за счет изменения положения одной части машины относительно другой (сочлененные машины).
3. Изменения величины скоростей колес разных сторон (левый и правый). Так совершают поворот гусеничные машины. Этот способ называется бортовым поворотом.