

Интерфейсы оборудования транспортных сетей и их характеристики (агрегатные, компонентные, синхронизации, управления, электрические, оптические).
Интерфейс – граница между двумя взаимодействующими системами или устройствами, определяемая общими функциональными и конструктивными характеристиками, требованиями к протоколам обмена.
Электрические и оптические интерфейсы определены стандартами международных организаций ITU-T (МСЭ-Т), IEEE, OSI, RFC, IEC и т.д. Стандарты закрепляют физическую и логическую (протокольную) структуру интерфейсов, которая должна соблюдаться всеми производителями техники связи.
В физической структуре интерфейсов указываются возможности передатчиков и приёмников при их подключении к линии, форматы сигналов, линейное кодирование, типы разъёмов, волновое сопротивление, маски импульсных сигналов, фазовые дрожания и т.д.
В логической структуре интерфейсов указываются возможности и порядок упаковки и передачи данных от различных источников, данных служебного назначения, управления защитными переключениями и т.д.
Электрические интерфейсы Электрические интерфейсы аппаратуры мультисервисных сетей подразделяют:
- интерфейсы PDH (по рекомендациям МСЭ-T G.703, G.704);
- интерфейсы Ethernet ( по стандартам IEEE 802.3);
- интерфейсы управления (по рекомендациям МСЭ-T серии M.3ххх);
- интерфейсы синхронизации (Т1, Т2, Т3, Т4 по рекомендациям МСЭ-T G.703.10, G.811, G.812, G.813, G.783, G.798) и другие.
Примеры характеристик электрических интерфейсов G.703 приведёны в табл.6.1. Эти интерфейсы используются в аппаратуре транспортных сетей в качестве компонентных, т.е. для подключения оборудования коммутационных станций, гибких мультиплексоров, оборудования плезиохронных систем передачи и т.д. Одной из контролируемых характеристик этих интерфейсов является величина дрожания фазы (джиттер), нормативы на которые приведены в табл. 6.2.
К пользовательским интерфейсам аппаратуры транспортных сетей также можно отнести электрические интерфейсы передачи данных сетей Ethernet на скоростях 10, 100 и 1000 Мбит/с, примеры характеристик которых представлены в табл. 6.3. При этом в качестве среды передачи используются витые пары категории 3, 4, 5 и выше.
Нетрудно заметить очень ограниченные длины участков передачи, что свидетельствует о возможности использования этих интерфейсов в основном внутри зданий (в офисах, в линейных аппаратных цехах и т.д.).
При выполнении курсового проекта необходимо выбрать подходящий электрический интерфейс для установки его в оборудование, электрический кабель желательно не ниже категории 5, и кроссовое коммутационное оборудование, через которое будет устанавливаться связь между коммутатором Ethernet и мультисервисной транспортной платформой (МСТП).
В качестве интерфейса синхронизации чаще всего используется электрический интерфейс G.703.10, который аналогичен по своим характеристикам интерфейсу G.703.6, но отличается более высокими требованиями по фазовым дрожаниям в полосе частот 20Гц-100кГц, где допустимое дрожание не должно превышать 0,05ЕИ. При этом для передачи синхронизирующего сигнала 2048 кГц или 2048 кбит/с можно использовать симметричные витые пары и коаксиальные кабели с затуханием на частоте 1024 кГц не более 6дБ на всю длину.
Эти характеристики необходимо учитывать при проектировании сети распределения синхросигналов внутри узла связи, т.е. учесть место оборудования распределения сигналов синхронизации (например, ВЗГ) и длину электрических кабелей, расходящихся к различной синхронизируемой цифровой аппаратуре. Электрические интерфейсы управления чаще всего представлены интерфейсами Ethernet на скорости 10 или 100Мбит/с с разъёмами RJ-45 и консольными интерфейсами RS-232. Эти интерфейсы, соответственно, позволяют подключить систему сетевого управления для всей транспортной сети или локальный терминал управления отдельным сетевым элементом на основе оборудования МСТП. Возможности интерфейсов Ethernet показаны выше. Возможности интерфейса RS-232 состоят в следующем: двухканальный, двунаправленный; длина кабеля не более 15м; скорость передачи 64кбит/с; виды передачи сигналов – последовательно синхронно и асинхронно; используются различные типы разъёмов (от 9 до 25 штырьковых соединений) [18]. Указанные характеристики интерфейсов управления необходимо учитывать при проектировании расположения аппаратуры системы управления и места оператора управления.
Оптические интерфейсы Оптические интерфейсы транспортных сетей характеризуются развивающимся разнообразием. Это обусловлено развитием новых технологий передачи и внедрением новых компонентов: перестраиваемых лазеров; оптических усилителей; компактных компенсаторов дисперсии; процессоров коррекции ошибок FEC и т.д. В качестве стандартов на оптические интерфейсы применяются рекомендации ITU-T и IEEE 802.3. В соответствии с этими стандартами оптические интерфейсы можно разделить на три группы (рис.6.1):
- одноканальные, т.е. обеспечивающие передачу только на одной оптической частоте (G.955, G.957, G.691, G.693, IEEE 802.3 u,z);
- многоканальные, т.е. обеспечивающие передачу на двух и более оптических частотах одновременно (G.692, G.694.1, G.694.2, G.695, G.696.1, G.696.2, G.698.1, G.698.2, G.959.1);
- оптические интерфейсы пассивных оптических сетей (PON), которые поддерживают передачу оптических сигналов на 1, 2, 3 и более оптических частотах (G.983, G.984, G.985, IEEE 802.3ah).
Ниже приводится краткая характеристика указанных оптических интерфейсов и возможностей их применения.
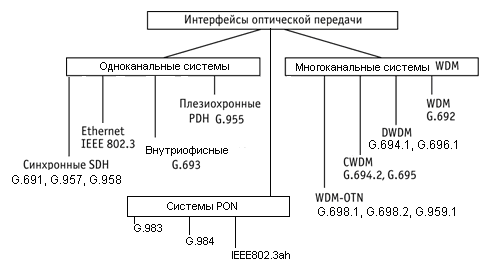
Рис.6.1. Общая классификация оптических интерфейсов
Сеть тактовой синхронизации – определение. Источники и схема ухудшения качества синхронизации. Проблемы стабилизации сетевой синхронизации в цифровых сетях связи. Понятие о проскальзывании. Нормирование проскальзываний. Определение числа проскальзываний по стабильности тактовых генераторов.
Понятие проскальзываний и их нормирование
Любая цифровая система в своей основе требует тактовый задающий генератор, который должен синхронизировать все внутренние и внешние операции по обработке цифровых данных. Применение разных тактовых генераторов может повлечь за собой сбои передачи, если не произвести принудительной синхронизации генератора приемника генератором передатчика. При этом на стабильность частот генераторов на обоих концах линии цифровой передачи будут влиять различные физические факторы, которые вызывают дрожание фазы хронирующих импульсов. Этими факторами являются: шум и помехи, действующие на цепь синхронизации в приемнике; изменение длины пути передачи сигнала обусловлены температурными перепадами, рефракцией в атмосфере и т. д.; изменение скорости распространения сигналов в физической среде (в проводных и беспроводных линиях); нарушение регулярности поступления хронирующей информации; доплеровские сдвиги от подвижных оконечных устройств; переключения в линиях (срабатывание автоматического резервирования); систематические дрожания фазы цифрового сигнала, возникающие в регенераторах (повторителях) и т.
Тактовая сетевая синхронизация представляет собой один из видов синхронизации, необходимой для обеспечения функционирования цифровых систем передачи и коммутации. Тактовая синхронизация это процесс точного временного соответствия между принимаемым сигналом и последовательностью тактовых импульсов. В цифровых системах понятие "синхронизм" тесно связано с понятием "проскальзывания" (slips).
Проскальзывание – исключение или повторение в цифровом сигнале одного или нескольких бит, происходящее вследствие различия в скоростях записи и считывания двоичных данных в буферных устройствах.
Проскальзывание может быть управляемым или неуправляемым. Проскальзывание, которое не приводит к сбою цикловой синхронизации, называют управляемым. При этом сигнал с потерями восстанавливает синхронизм. При неуправляемом проскальзывании моменты потери и повторения позиций в цифровом сигнале невосполнимы.
Количество проскальзываний является предметом нормирования и служит основой определения требований к тактовым генераторам сети синхронизации.
Нормирование проскальзываний введено с рекомендации МСЭ-Т G.822 для стандартного цифрового условного эталонного соединения длиной 27 500 км основного цифрового канала 64 кбит/с между абонентскими окончаниями. Это соединение представляет собой соединение двух национальных сетей через несколько международных транзитов и насчитывает в общей сложности до 13 узлов и станций (из них пять центров международной коммутации и на каждой национальной сети по третичному, вторичному и первичному центру коммутации).
В таком соединении может происходить:
а) не более пяти проскальзываний за 24 часа в течение 98,9% времени работы;
б) более пяти проскальзываний за 24 часа, но менее 30 за один час в течение 1% времени работы;
в) более 30 проскальзываний за один час в течение 0,1% времени работы.
Время работы – не менее одного года. Качество, обозначенное а), соответствует псевдосинхронному режиму сети. Качество, обозначенное б), оценивается как пониженное качество, при котором сохраняется трафик. Качество, обозначенное в), считается неудовлетворительным и соответствует нарушению соединения.
Решение проблем стабилизации тактовой частоты решают с помощью следующих способов:
Применение эластичной памяти, компенсирующей кратковременную нестабильность тактовой частоты в буферных схемах;
Применение высокостабильных генераторов тактовых частот: атомных часов с водородным, цезиевым или рубидиевым стабилизаторами и специально стабилизированных кварцевых генераторов;
Применение иерархической принудительной системы распределения тактового синхронизма;
Грамотное проектирование сети синхронизации с учётом возможностей транспортных систем и систем управления;
Моделирование систем распределения синхронизма;
Регулярное проведение аудита тактовой сетевой синхронизации;
Подготовка высококвалифицированных специалистов.
Источниками тактовых сигналов в цифровых системах и сетях являются тактовые генераторы, которые подразделяются на первичный эталонный (ПЭГ), ведомый/вторичный задающий (ВЗГ), генератор сетевого элемента (ГСЭ).
Число проскальзываний, которые возникают из-за ухудшения качества синхронизации, определяется следующей формулой [22]:
Число проскальзываний за 24 часа =
= (число секунд за сутки) х (число циклов в секунду) х (f / fo), (5.1) где (f / fo) – точность синхронизации.
Если длительность цикла 125 мкс, цикловая частота равна 8 кГц, число секунд в сутках – 86 400, то число проскальзываний определяется:
Nпроск = 6,9 х 10 8 х (f / fo) . (5.2)
Соотношение (5.2) позволяет определить связь норматива на проскальзывания и требуемую точность синхронизации. Таким образом, чем больше разность частот записи и считывания данных в буферной памяти Δf, тем больше частота проскальзываний. При стабильности тактового генератора 2 х 10 – 11 число проскальзываний в сутки составит:
Nпроск = 13,8 ×10 – 3 , т. е., возникнет одно проскальзывание за 72,5 суток, что соответствует требованию рекомендации G.822.
Для выполнения норматива на число проскальзываний не более одного за 70 суток необходимо для двух самостоятельных по синхронизации узлов иметь стабильность генератора 1 х 10 – 11.
Для распределения норм проскальзываний на число узлов N применима формула:
Число проскальзываний=(1 проскальзывание за 70 суток)/(N-1), т. е. для N = 13 одно проскальзывание, при условии самостоятельных тактовых механизмов каждого узла, составит 70/(13-1)=5,8 суток.