

12.Понятие о качестве сау. Точность работы сау в установившемся режиме.
1. Понятие о качестве системы
Устойчивость САУ является необходимым, но недостаточным условием для суждения о работоспособности (пригодности) системы, так как понятие устойчивости рассматривается в отсутствие внешних воздействий.
Для того чтобы полнее описать динамические и статические свойства системы, или, как говорят, оценить качество системы управления, нужно уточнить вопрос о виде и характере изменения внешних воздействий. Решение этого вопроса вызывает определенные трудности, потому что воздействия, приложенные к системе, весьма разнообразны и представляют собой сложные функции времени, точный закон изменения которых заранее трудно предсказать. Однако в большинстве случаев все же оказывается возможным выбрать из множества внешних воздействий такое, которое было бы наиболее типичным или наиболее неблагоприятным для рассматриваемой системы.
В качестве типового
задающего воздействия наиболее часто
фигурирует единичная
ступенчатая функцияv(t)=1(t).
При анализе следящих систем за типовое
воздействие принимают степенную
функцию![]() или гармоническую
функциюv(t)=Asint.
Систему управления антенной радиолокационной
станции исследуют, полагая v(t)=arctgλt.
или гармоническую
функциюv(t)=Asint.
Систему управления антенной радиолокационной
станции исследуют, полагая v(t)=arctgλt.
В системах автоматической стабилизации существенное значение имеет реакция на возмущающее воздействие f(t) (нагрузку). Обычно считают f(t)=f01(t), где f0=const.
Выбрав вид воздействия и, изучив определяемую им реакцию системы, можно составить довольно полное представление о динамических и статических свойствах системы.Таким образом, вид реакции, ее характер и определяют качество системы. Каким бы ни было выбранное типовое воздействие, оно всегда вызовет в системе переходный процесс, после которого система, в случае ее устойчивости, придет в установившееся состояние.В соответствии с двумя указанными стадиями реакции системы на типовые воздействия (переходный процесс и установившееся состояние), естественно разделить показатели качества – некоторые числовые величины, позволяющие составить представление о реакции системы, - на две группы.
Первая группа характеризует поведение системы в установившемся режиме и обычно определяется установившейся ошибкой системы, получаемой спустя большой промежуток времени после приложения воздействия. Эта группа носит название критериев точности.
Вторая группа характеризует поведение системы в переходном процессе, т.е. ее поведение в промежуток времени, непосредственно следующий за моментом приложения выбранного типового воздействия. Эту группу можно, в свою очередь, разделить на:
а) критерии качества, определяющие величину запаса устойчивости, т.е. показывающие, насколько далеко от границы устойчивости находится система
б) критерии качества, определяющие быстродействие системы, под которым понимается быстрота реагирования системы на появление воздействий. Наиболее просто оценивать быстродействие по времени переходного процесса.
2. Точность работы сау в установившемся режиме.
В общем случае на САУ оказывают влияние задающее воздействие v(t), возмущающее воздействие f(t) и шум измерения s(t). При этом изображение по Лапласу у(р) выходной величины y(t) линейной системы может быть записано в виде
y(p)=Ф(p)v(p)+Фf(p)f(p)+Фs(p)s(p), (1)
где Ф(р) – передаточная функция замкнутой системы;
Фf(p) – передаточная функция по возмущению f(p)=L{f(t)};
Фs(p) – передаточная функция по шуму измерения s(p)=L{s(t)};
v(p)=L{v(t)} - изображение по Лапласу задающего воздействия v(t).
Заметим, что для системы с одной степенью свободы (см. рисунок ниже) у(р) можно выразить как
y(p)=T(p)[v(p) - s(p)]+ W1(p)S(p)f(p),
используя передаточную функцию объекта W1(p), функцию чувствительности S(p) и дополнительную функцию чувствительности T(p).

Задачей САУ является обеспечение в любой момент времени равенства величин: y(t)=v(t). Однако реальная система выполняет эту задачу с некоторой ошибкой
εп(t)=v(t) -y(t) (2)
равной разности между заданным v(t) и действительным y(t) значениями управляемой величины. Изображение по Лапласу этой ошибки с учетом (1) равно
εп(р)=v(p)-y(p)= ε(p)+ εf(p)+ εs(p) (3)
где
ε(p)=[1-Ф(p)]v(p); (4)
εf(p)=-Фf(p)f(p); (5)
εs(p)=-Фs(p)s(p). (5,а)
Для системы с одной степенью свободы
ε(p)=T(p)v(p);
εf(p)= -W1(p)S(p)f(p);
εs(p)=-T(p)s(p)
и полная ошибка
εп(р)= S(p)v(p) - W1(p)S(p)f(p)+ T(p)s(p)
зависит от функции чувствительности S(p) и дополнительной функции чувствительности S(p).
Для хорошего воспроизведения v (обычно низкочастотного) требуется
|S(j
)|
было малым
![]() 0
0![]() .
.
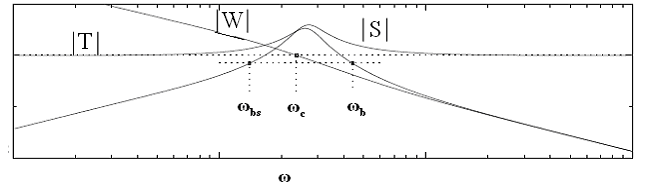
Для снижения влияния шума измерения (шума датчика) s (обычно высокочастотного) требуется
|T(j
)|
было малым
![]() .
.
Т.к. T(p)+
S(p)=1
p,
то мы не можем сделать, чтобы обе T(p)
и S(p)
были малыми
на тех же самых (одинаковых частотах)
(см. рисунок ниже). Величина
![]() определяет наименьшее расстояние от
АФХ разомкнутой системы до критической
точки (-1,j0).
Рекомендуемое
значение лежит между 1.2 и 2.
определяет наименьшее расстояние от
АФХ разомкнутой системы до критической
точки (-1,j0).
Рекомендуемое
значение лежит между 1.2 и 2.
Это обстоятельство является фундаментальным ограничением при проектировании системы.
Таким образом, ошибка системы состоит из трех составляющих
εп(t)= ε(t)+ εf(t)+ εs(t), (6)
первая из которыхε(t)=L-1[ε(p)] называется ошибкой воспроизведения, вторая εf(t)=L-1[εf(p)] - ошибкой по возмущению, а третья εs(t)=L-1[εs(p)] – ошибкой по шуму измерения.
Ошибка воспроизведения показывает, как точно воспроизводит данная система задающее воздействие v(t) в отсутствие других внешних воздействий (f=s=0). Величина этой ошибки определяется инерционностью системы и видом задающего воздействия v(t).
Ошибки по возмущению и шуму измерения соответственно показывают, как влияют на управляемую величину возмущение и шум измерения при задающем воздействии v(t), равном нулю. Такое разделение ошибки на три составляющие возможно лишь в линейных системах, для которых справедлив принцип суперпозиции.
Выражение (6) для устойчивых систем определяет ошибку как в установившемся, так и в переходном режимах. Переходная составляющая ошибки обычно рассматривается при исследовании переходных процессов. Поэтому в данной главе остановимся на рассмотрении ошибки в установившемся режиме, который теоретически наступает при t→∞. Величина установившейся ошибки
(εп)уст(t)= εуст(t)+ (εf)уст(t)+ (εs)уст(t) (7)
характеризует точность работы САР в установившемся режиме.