

9.11. Особливості геометрії косозубих циліндричних передач
Зачеплення
циліндричних прямозубих коліс має низку
недоліків. Це, перш за все, невеликий
коефіцієнт перекриття (для зовнішнього
зачеплення
![]() ).
Внаслідок цього все навантаження,
незалежно від кількості зубців коліс,
розподіляється не більше ніж на дві
пари зубців. Контакт зубців у прямозубих
передачах відбувається по прямих лініях,
паралельних осям обертання коліс,
причому зубці одночасно по всій своїй
ширині входять у зачеплення й одночасно
по всій ширині виходять з нього. Отже,
навантаження (перехід зачеплення) з
зубця на зубець передається миттєво і,
як наслідок, супроводжується ударом і
шумом. Плавність роботи у прямозубих
передач порівняно невелика. Картина
зачеплення у будь-якій площині,
перпендикулярній до осі обертання
коліс, повністю однакова за геометрією
та часом. Якщо при виготовленні зубчастих
коліс, як це завжди має місце, були
допущені якісь похибки (наприклад,
неточність профілю, несталість кроку
та ін.), то умови роботи передачі істотно
погіршуються.
).
Внаслідок цього все навантаження,
незалежно від кількості зубців коліс,
розподіляється не більше ніж на дві
пари зубців. Контакт зубців у прямозубих
передачах відбувається по прямих лініях,
паралельних осям обертання коліс,
причому зубці одночасно по всій своїй
ширині входять у зачеплення й одночасно
по всій ширині виходять з нього. Отже,
навантаження (перехід зачеплення) з
зубця на зубець передається миттєво і,
як наслідок, супроводжується ударом і
шумом. Плавність роботи у прямозубих
передач порівняно невелика. Картина
зачеплення у будь-якій площині,
перпендикулярній до осі обертання
коліс, повністю однакова за геометрією
та часом. Якщо при виготовленні зубчастих
коліс, як це завжди має місце, були
допущені якісь похибки (наприклад,
неточність профілю, несталість кроку
та ін.), то умови роботи передачі істотно
погіршуються.
Особливістю геометрії косозубих зубчастих коліс є, перш за все те, що зубці розташовані на циліндрах обох коліс по гвинтових лініях. Якщо ці циліндри розгорнути на площині, то косі зубці (у розгортці) виявляться розміщеними на похилих паралельних прямих (рис. 9.14).
У площинах, перпендикулярних до осі колеса, зачеплення відбувається так само, як і у прямозубих зубчастих колесах, але у кожній з площин у зачепленні задіяні різні точки профілю. Зачеплення у всіх перетинах відбувається не синхронно у часі. Контакт пари зубців починається з точки на одному з торців коліс, плавно в міру їх повороту переходить у лінію, що розповсюджується на всю товщину зубця, а потім, так само плавно, зменшується до точки на протилежному торці та зникає. Отже, зубці поступово входять і поступово виходять із зачеплення. Все це сприяє більшій плавності, швидкохідності, безшумності, навантажувальній здатності, меншій чутливості зубців до похибок монтажу і виготовлення.
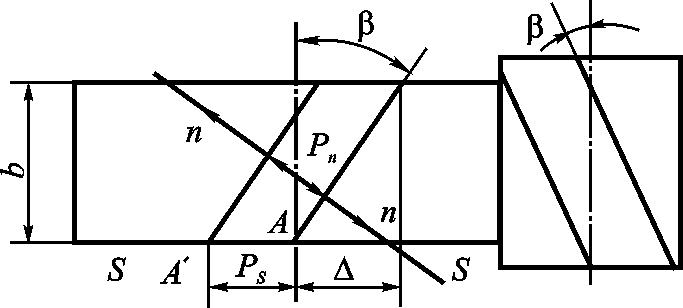
Рис. 9.14
У косозубій передачі
зубці розташовані під деяким кутом
до твірної циліндра зубчатих коліс і з
торцем колеса створюють непрямий кут.
Два спряжені колеса повинні мати рівні
кути нахилу зубців. При зовнішньому
зачепленні гвинтова лінія нахилу зубця
на одному колесі повинна бути правою,
а на іншому лівою (![]() ).
).
У передачі розрізняють
два кроки:
![]() –
торцевий,
–
торцевий,
![]() –
нормальний і, відповідно, два модулі
–
нормальний і, відповідно, два модулі
![]()
![]() ,
,
![]() ,
,
між ними існує
очевидний зв’язок
![]()
Стандартним модулем є нормальний модуль, оскільки нарізання зубців косозубих коліс може бути виконано стандартним рейковим інструментом, встановленим під кутом до осі заготовки.
Формулу для визначення коефіцієнта перекриття косозубого зачеплення, згідно з рис. 9.14, можна подати у вигляді
![]() .
.
Отже, коефіцієнт
перекриття більший на величину
![]() ,
ніж коефіцієнт перекриття у прямозубого
зачеплення. Таким чином, збільшуючи кут
нахилу гвинтової лінії
та ширину колеса, можна підвищити
коефіцієнт перекриття.
,
ніж коефіцієнт перекриття у прямозубого
зачеплення. Таким чином, збільшуючи кут
нахилу гвинтової лінії
та ширину колеса, можна підвищити
коефіцієнт перекриття.
На практиці трапляються косозубі передачі з коефіцієнтом перекриття порядку восьми, десяти. Отже, у косозубих колесах одночасно у зачепленні може знаходитися 8 – 10 пар зубців (а не одна чи дві пари, як у прямозубих). Це збільшує плавність роботи передач, навантажувальну здатність. Косозубі колеса широко застосовуються для передач, що працюють при високих швидкостях та передають великі потужності.
Однією з переваг
косозубого зачеплення є також можливість
проектування меншої за габаритами
передачі. Так, мінімальне число зубців
шестерні за умови не підрізування їх
інструментальною рейкою є
![]()
![]() Якщо кут
Якщо кут
![]()
![]() то
то
![]() що значно менше, ніж для прямозубої
передачі.
що значно менше, ніж для прямозубої
передачі.
Поряд із перевагами
косозубі колеса мають істотний недолік.
Оскільки в таких колесах нормальна
реакція зубців спрямована похило до
осі колеса, то виникає осьове зусилля.
При збільшенні кута
осьова складова зусилля зростає, тому
в більшості передач кут
не перевищує
![]() (частіше
(частіше
![]() ).
).
Наявність осьового
зусилля ускладнює конструкцію передачі.
Для його сприймання треба встановлювати
упорні підшипники. Це призводить до
додаткових втрат на тертя. Для усунення
вказаного недоліку застосовують шевронні
колеса. Шевронне зубчасте колесо
складається ніби з двох косозубих коліс,
суміщених торцями так, щоб зубці мали
протилежний нахил (рис. 9.16).
У таких колесах осьові зусилля взаємно
зрівноважуються. Це дозволяє збільшити
кут
до
![]() ,
що підвищує плавність роботи передачі.
Шевронні колеса застосовують у потужних
швидкохідних закритих передачах.
Необхідно відмітити, що виготовлення
шевронних коліс є значно складнішим та
дорожчим.
,
що підвищує плавність роботи передачі.
Шевронні колеса застосовують у потужних
швидкохідних закритих передачах.
Необхідно відмітити, що виготовлення
шевронних коліс є значно складнішим та
дорожчим.