

2) Время перезагрузки системы.
Этот параметр важен для систем, где требуется дополнительная работа, т.е. нужны средства, которые автоматически перезапускают систему при зависании.
5. Ядро операционной системы реального времени. Функции ядра.
Ядро ОСРВ – отвечает за базовые функции (планирование задач, синхронизация, управление памятью).
ОС – имеет файловую систему, сетевую поддержку, связь оператора.
(Ядро внутри, ОС снаружи)
1) Синхронизация ресурсов – методы ограничения доступа к общим ресурсам.
2) Межзадачный обмен – отвечает за передачу данных между программами внутри одной и той же системы. Отвечает за взаимодействие между системами через сеть.
3) Функция разделения данных – отвечает за доступ к общим разделам памяти и организацию очереди данных.
4) Обработка запросов внешних устройств – ядро отвечает за обеспечение службы вв/выв, позволяющих прикладным программам осуществлять чтение с устройств и записывать на них.
5) Обработка особых ситуаций – событий, возникающих во время выполнения программы. Возможность обработки такого рода событий позволяет прикладным программам предсказуемо реагировать на внешние события.
6. Архитектуры осрв: монолитные ос.
Монолитная архитектура – это ОС с набором модулей, взаимодействующих между собой внутри ядра системы и предоставляющих прикладным программам входные интерфейсы для подключения аппаратуры.
Монолитная архитектура представляет собой:
Интерфейс между приложениями и ядром (API);
Ядро системы;
Интерфейс между ядром и оборудованием (драйверы устройств).

+: Монолитная архитектура более быстрая по сравнению с другими.
–: 1) Время работы системных вызовов довольно большое. Оно переключает уровень привилегий от пользовательской задачи к ядру.
2) Ядро не может быть прервано пользовательской задачей, т.е. высокоприоритетная задача не может получить управление из-за низкоприоритетной работы.
3) Сложность переноса ОС на новые архитектуры процесса.
4) Негибкость, т.е. сложно изменить часть ядра.
5) Плохая предсказуемость поведения, т.е. довольно сложно взаимодействуют модули.
7. Архитектуры осрв: уровневые ос.
+: 1) Прикладные приложения могут получать доступ к аппаратуре не только через ядро, но и на прямую.
2) Имеет большую степень предсказуемости по сравнению с монолитной архитектурой.
3) Обеспечивает быстрый допуск к аппаратуре.
-: Отсутствие многозадачности.

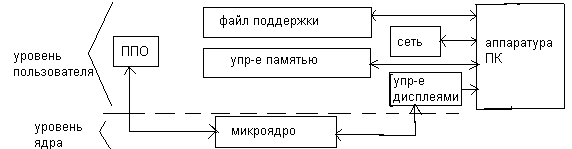
8. Архитектуры ОСРВ: клиент – сервер. (на основе микроядра)
Все системные сервисы вынесены на уровень пользователя, а микроядро выполняет ф-ю диспетчера сообщений между пользовательскими программами и серверами.
+: 1) Повышенная надежность;
2) Масштабируемость;
3) Повышенная отказоустойчивость.
-: Нельзя переключить задачи во время работы микроядра.
Примеры: OS-9, QNX.
9. Архитектуры осрв: объектно – ориентированные.
Сервис IP отсутствует.
Взаимодействие между пользователями системы осущ-ся с помощью вызова функций.
+: 1) Переключение задач возможно в любое время.
2) Легкость модернизации;
3) Повторное использование кода;
4) Роль IP играет компилятор и редактор обратной связи. При старте редактор загружает нужные ему микроядра (т.е. загружаются только те, которые нужны, т.о. уменьшается объем используемой памяти).
