

Вопрос 1 Запишите последовательность определения входного тока цепи с двумя параллельно соединенными ветвями (rl-ветвь и с-ветвь) при их подключении к источнику синусоидального напряжения.
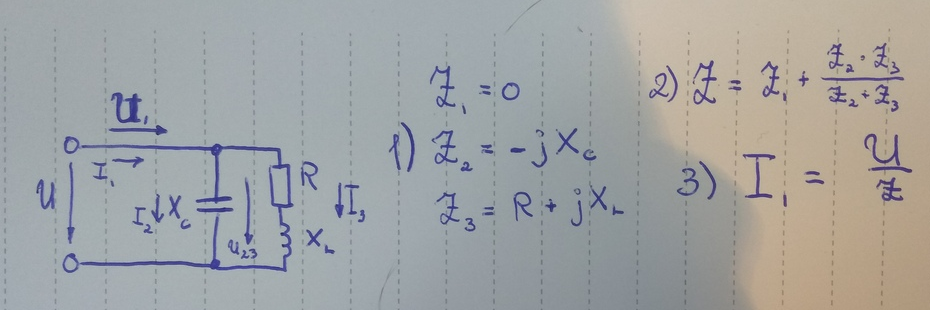
1) Определяем полные сопротивления на участках цепи
2) Находим полное входное сопротивление цепи
3) Находим входной ток цепи
ВОПРОС 2 Изобразите на одном рисунке (для сравнительной оценки) механические характеристики 3-х фазного синхронного и 3-х фазного асинхронного с КЗ-ротором двигателей, а также двигателя постоянного тока параллельного возбуждения, и объясните, почему таким образом изменяется частота вращения их валов при изменении момента на валу от нуля до, например, 5МНомин.
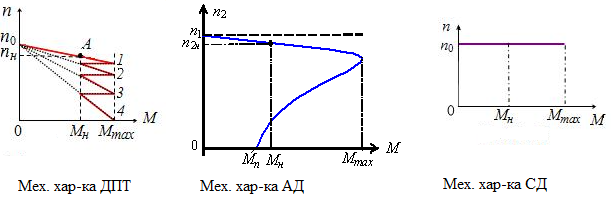
У ДПТ при моменте Ммах при пусковом токе якорь может перегреться, поэтому его включают сначала с максимальным сопротивлением, затем, переключая передачи, выводят на нормальный режим работы.
У АД при Ммах двигатель не выйдет на нормальный режим работы по причине того, что не рассчитан на такую работу (ДА, ДРУГОГО Я НЕ ПРИДУМАЛ ТУТ)
У СД при Ммах момент частота вращения сохранится, т.к. зависит она от момента сопротивления, который определяется потребляемым током и мощностью из сети, но при подключении особо больших нагрузок (увеличении момента сопротивления) может нарушиться синхронизм работы и двигатель выйдет из строя.
Билет №11
Вопрос 1 Резистивный элемент (r) в цепи синусоидального тока. Активное сопротивление, активная мощность. Графики мгновенных значений тока, напряжения и мощности. Векторная диаграмма тока и напряжения.
Резистивный
элемент в цепи синусоидального тока –
активное сопротивление, подключенное
к цепи синусоидального тока (резистор).
Если к источнику переменного напряжения
![]() подключить
активные сопротивления R, то
через него будет проходить ток
подключить
активные сопротивления R, то
через него будет проходить ток![]() ,
где
,
где ![]() и
и ![]()
В
цепи с активным сопротивлением ток и
напряжение совпадают по фазе, поэтому ![]()
Активное сопротивление R – это действительная часть комплексного сопротивления Z = R + jX. Активная мощность - среднее значение общей мощности р(t) за период T. P = UIcosφ = RI2
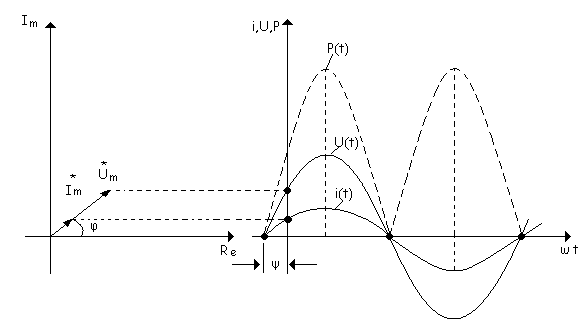
Графики мгновенных значений тока, напряжения и мощности на резисторе. Векторные диаграммы тока и напряжения.
Вопрос 2 Устройство, принцип действия и характеристики трёхфазного синхронного двигателя.
Синхронные машины - это машины переменного тока, у которых частота вращения ротора равна частоте вращения магнитного поля, создаваемого магнитодвижущей силой обмотки статора. Синхронные машины, как и все электрические машины, обратимы, т. е. они могут работать как в режиме генератора, так и в режиме двигателя.
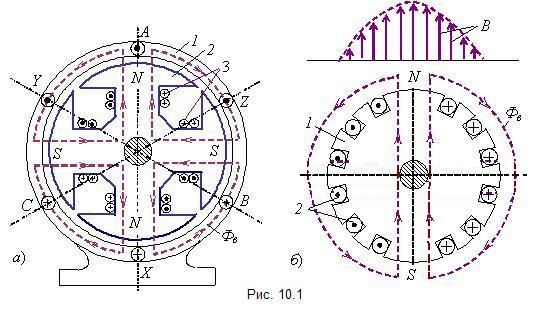
Частота напряжения (тока), вырабатываемого синхронными генераторами, f1 = pn2/60, где n2 - частота вращения ротора; p - число пар полюсов магнитного поля статора. Гидрогенераторы обычно имеют явнополюсное исполнение ротора (частота вращения n2 ≤ 1500 об/мин, соответственно число пар полюсов p ≥ 2 при f1 = 50 Гц) (рис. 10.1, а), а турбогенераторы - неявнополюсное (n2 = 3000 об/мин. при p = 1 и f1 = 50 Гц)) (рис. 10.1, б). Синхронные генераторы - самые мощные электрические машины. Единичная мощность гидрогенераторов, устанавливаемых на гидростанциях, достигла 640 МВт, а турбогенераторов, устанавливаемых на тепловых электростанциях - 800…1200 МВт; диапазон напряжений от 230 В до 36,75 кВ.
Синхронные двигатели широко применяют, как правило, в электроприводах механизмов большой мощности (большие компрессоры, насосы, воздуходувки, угольные мельницы и т. д.) с нерегулируемой частотой вращения. Синхронные двигатели выпускаются в диапазоне мощностей от 132 до 30000 кВт с частотой вращения от 250 до 3000 об/мин на напряжение 6 и 10 кВ, 50 Гц. Частота вращения ротора равна частоте вращения магнитного поля статора:
|
||||
|
|
|
|||
Синхронная машина,
принципиальная схема устройства которой
приведена на рис. 10.1, а,
состоит из статора (якоря) 1 и ротора
(индуктора) 2. 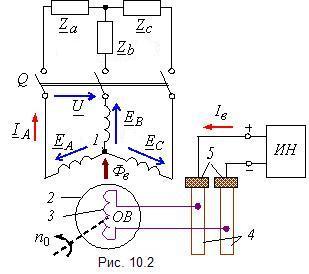
Статор синхронной машины принципиально устроен так же, как и статор асинхронной машины. В пазах статора размещается многофазная (обычно трёхфазная) обмотка 1 (рис. 10.2). Фазы обмотки, как правило, соединяют в звезду. Магнитодвижущие силы фазных обмоток статора создают вращающееся магнитное поле Фв машины.
Явнополюсный ротор (рис. 10.1, а) представляет собой электромагнит 2, обмотка 3 которого питается постоянным током через два контактных кольца 4 и щетки 5 от постороннего источника напряжения ИН и называется обмоткой возбуждения (ОВ) (рис. 10.2). Ток Iв создаёт магнитный поток возбуждения Фв. В качестве источника постоянного напряжения ИН (возбудителя) используют генератор постоянного тока, располагаемый на одном валу с ротором синхронной машины, или вентильный выпрямитель с щёточной или безщёточной системой возбуждения.
Неявнополюсный ротор (рис. 10.1, б) состоит из сердечника 1, изготавливаемого из углеродистой или легированной стали, и обмотки возбуждения 2, распределённой по нескольким пазам ротора таким образом, чтобы получить синусоидальную по форме магнитную индукцию В в зазоре машины.
При включении обмоток 1 якоря (рис. 10.12, a) в трехфазную сеть токи статорной обмотки, смещенные по фазе на угол, создают вращающееся с частотой n1 = 60f1/p магнитное поле Фя. Однако ротор с магнитным потоком Фв, созданным постоянным током Iв обмотки возбуждения 2, будет неподвижным, так как быстровращающееся магнитное поле Фя действует на ротор со знакопеременной силой, не создающей среднего момента, т. е. пусковой момент синхронного двигателя Мп = 0.
|
|
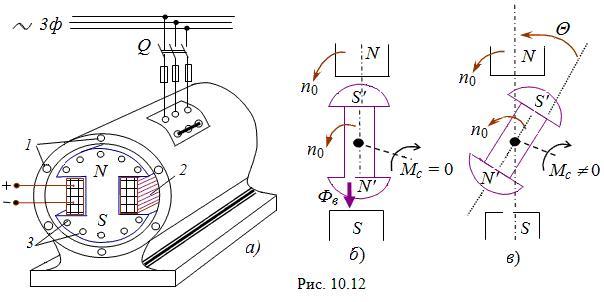
Но если предварительно разогнать ротор до частоты вращения n2, близкой к синхронной n1, то возникающий электромагнитный момент, как результат взаимодействия (притяжения) разноименных полюсов магнитных полей якоря и ротора, (см. рис. 10.12, б) заставит следовать ротор за магнитным полем статора, как говорят, втянуться в синхронизм .
Для разгона современных синхронных двигателей (СД) в их ротор встраивают пусковую короткозамкнутую обмотку 3 (см. рис. 10.12, а), подобную беличьей клетке асинхронных двигателей. Стержни этой обмотки укладывают в специальные пазы полюсов и соединяют по торцам ротора.
Билет 12