

5.5 Построение противодействующей характеристики
Построим противодействующую характеристику Fп=F(δ), которая определяется в совокупности силой возвратной пружины и весом подвижных частей, силами пружин главных контактов, силами пружин размыкаемых блок - контактов и силами пружин замыкаемых блок - контактов. В момент касания главных контактов сила нажатия возрастает скачком за счет предварительного натяжения пружин, благодаря чему уменьшается вибрация контактов и возможность их сваривания в процессе включения цепи. То же самое относится и к вспомогательным контактам, коммутирующим цепь управления.
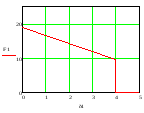
Рис. 5 – Противодействующая характеристика контактной пружины главных контактов
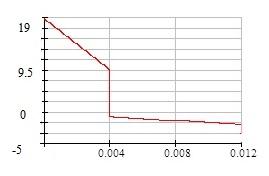
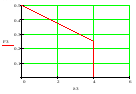
Рис. 6 – Суммарная характеристика и противодействующая характеристика блок-контактов
Глава 6.Кинематический расчет. Построение механической характеристики.
Большое количество типов коммутационных аппаратов с электромагнитным приводом (ЭМА), их отличие по роду и величине тока, числу и виду коммутирующих контактов, по условиям эксплуатации определяет использование различных кинематических схем при проектировании. Правильный выбор кинематической схемы во многом определяет высокую надежность, малые габариты и стоимость, простоту обслуживания, возможность создания различных исполнений и другие важнейшие показатели и характеристики ЭМА.
При построении механических характеристик учитываются следующие составляющие механических усилий.
1.Силы
полезных сопротивлений – силы нажатия
главных и блокировочных контактов,
осуществляемые пружинами
 .
.
2.Силы
тяжести подвижных частей: левой и правой
относительно главной оси вращения

3.Сила возвратной пружины - Рвп.
4. Сила реакции в упоре - Руп.
Основные формулы для расчета:
 - начальный зазор.
(6.1.)
- начальный зазор.
(6.1.)
Исходные данные :
раствор главных контактов – 4 мм; раствор блок контактов – 4 мм;
провал главных контактов –2.5 мм провал блок контактов – 2 мм;
отношение плеч усилия гл. контактов и электромагнитной силы –1;
отношение плеч усилия блок контактов и электромагнитной силы – 2;
отношение плеч деталей схемы – 1;
отношение плеч усилия возвратной пружины и электромагнитной силы – 1;
отношение плеч усилия упора и электромагнитной силы – 0.92;
отношение плеча веса правой части к плечу электромагнитной силы – 0.69;
отношение плеча веса левой части к плечу электромагнитной силы – 0.84;
конечное нажатие гл. контактов – 1 Н;
конечное нажатие блок контактов – 0.25 Н;
вес правой части подвижной системы – 0.5 Н;
вес левой части подвижной системы – 0.5 Н;
число главных замыкающих контактов – 3;
число блокировочных замыкающих контактов – 2.

Рис.7. Расчет механической характеристики.
Рис.8. Механическая характеристика.
Глава 7. Проектирование электромагнита переменного тока
Конструкция электромагнита может быть принята на основе обзора и анализа аналогичных конструкций, выпускаемых промышленностью. Для привода контактов мостикового типа необходим электромагнит с поступательным движением якоря. Выбираем Ш – образную конструкцию магнитопровода. Эскиз электромагнита приведен на рис.3.1.

Рис.7. Эскиз электромагнита