

-
Оценивание параметров модели выбранной структуры.
Для оценивания параметров статических моделей и проверки их адекватности наибольшее распространение получили 2 метода:
1) регрессионный анализ;
2) корреляционный анализ.
Оба этих метода включают как задачу параметрического оценивания, связанную с нахождением значений коэффициентов модели выбранной структуры, так и определение соответствий этих моделей и экспериментальных данных. В качестве процедуры параметрического оценивания оба этих метода используют МНК. Но проверка соответствий модельных и экспериментальных данных в этих методах осуществляется различно. Эти различия вызваны тем, что области их применения различны. Это очень важно, т. к. во многих публикациях, в том числе и в учебной литературе, практически не объясняются различия между этими двумя способами. Их часто не различают, иногда называя корреляционно-регрессионным анализом, что методически неверно.
Эти 2 метода следует различать по области их применения. Регрессионный анализ рекомендуется использовать для отображения причинно-следственных связей, а корреляционный для равнозначных в смысле причинно-следственных связей воздействий.
у1
 1
1








у2
 2
2
Рис. 11
О.И.
 (22)
(22)
 (23)
(23)
(22) и (23) – зависимости, отражающие причинно-следственные связи объекта – оригинала.
Мы можем записать след. образом
у1 = φ1 (у2) (24)
у2 = φ2 (у1) (25)
В
свою очередь зависимости (24)
и (25)
отражают взаимосвязь между одинаковыми
в смысле причинно-следственных связей
воздействиями
 .
Эта связь в реальном объекте не является
причинно-следственной; ее называют
косвенной, опосредованной, т.к. она
обусловлена одновременным влиянием
входных воздействий
.
Эта связь в реальном объекте не является
причинно-следственной; ее называют
косвенной, опосредованной, т.к. она
обусловлена одновременным влиянием
входных воздействий
 на выходные воздействия
на выходные воздействия
 .
Причем эта связь не является однонаправленной
и можно находить зависимости, как в виде
(24),
так и (25),
так как здесь нет ни причин ни следствий.
В то время как зависимость
.
Причем эта связь не является однонаправленной
и можно находить зависимости, как в виде
(24),
так и (25),
так как здесь нет ни причин ни следствий.
В то время как зависимость
 не имеет физического смысла. Практически
зависимость вида (24)
и (25)
могут применяться при косвенных
измерениях, когда один из факторов,
например,
не имеет физического смысла. Практически
зависимость вида (24)
и (25)
могут применяться при косвенных
измерениях, когда один из факторов,
например,
 доступен для измерения с высокой
точностью, а
доступен для измерения с высокой
точностью, а
 измерить
сложно или с большими затратами. В этом
случае ставят эксперимент, оценивают
зависимость вида (24)
и расчетным путем зная,
измерить
сложно или с большими затратами. В этом
случае ставят эксперимент, оценивают
зависимость вида (24)
и расчетным путем зная,
 ,
оценивают
,
оценивают
 .
Такой способ называется косвенным
измерением.
.
Такой способ называется косвенным
измерением.
Сущность метода наименьших квадратов.
Это вычислительная процедура, используемая как в регрессионном, так и в корреляционном анализах, для определения значений коэффициентов заданной структуры модели. При этом структура модели должна быть линейно – параметрической.
Линейная зависимость – это такая зависимость, которая удовлетворяет принципу суперпозиции, которой можно применительно к модели объекта сформулировать следующим образом: принцип суперпозиции выполняется, если реакция модели объекта на суммарное входное воздействие (переменных) равна сумме реакций модели на отдельные составляющие этого входного воздействия.

у
М. О.


Рис.12
у
= φ { }
}
 =
=
 1
+
1
+
 2;
у1
= φ {
2;
у1
= φ { 1};
у2
= φ {
1};
у2
= φ { 2}.
2}.
φ
( )
= φ{
)
= φ{ 1}
+ φ{
1}
+ φ{ 2}
2}
у
= ао
+ а1 (26)
(26)
Выражение
(26)
– является линейной зависимостью не
только по отношению к переменной
 ,
но и к параметрам а1
и ао.
,
но и к параметрам а1
и ао.
Зависимость, которая является линейной по отношению к параметрам, называют линейно – параметрической.
εх:
у = ао
+ а1 + а2
+ а2
 ² (27)
² (27)
Функция
(27)
является нелинейной к ,
но линейной к параметрам а0,
а1,
а2.
,
но линейной к параметрам а0,
а1,
а2.
В общем виде линейно – параметрическим является степнной полином:

К
зависимостям другой структуры, например:
у =Аsin B (28);
(28);
 (29)
метод
наименьших квадратов не применим.
(29)
метод
наименьших квадратов не применим.
Для того чтобы найти значения коэффициентов для таких структур используется 2 способа.
1. Найти соответствующее преобразование с тем, чтобы привести её к линейно – параметрическому виду и затем использовать МНК.
2. Использовать другие методы определения параметров модели, если такое преобразование не находится. В частности можно использовать поисковые процедуры оптимизации. Либо разложить в ряд Тейлора и ограничиться конечным числом его составляющих.
При этом в первом случае мы используем результаты аналитического решения для определения параметров, а во втором – приближенный метод решения.
С помощью МНК находят наилучшие оптимальные оценки параметров линейно – параметрической структуры в смысле среднеквадратичного критерия близости расчетных и экспериментальных данных. Другими словами, МНК есть результат решения оптимизационной задачи, когда модель имеет линейно – параметрическую структуру, а среднеквадратичный критерий представлен в виде:
 (30)
(30)
В
выражение (30)
вместо
 записывается в общем виде линейно-
параметрическая структура модели (для
простоты ограничимся полиномом
записывается в общем виде линейно-
параметрическая структура модели (для
простоты ограничимся полиномом
 порядка).
порядка).
 (31)
(31)
Для
того, чтобы решить ур. (31) для параметров
 и
и
 ,
необходимо взять производные от
остаточной дисперсии по параметрам
,
необходимо взять производные от
остаточной дисперсии по параметрам
 и
и
 и приравнять их к 0. Получим следующую
систему уравнений.
и приравнять их к 0. Получим следующую
систему уравнений.

Такой
вывод справедлив, если выполняются все
предпосылки МНК. Перечислим их: 1) критерий
точности модели является среднеквадратическим;
2) структура модели должна быть линейно
параметрической, т.е. линейной относительно
ее параметров; 3) учитываемые факторы
(входные переменные) должны быть
независимы друг от друга, т.е. корреляционный
момент между ними должен быть равен 0;
4) входные переменные должны измеряться
без ошибок и должны быть управляемыми,
т.е. принимать любые значения, установленные
исследователем; 5) выходная зависимая
переменная может иметь ошибку реализации
и эта ошибка должна быть хорошо описанной
нормальным законом распределения
вероятности; 6) эффекты влияния прочих
(неучитываемых) моделью факторов; так
же можно представить в виде случайной
величины с нормальным законом распределения
вероятности; 7) учитываемые факторы и
эффект неучитываемых факторов должны
быть независимыми, т.е.
 ,
где
,
где
 - входные переменные;
- входные переменные;
 эффект
влияния прочих факторов.
эффект
влияния прочих факторов.
Нарушение этих условий будет приводить к уменьшению эффективности модели к увеличению ошибки модели. Не все эти отмеченные условия одинаково влияют на точность модели. Наиболее сильные нарушения (часто выражающиеся на практике связаны с 7 предположением), когда используются данные при построении модели объекта управления.
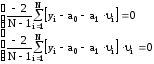
Суть МНК можно пояснить на графике:
υi
υ
Рис.13
С помощью МНК находят такие значения коэффициентов, при которых зависимость выбранной структуры (её кривая) так располагается среди поля экспериментальных точек, что сумма среднеквадратичных отклонений δyi² является минимальной, и при любом другом положении этой кривой среднеквадратичное значение ошибки будет возрастать.
Одним из видов математической модели, применяемых в инженерной практике моделирования, является пересчетная математическая модель. Она используется в так называемых натурно – модельных блоках, которые представляют собой композицию натурных и математических составляющих.
Натурно – модельный блок представляет собой натурно – математическую модель оригинала, например, действующего объекта или системы управления в целом. При этом натурная часть представлена в виде информационного отображения оригинала. Под информационным отображением натурного объекта и системы управления будем понимать совокупность взаимосвязанных между собой и упорядоченных во времени реализаций входных, выходных воздействий и переменных состояния, зафиксированных в действующей системе контроля.
Пример:





И. О.
(О.У.)






У. С.



Рис.14
Если
исследуемый объект является частью
системы управления (объектом управления),
то его входные воздействия V
представляются состоящими
из двух
принципиально различных классов выходных
воздействий
 В свою очередь
В свою очередь

U(t) – управляющие воздействия, вырабатываемые в управляющей системе У.С. с целью реализации заданной траектории Y*(t).
W (t)
– контролируемые внешние воздействия,
которые отражают известное взаимодействие
объекта с окружающей средой.
(t)
– контролируемые внешние воздействия,
которые отражают известное взаимодействие
объекта с окружающей средой.
Y(t) – выходные воздействия объекта и системы управления. Они характеризуют реакцию объекта на изменение входных (управляющих (U(t)) и внешних (контролируемых (Wк(t)) и неконтролируемых (Wн(t))) воздействий.
Будем считать, что результаты функционирования действующей системы контроля этого объекта представлены в графической форме:
Wк(t)

t
U(t)
Y
Y(t)
t
Рис.15
W (t), t Є [t0;
t1]
– реализация W(t) на интервале времени
[t0;
t1].
(t), t Є [t0;
t1]
– реализация W(t) на интервале времени
[t0;
t1].
W (t), U(t), Y(t)
при t Є [t0;
t1]
– информационное отображение объекта
на интервале времени [t0;
t1].
(t), U(t), Y(t)
при t Є [t0;
t1]
– информационное отображение объекта
на интервале времени [t0;
t1].
Соединение натурных и математических составляющих натурно – модельных блоков осуществляется с помощью специального типа математических моделей, которые называются пересчетными математическими моделями. Рассмотрим структуру такой модели:


Vн(t)
Yн(t)
+
-
δV(t)
φ {·}


δу(t)



Yм(t)

+
Vм(t)
+
пересчетная математическая модель
алгоритм
расчета

Рис.16
То, что изображено на схеме запишем в общем виде:
Yм (t) = Yн (t) + δy (t)
δy
(t) = φ {δV (t)}
{δV (t)}
δV (t) = Vм (t) - Vн (t)
Vн (t) и Yн (t) – измеренные значения натурных входных и выходных воздействий, полученных с помощью действующей системы контроля. Они и составляют информационное отображение объекта.
В
пересчетной модели φ {·}
– есть оператор в приращениях. Представляет
собой математическую модель, которая
связывает приращения (отклонение,
вариации) входных воздействий с
приращениями выходных воздействий. И
этот оператор «работает» и соответственно
является работоспособным в небольшом
диапазоне отклонений входных и выходных
воздействий, и поэтому по своей структуре
он существенно проще, чем соответствующие
операторы математической модели,
адекватные в большем диапазоне изменения
этих воздействий.
{·}
– есть оператор в приращениях. Представляет
собой математическую модель, которая
связывает приращения (отклонение,
вариации) входных воздействий с
приращениями выходных воздействий. И
этот оператор «работает» и соответственно
является работоспособным в небольшом
диапазоне отклонений входных и выходных
воздействий, и поэтому по своей структуре
он существенно проще, чем соответствующие
операторы математической модели,
адекватные в большем диапазоне изменения
этих воздействий.
Таким образом, пересчетная модель отвечает на вопрос: «Что было бы на выходе объекта – оригинала, если бы при прочих равных условиях функционирования его входные воздействия изменились бы в некотором небольшом диапазоне?».
Достоинства пересчетных моделей.
1. Оператор по каналам преобразования отклонений входных воздействий в отклонения выходных по своей структуре является более простым.
2. Для отображения свойств и условий функционирования объекта – оригинала нет необходимости строить математические модели изменения внешних контролируемых воздействий, отображающих взаимодействие объекта с окружающей средой.
3. Выходные воздействия Yн (t) содержат в себе не только эффекты изменений контролируемых, но и эффекты неконтролируемых воздействий
4. Нет необходимости также строить модели измерительных и исполнительных блоков, т. к. ошибки измерения и исполнения команд управления непосредственно содержатся в информационном отображении объекта.