

10. Датчики величины усилия
Данную группу составляют датчики, использующие следующие зависимости:
-
Изменение сопротивления от величины усилия.
 ;
;
-
Изменение индуктивности от величины усилия.
Lx
= f( )
;
)
;
3. Изменение емкости от величины усилия.
Cx
= f( )
;
)
;
4. Изменение э. д. с. от величины усилия.
Ex
= f( )
;
)
;
Датчики с изменяющимся активным сопротивлением
Простейшим датчиком усилий с изменяющимся сопротивлением может служить проволока, растягиваемая силами Рх (рис.17,а). Так как сопротивление проволоки равно:
|
или
то
Чувствительность датчика определяется как
где
l – длина, см; q – площадь сечения проволоки, см2,
|
 ;
; ,
, .
. ,
, -
удельное сопротивление проволоки
датчика;
-
удельное сопротивление проволоки
датчика; -
коэффициент Пуассона.
-
коэффициент Пуассона.
Рис.17
Сила Рх связана с удлинением проволоки по закону Гука:
 ;
;
где Е – модуль упругости материала проволоки датчика, кГ/см2.
Обычно чувствительность датчиков лежит в пределах S = 2-5 (до 12).
Проволочные датчики широко используются в качестве тензометров, т.е. измерителей напряжений и удлинений в различных частях конструкций. Проволочный датчик-тензометр представляет собой ряд петель (от 2 до 40) длиной 5-25 мм, реже до 100 мм, шириной 0,8-10 мм, из проволоки с d = 0,002 – 0,05 мм, который наклеивается на бумажную подкладку, а сверху заклеивается защитной бумажной полоской (рис.17,б). Проволочный датчик-тензометр наклеивается на тщательно защищенную часть конструкции при помощи клея (целлюлозного, бакелитового, карбинольного, резинового, воскового) или какого-либо цементирующего состава. Проволочные датчики обладают малой инерционностью и не имеют гистерезиса. Включение датчиков обычно производится по схеме моста или потенциометра (рис.18)
Рис.18
Наряду с проволочными датчиками широкое распространение имеют датчики из полупроводниковых материалов. В качестве последних применяются искусственные составы («тензолиты»):
-
Графит + тонкий кварцевый песок и смола.
-
Графит + мел + шеллак (или канифоль).
-
Уголь (или сажа) + бакелитовый лак.
Датчики изготавливаются обычно или в виде полосок (длиной l = 40-60 мм, шириной b = 4-6 мм, толщиной h = 1-30 мм), или в виде нитей (d = 1-2 мм), или в виде слоя на изолирующей подкладке. Датчики из тензолитов обладают большей чувствительностью (до S = 300), но часто имеют нестабильные характеристики, малую механическую прочность и большой гистерезис.
Датчики с изменяющей и взаимной индуктивностью.
Изменение магнитной
проницаемости ферромагнитных материалов
при наличии в них механических напряжений
может быть использовано для датчиков,
у которых
 .
.
Величина относительного изменения магнитной проницаемости является функцией следующих параметров:
 ,
,
а значение чувствительности датчика по отношению к механическим напряжениям рх
 ,
,
где Н – величина напряженности намагничивающего поля;
 -
изменение температуры датчика.
-
изменение температуры датчика.
Максимальная
чувствительность датчика
 макс будет иметь место при Н=Нопт,
которая соответствует
макс будет иметь место при Н=Нопт,
которая соответствует
 макс.
макс.
В качестве материала магнитоупругих датчиков обычно применяют никелево-железные сплавы. Зависимость относительного изменения магнитной проницаемости от величины механических напряжений

в области упругих деформаций и малого относительного удлинения для отожженного пермаллоя (78,5% Nі) приведена на рис.19. В качестве материала для датчика можно рекомендовать также сплав 65% Nі и35% Fе. Часто датчики-тензометры предварительно тренируют путем многократных деформаций. На рис.19,б показано устройство двух типов датчиков для измерения напряжений и деформаций. Включение датчиков обычно осуществляют по мостовой схеме.
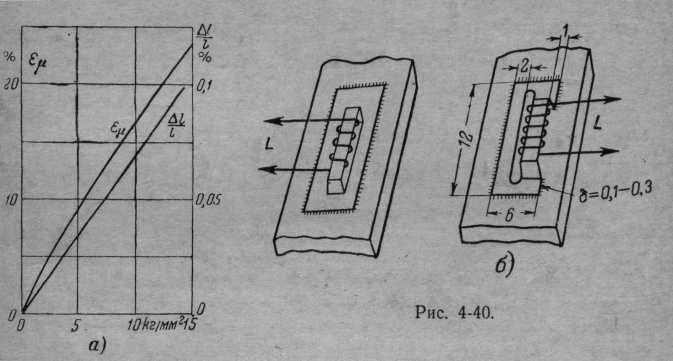
Рис.19
Температурные погрешности при этом доходят до 1% на 1ºС. Поэтому часто для компенсации температурных влияний два одинаковых датчика, находящихся в одинаковых температурных условиях, включают в смежные плечи мостовой схемы. Питание мостовых схем с подобными датчиками осуществляют от источника переменного тока повышенной частоты (f = 5 000 – 50 000 гц).
Датчики с изменяющейся емкостью
Для ряда материалов
существует зависимость относительного
изменения диэлектрической проницаемости
от величины механических напряжений
 .
Эта зависимость может быть использована
для построения емкостных датчиков,
реагирующих на величину усилий. При
этом диэлектрическая проницаемость в
зависимости от величины давления
определяется как
.
Эта зависимость может быть использована
для построения емкостных датчиков,
реагирующих на величину усилий. При
этом диэлектрическая проницаемость в
зависимости от величины давления
определяется как
 .
.
Чувствительность датчика будет равна:
Включение датчика
осуществляется по мостовой или
дифференциальной схеме. Составляя столб
из ряда (n) датчиков
так, чтобы на них воздействовала одна
и а же сила Рх, соединяя
обкладки параллельно, можно получить
достаточно большое значение емкости
датчика CΣ
=nC и
увеличить значение проводимости датчика
 СΣ.
СΣ.
Датчики с изменяющейся ЭДС (пьезоэлектрические датчики)
Устройство датчиков давления с изменяющейся ЭДС основано на использовании пьезоэлектрического эффекта.
На
рис.20 показано расположение осей:
Z – оптической,
Х – электрической и
Y – нейтральной как в кристалле кварца, так и в пластинке датчика, которую обычно вырезают из кристалла.
При действии силы Рх вдоль оси Х на гранях пластинки fx появятся заряды (так называемый продольный пьезоэффект), величина которых определяется следующей зависимостью:
qx = k0Px/
При действии силы Ру вдоль оси Y на тех же гранях
Рис.20 пластинки fx появятся заряды (так называемый поперечный пьезоэффект), величина которых определяется как
 q΄x
= -k
q΄x
= -k ,
,
где fх и fу - площади граней пластинки, перпендикулярные осям Х и Y.
При действии силы РΖ вдоль оси Z пьезоэффект не наблюдается.
Заряды противоположных граней пластинки fx равны между собой и имеют разные знаки. Знаки зарядов определяются напряжением силы Рх (сжатие или растяжение).
Коэффициент k0
называется пьезоэлектрической
постоянной или модулем. Значение k0:
для кварца k0
=
 для
турмалина k0
=
для
турмалина k0
=
 ;
для сегнетовой соли k0
=
;
для сегнетовой соли k0
=
 .
Датчик представляет собой пластинку
кристалла с нанесенными на гранях fx
обкладками. Напряжение между обкладками,
т. е. между гранями fx,
равно:
.
Датчик представляет собой пластинку
кристалла с нанесенными на гранях fx
обкладками. Напряжение между обкладками,
т. е. между гранями fx,
равно:
 ,
,
где С- емкость датчика;
 ;
;
 - диэлектрическая
постоянная материала пластинки;
- диэлектрическая
постоянная материала пластинки;
d – толщина пластинки, см;
fx- площадь грани, перпендикулярной оси Х, см;
С0 – емкость присоединенной к датчику схемы (емкость проводов, промежутка сетка – катод усилительной лампы и т. п.).
Чувствительность датчика определяется как
 .
.
В качестве материала для пластин датчиков чаще всего используют кварц, так как турмалин дорог, а сегнетова соль изменяет свои параметры при изменении температуры и влажности.
В последнее время
в качестве материала для пластин широкое
распространение титанат бария
 .
.