

Вопрос п2
Начертите и опишите схему обратной связи по скорости в электроприводе постоянного тока. Объясните необходимость организации обратных связей. Начертите схему установки датчика обратной связи по скорости. Приведите его характеристики. Укажите способ устранения неисправности в случае положительной обратной связи по скорости Ответ П2
САР, имеющая ОС называется замкнутой. ОС заводится от датчиков ОС на регулятор параметра, замыкая тем самым контур автоматического регулирования. ДОС используются для получения информации о фактическом значении контролируемого параметра. ОС по скорости в ЭП (основная). ОС по скорости необходима для создания широкорегулируемого ЭП
 Uзад
∆U
ω
Uзад
∆U
ω
-Uос
Работа САР состоит в следующем: пусть ненагруженный двигатель вращается с определенной частотой вращения. Этому режиму соответствует на входе блока регуляторов сигнал ΔU, который определяет напряжение на якоре двигателя, а следовательно и частоту вращения. Сигнал ΔU является разностью задающего сигнала и сигнала ОС и называется сигналом рассогласования ΔU = Uзад - Uос
Рассмотрим поведение системы, когда к двигателю прикладывается нагрузка. В первый момент времени частота вращения упадет, т.к. прикладываемая к двигателю энергия уже не может обеспечивать его работу на той же частоте при наличии нагрузки. Тогда вступает в действие ОС. Т.к. частота вращения упала, сигнал ДОС уменьшится. Разность ΔU увеличилась. Следовательно, напряжение на якоре ЭД автоматически прибавилось. В результате, частота вращения вновь увеличилась. Таким образом, благодаря ОС частота вращения практически перестала зависеть от нагрузки, а привод обеспечивает жесткие механические характеристики.
В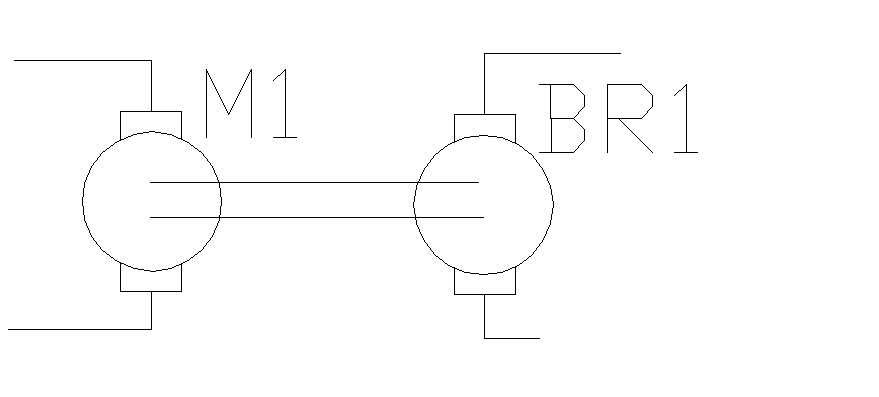 качестве ДОС
по скорости
чаще всего используется тахогенератор.
В ЭП станков
и роботов в большинстве случаев применяют
тахогенератор постоянного тока.
Напряжение
тахогенератора прямо
пропорционально
частоте вращения. Возбуждение
тахогенератора происходит от
постоянных магнитов
(разновидность независимого возбуждения).
Тахогенератор,
как правило, устанавливается на
валу двигателя
на заводе-изготовителе.
качестве ДОС
по скорости
чаще всего используется тахогенератор.
В ЭП станков
и роботов в большинстве случаев применяют
тахогенератор постоянного тока.
Напряжение
тахогенератора прямо
пропорционально
частоте вращения. Возбуждение
тахогенератора происходит от
постоянных магнитов
(разновидность независимого возбуждения).
Тахогенератор,
как правило, устанавливается на
валу двигателя
на заводе-изготовителе.
Чувствительность тахогенератора постоянного тока находится в пределах 20-30 В, что вполне достаточно для большинства приводов. Однако при работе тахогенератора возникают низкочастотные оборотные и полюсные пульсации, величина которых составляет 0,25-1,0% от выходного напряжения. Они вызывают неравномерность вращения ЭП и требуют фильтрации.
ОС может быть «+» или «-». В нашем примере ОС «-», т.к. при отсутствии задающего сигнала, сигнал ОС не увеличивает, а уменьшает напряжение на якоре двигателя. Если неправильно подключить выводы тахогенератора, то ОС станет положительной. При этом ЭД выйдет на уровень максимальной нерегулируемой частоты вращения (вразнос). Чтобы устранить данную неисправность необходимо поменять местами выводы на тахогенераторе. При этом ОС станет снова отрицательной, а привод получит возможность регулирования частоты вращения.