

3.8.1. Скорость направлена по касательной к траектории
Так
как
![]() ,
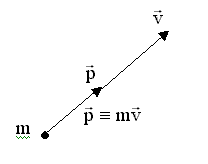
то направление вектора
,
то направление вектора
![]() совпадает
с предельным направлением вектора
совпадает
с предельным направлением вектора
![]() .
На рис. а), б), в) показаны этапы предельного
перехода для плоского движения (для
простоты иллюстрации):
.
На рис. а), б), в) показаны этапы предельного
перехода для плоского движения (для
простоты иллюстрации):
|
|
а) |

При приближении
![]() к
к
![]() ,
,
![]() по
направлению приближается к касательной.
по
направлению приближается к касательной.
|
|
б) |

Как известно из геометрии, касательная есть предельное положение секущей.
|
|
в) |

Значит, скорость направлена по касательной к траектории .
3.8.2. Компоненты скорости
На
следующем рисунке изображен вектор
скорости
![]() материальной
точки M, движущейся по плоскости x, y:
материальной
точки M, движущейся по плоскости x, y:

vx, vy - компоненты скорости, т.е. проекции вектора на координатные оси.
Так
как
![]() .
.
С
другой стороны:
![]() ,
,
откуда
![]() ,
так же и
,
так же и
![]() ,
,
т.е. компоненты скорости равны производным соответствующих координат по времени.
3.8.3. Модуль скорости - производная пути по времени.
 .
.
По
теореме Пифагора: ![]() .
.
3.9. Вычисление пройденного пути
Для
равномерного движения
![]() ,
,
![]() -
весь путь,
-
весь путь,
![]() -
весь отрезок времени,
-
весь отрезок времени, ![]() - const.
- const.

Для произвольного движения:
![]() .
.

v1 в течение отрезка Δti приблизительно постоянны, если Δt достаточно мало. В пределе:
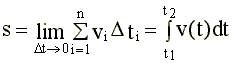 ,
,
т.е. путь - это определенный интеграл от модуля скорости по времени.
3.10. Ускорение - это производная скорости по времени.
 или
или

Учитывая (3.8), получим:

Ускорение - вторая производная радиуса-вектора по времени. Производную по времени от какой-либо величины называют скоростью изменения этой величины. Ускорение - это скорость изменения скорости.
3.10.1. Нормальное и тангенциальное ускорение
Направим
единичный вектор ![]() вдоль вектора скорости:
вдоль вектора скорости:

Тогда
![]()
(по правилу нахождения производной от произведения).
Первый член, нормальное ускорение,
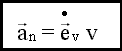
показывает быстроту изменения направления скорости.
Второй, тангенциальное ускорение,
![]()
направлен вдоль скорости и показывает быстроту изменения ее модуля.
Направление и величину нормального ускорения найдем для частного случая равномерного движения материальной точки по окружности:

Направлен
![]() ,
при
,
при
![]() ,
по вектору
,
по вектору
![]() :
:
![]() .
.
 .
.
Нормальное ускорение направлено по нормали к скорости, его модуль:
 .
.
Для движения по произвольной кривой R - радиус кривизны траектории - не будет величиной постоянной.
 .
.
![]() .
.
4. Динамика материальной точки
4.1. Почему в кинематике вводят только две производные от радиус-вектора: первую - скорость
![]() .
.
и вторую - ускорение?
![]() .
.
А если
ввести некую
![]() ?
?
Можно,
но обычно не нужно. Основная задача
механики - предсказать положения тел в
любой момент времени, т.е. предсказать
вид функции
![]() для
всех изучаемых тел. Но в природе не
существует фундаментального закона,
что-либо утверждающего непосредственно
о радиус-векторе материальной точки.
для
всех изучаемых тел. Но в природе не
существует фундаментального закона,
что-либо утверждающего непосредственно
о радиус-векторе материальной точки.
Закон обнаруживается на более глубоком уровне - на уровне второй производной от радиус - вектора:
![]() -
нет закона;
-
нет закона;
![]() -
нет закона;
-
нет закона;
![]() -
есть закон! →
-
есть закон! →
 ,
см. (4.6).
Двигаясь по этой цепочке
"обратным ходом", мы можем, получив
из закона природы (второй закон Ньютона)
ускорение
,
см. (4.6).
Двигаясь по этой цепочке
"обратным ходом", мы можем, получив
из закона природы (второй закон Ньютона)
ускорение
![]() ,
найти сначала
,
найти сначала
![]() ,
затем и
,
затем и
![]() .
Поэтому обычно нет необходимости
дифференцировать
.
Поэтому обычно нет необходимости
дифференцировать
![]() больше,
чем два раза.
больше,
чем два раза.
4.2. Инерциальные системы отсчета. Первый закон Ньютона Инерциальная система отсчета - это система отсчета (3.3), в которой тела, не подверженные воздействию других тел, движутся прямолинейно и равномерно. Первый закон Ньютона:
Всякое тело находится в состоянии покоя или равномерного прямолинейного движения, пока воздействие со стороны других тел не заставит его изменить это состояние .
4.3.
Сила
![]() -
векторная величина, характеризующая
воздействие на данное тело других тел.
Величину силы можно определить опытным
путем, используя прибор для измерения
силы - динамометр.
-
векторная величина, характеризующая
воздействие на данное тело других тел.
Величину силы можно определить опытным
путем, используя прибор для измерения
силы - динамометр.
4.4. Масса тела, m, - скалярная величина, являющаяся мерой инертности тела. Инертность - неподатливость действию силы, свойство тела сохранять величину и направление своей скорости, невозможность ее мгновенного изменения.
4.5. Импульс материальной точки - это вектор, равный, в механике Ньютона, произведению массы точки на ее скорость.
При v → с это определение импульса не годится. Импульс в этом случае (в теории относительности):
 .
.
4.6. Второй закон Ньютона Скорость изменения импульса равна действующей на материальную точку результирующей силе: .
 ,
где
,
где

Из (4.5)
![]()
при m ≠ m(t)
![]() ,
,
т.к.
 (3.10),
то
(3.10),
то
![]() или
или
 .
.