

7. Автоматическое регулирование момента в системе уп-д с настройками на технический и симметричный оптимумы
Ф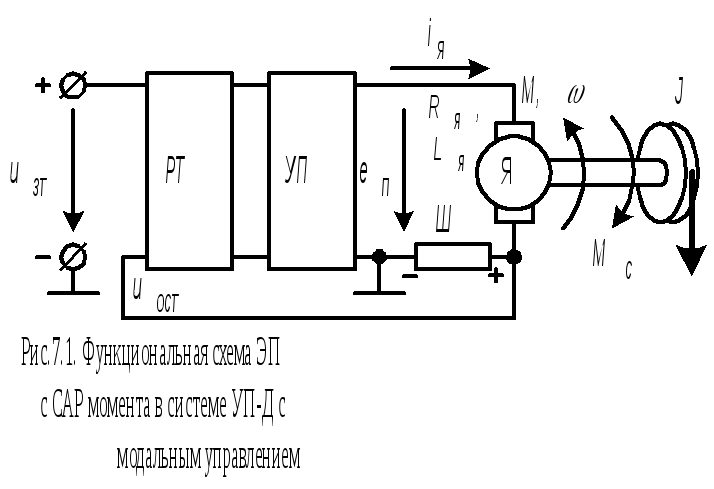 ункциональная
и структурные схемы приведена,
соответственно, на рис.7.1. и рис.7.2.
ункциональная
и структурные схемы приведена,
соответственно, на рис.7.1. и рис.7.2.
Между источником сигнала задания uЗТ и управляемым преобразователем УП установлен регулятор тока РТ. Выбором передаточной функции РТ можно добиться от САУ моментом двигателя желаемых показателей качества, отвечающих техническому или симметричному оптимумам, в частности, достичь регулирования момента с нулевой ошибкой независимо от частоты вращения двигателя. В таком случае будет получена идеальная механическая характеристика (рис.6.5).
Д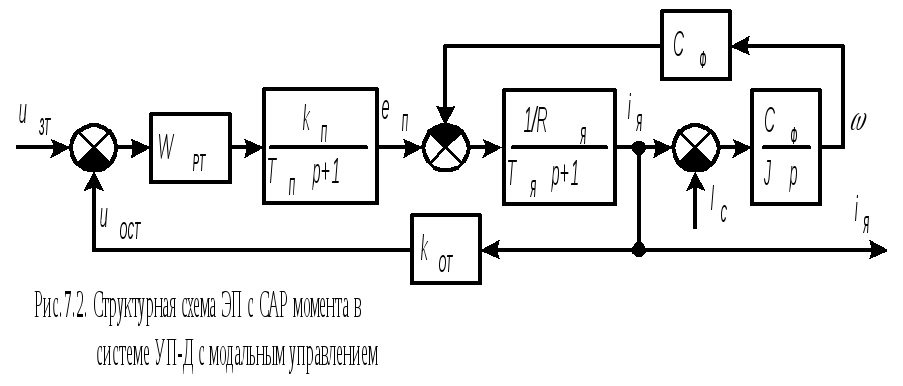 ля
синтеза регулятора РТ
структурную схему АЭП нужно привести
к стандартному виду, подобному на
рис.2.1, у которой имеются следующие
существенные с особенности:
ля
синтеза регулятора РТ
структурную схему АЭП нужно привести
к стандартному виду, подобному на
рис.2.1, у которой имеются следующие
существенные с особенности:
- регулятор и остальная часть АЭП должны быть включены последовательно;
- внешний сигнал должен быть только один;
- обратная связь должна быть единичная.
На рис.7.2 выполнено только первое условие. Наиболее сложно реализовать второе условие. Для выполнения 2-го условия перейдем от физических сигналов к их отклонениям от начальных значений (рис.7.3) и учтем скорости изменения сигналов ΔiЯ и Δω. Скорость изменения ΔiЯ определяется электрическими постоянными времени ТЯ якорной цепи, а скорость изменения Δω определяется механической инерцией привода – механической постоянной ТМ привода (см. тему 4). Для силового электропривода производственных механизмов соотношение указанных постоянных времени таково ТМ >>ТЯ , и, поэтому, скорость изменений Δω намного меньше скорости изменения ΔiЯ. Следовательно можно утверждать, что за время изменения сигнала ΔiЯ сигнал Δω практически не изменится, т.е. будет Δω≈0. В таком случае линию с сигналом Δω, которая на рис.7.3 показана пунктиром, можно разорвать. Вместе с указанным разрывом линии можно убрать все блоки, которые отмечены пунктиром. Вместе с удаленным элементом сравнения будет также удален сигнал ΔΙС. Структурная схема с рис.7.3 превратится в схему на рис.7.4.
Структурная схема с рис.7.4 после очевидных преобразований превратится в структурную схему на рис.7.5, на которой обратная связь единичная.
Передаточная функция неизменяемой части САУ ЭП равна
![]() (7.1)
(7.1)
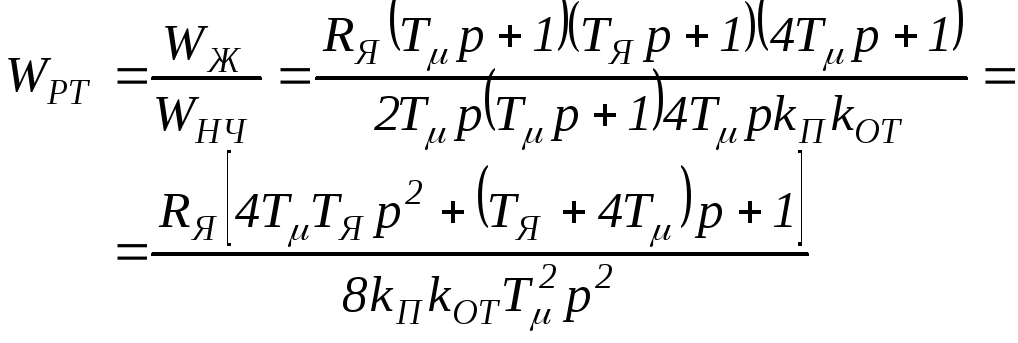
П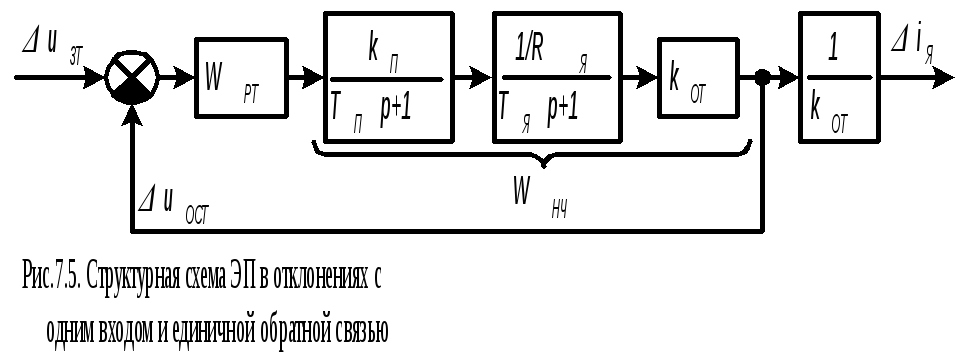 римем
за малую постоянную времени Тμ
постоянную времени ТП
управляемого преобразователя. Тогда
при заданной желаемой передаточной
функции разомкнутой САУ WЖ
передаточная функция регулятора тока
WРТ
определится из равенства WЖ=
WРТ
WНЧ
по формуле
римем
за малую постоянную времени Тμ
постоянную времени ТП
управляемого преобразователя. Тогда
при заданной желаемой передаточной
функции разомкнутой САУ WЖ
передаточная функция регулятора тока
WРТ
определится из равенства WЖ=
WРТ
WНЧ
по формуле
![]() (7.2)
(7.2)
Синтез РТ для САУ моментом ЭП,
настроенной на технический оптимум
Задаемся желаемой передаточной функцией вида
![]() .
.
Тогда в соответствии с (7.2) передаточная функция РТ будет следующей
 (7.3)
(7.3)
Это ПИ-регулятор. Он нечувствителен к помехам, а дрейф его интегратора первого порядка не создает проблем с устойчивостью САУ ЭП.
Синтез РТ для САУ моментом ЭП,
настроенной на симметричный оптимум
Задаемся желаемой передаточной функцией разомкнутой САУ вида
![]() .
.
Тогда в соответствии с (7.2) передаточная функция РТ будет следующей
 (7.4)
(7.4)
Это ПИИ2-регулятор. Хотя в регуляторе нет Д-части, наличие И-части 2-го порядка создает проблемы с устранением дрейфа интеграторов. Поэтому можно ограничиться настройкой на технический оптимум.