

2.Способы модуляции в дискретных системах управления.
Работоспособность систем обеспечивается путем модуляции (амплитудно-импульсную (АИМ) и широтно-импульсную (ШИМ)). Квантование сигнала осуществляется импульсным элементом (рис.14.1).
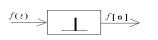
Рис.14.1.Получение решетчатой функции из непрерывной.
При этом условились называть полученную последовательность решетчатой функцией и записывать независимую переменную в квадратных скобках. Решетчатую функцию необходимо предварительно промодулировать. При АИМ процесс модуляции происходит согласно рис.14.2.
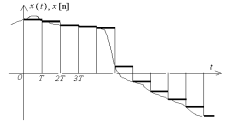
Рис.14.2.Амплитудно-импульсная модуляция
Значение
решетчатой функции в левом конце каждого
интервала продлевается на весь период
квантования. Непрерывная функция
переходит в последовательность
прямоугольных импульсов. Если импульс
единичной высоты и длительностью T
обозначить символом s(t),
то модулированный сигнал
 .
(14.1)
.
(14.1)
При ШИМ высота всех импульсов одинакова. Меняется их длительность, которая пропорциональна значению модулируемой функции в левом конце каждого интервала. В этом случае форма импульса
 ,
(14.2)
,
(14.2)
где
величина
 зависит от значения модулируемой функции
в левом конце интервала. Более определенно
зависит от значения модулируемой функции
в левом конце интервала. Более определенно
 ,
где
,
где
 - точная верхняя грань множества значений
решетчатой функции на всем множестве
значений n
. При таком выборе коэффициента
пропорциональности не будет
«перемоду-ляции», при которой ширина
импульса превысит период квантования.
- точная верхняя грань множества значений
решетчатой функции на всем множестве
значений n
. При таком выборе коэффициента
пропорциональности не будет
«перемоду-ляции», при которой ширина
импульса превысит период квантования.
Аналитическая запись модулированного сигнала будет иметь вид
 .
(14.3)
.
(14.3)
Здесь с – высота импульсов модулированного сигнала. Пример такой модуляции изображен на рис.14.3.
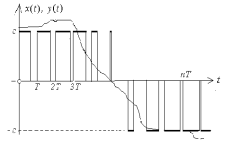
Рис.14.3. Широтно-импульсная модуляция функции x(t).
Функция s(t) вида (14.2) является импульсной переходной функцией формирователя импульсов при ШИМ.
БИЛЕТ № 13
1.Теорема а.М. Ляпунова об устойчивости для систем, допускающих линеаризацию.
Для
того, чтобы уравнение вида
 обладало устойчивым тривиальным
решением, необходимо и достаточно, чтобы
корни характеристического уравнения
обладало устойчивым тривиальным
решением, необходимо и достаточно, чтобы
корни характеристического уравнения
 имели отрицательные вещественные части.
имели отрицательные вещественные части.
В
такой формулировке доказательство
теоремы кажется очевидным. Для этого
достаточно записать решение уравнения
(7.2) в общем виде
 ,
(i=1,2,…n).
,
(i=1,2,…n).
2.Рекуррентные соотношения в дискретных системах управления.
Аналогом дифференциальных уравнений, которыми описываются системы с непрерывным управлением, служат рекуррентные соотношения, которые весьма удобно использовать при программировании. При операциях с рекуррентными соотношениями, проявляются новые свойства дискретных систем. Эти свойства принципиально отличают дискретные системы от аналогичных непрерывных и одновременно указывают на недостатки первых. Рассмотрим простейший пример, поясняющий сказанное.
Пусть
свободное движение непрерывной системы
описывается дифференциальным уравнением
первого порядка вида
 ,
(14.7) решение которого при положительных
значениях единственного параметра
сохраняет устойчивость. При АИМ
производная заменяется разделенной
разностью,
т.е.
,
(14.7) решение которого при положительных
значениях единственного параметра
сохраняет устойчивость. При АИМ
производная заменяется разделенной
разностью,
т.е.
 .
.
Вместо
(14.7) появляется рекуррентное соотношение
вида
 .
.
Нетрудно
заметить, что при периоде квантования
 оно порождает расходящуюся
последовательность. Этот факт является
общим для рекуррентных соотношений
вида
оно порождает расходящуюся
последовательность. Этот факт является
общим для рекуррентных соотношений
вида
 ,
где lambda
играет ту же
роль, что и корень характеристического
уравнения. Однако условием устойчивости
на этот раз служит неравенство
,
где lambda
играет ту же
роль, что и корень характеристического
уравнения. Однако условием устойчивости
на этот раз служит неравенство
 (в отличие от прежнего условия Re
lambda<0).
Выполнение этого условия в случае
единственного корня легко проверяется,
но при наличии системы из многих
рекуррентных соотношений проблема
оказывается связанной с необходимостью
решения алгебраического уравнения
высокой степени.
(в отличие от прежнего условия Re
lambda<0).
Выполнение этого условия в случае
единственного корня легко проверяется,
но при наличии системы из многих
рекуррентных соотношений проблема
оказывается связанной с необходимостью
решения алгебраического уравнения
высокой степени.
БИЛЕТ № 14