

Министерство образования Республики Беларусь
БЕЛОРУССКИЙ НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
МЕХАННИКО-ТЕХНОЛОГИЧЕСКИЙ ФАКУЛЬТЕТ
Кафедра: ” Материаловедение в машиностроении“
Курсовой проект
По дисциплине: “ Математическое моделирование “
По теме: “ Решение систем нелинейных уравнений методом конечных разностей“
Выполнил:
Студент группы 104218 Дубатовка С.В.
Проверил: доцент Мельниченко В.В
.
Дата: 08.12.11
Минск 2011
Содержание
Введение…………………………………………………………………………4
МЕТОДЫ РЕШЕНИЯ СИСТЕМ НЕЛИНЕЙНЫХ УРАВНЕНИЙ………….5
ВЕКТОРНАЯ ЗАПИСЬ НЕЛИНЕЙНЫХ СИСТЕМ…………………………5
МЕТОД КОНЕЧНЫХ РАЗНОСТЕЙ, ИЛИ МЕТОД СЕТОК………….........6
ПРИБЛИЖЁННОЕ РЕШЕНИЕ КРАЕВЫХ ЗАДАЧ И ЗАДАЧ О СОБСТВЕННЫХ ЗНАЧЕНИЯХ МЕТОДА КОНЕЧНЫХ РАЗНОСТЕЙ…16
РЕШЕНИЕ СИСТЕМ НЕЛИНЕЙНЫХ УРАВНЕНИЙ………………………….19
РЕШЕНИЕ ЗАДАЧ В MathCad……………………………………………….23
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ…………………………..33
ВВЕДЕНИЕ
Базовый уровень подготовки инженера-технолога в области информатики и вычислительной техники определяется необходимым набором знаний, умений и навыков в применении ЭВМ для решения различных технических задач.
Специалисты этой категории, помимо умения использовать прикладное программное обеспечение, должны быть программирующими пользователями, т.к. их профессиональная деятельность связана с выполнением большого количества теплотехнических расчетов.
Для соблюдения принципа фундаментальности высшего образования работа построена на базе рассмотрения вопросов применения ЭВМ для решения основных задач теории теплообмена. К одной из таких задач относится задача, связанная с определением температурного поля не одномерных тел численными методами.
Рассмотрим методику подготовки и решения указанной задачи на персональном компьютере.
1. Методы решения систем нелинейных уравнений
Рассматривается ряд методов решения систем алгебраических и трансцендентных уравнений. Среди них метод простых итераций, метод конечных разностей, метод Ньютона в разных модификациях (в частности, n -полюсный метод Ньютона), метод Брауна, метод секущих Бройдена. Показывается связь между данной задачей и за дачей безусловной минимизации функции нескольких переменных. Проводится сравнение методов на примере решения конкретной системы. С единых позиций изучается сходимость основного и упрощенного методов Ньютона и метода, получаемого из метода Ньютона применением итерационного процесса Шульца для приближенного обращения матриц Якоби.
2. Векторная запись нелинейных систем.
Пусть требуется решить систему уравнений
 (1.1)
(1.1)
где![]() —
заданные, вообще говоря, нелинейные
(среди них могут быть и линейные)
вещественнозначные функции п
вещественных
переменных
—
заданные, вообще говоря, нелинейные
(среди них могут быть и линейные)
вещественнозначные функции п
вещественных
переменных![]() Обозначив
Обозначив
 ,
,
 ,
,
данную систему (2.1) можно записать одним уравнением
![]() (1.1а)
(1.1а)
относительно
векторной функции F
векторного
аргумента х. Таким образом, исходную
задачу можно рассматривать как задачу
о нулях нелинейного отображения
![]() В
этой постановке она является прямым
обобщением основной задачи предыдущей
главы — задачи построения методов
нахождения нулей одномерных нелинейных
отображений. Фактически это та же задача,
только в пространствах большей
размерности. Поэтому можно как заново
строить методы ее решения на основе
разработанных выше подходов, так и
осуществлять формальный перенос
выведенных для скалярного случая
расчетных формул. В любом случае следует
позаботиться о правомочности тех или
иных операций над векторными переменными
и векторными функциями, а также о
сходимости получаемых таким способом
итерационных процессов. Часто теоремы
сходимости для этих процессов являются
тривиальными обобщениями соответствующих
результатов, полученных для методов
решения скалярных уравнений. Однако не
все результаты и не все методы можно
перенести со случая п
=
1 на случай п
≥2.
Например, здесь уже не будут работать
методы дихотомии, поскольку множество
векторов не упорядочено. В то же время,
переход от n
= 1 до n≥2
вносит в задачу нахождения нулей
нелинейного отображения свою специфику,
учет которой приводит к новым методам
и к различным модификациям уже имеющихся.
В частности, большая вариативность
методов решения нелинейных систем
связана с разнообразием способов,
которыми можно решать линейные
алгебраические задачи, возникающие при
пошаговой линеаризации данной нелинейной
вектор-функции F(x).
В
этой постановке она является прямым
обобщением основной задачи предыдущей
главы — задачи построения методов
нахождения нулей одномерных нелинейных
отображений. Фактически это та же задача,
только в пространствах большей
размерности. Поэтому можно как заново
строить методы ее решения на основе
разработанных выше подходов, так и
осуществлять формальный перенос
выведенных для скалярного случая
расчетных формул. В любом случае следует
позаботиться о правомочности тех или
иных операций над векторными переменными
и векторными функциями, а также о
сходимости получаемых таким способом
итерационных процессов. Часто теоремы
сходимости для этих процессов являются
тривиальными обобщениями соответствующих
результатов, полученных для методов
решения скалярных уравнений. Однако не
все результаты и не все методы можно
перенести со случая п
=
1 на случай п
≥2.
Например, здесь уже не будут работать
методы дихотомии, поскольку множество
векторов не упорядочено. В то же время,
переход от n
= 1 до n≥2
вносит в задачу нахождения нулей
нелинейного отображения свою специфику,
учет которой приводит к новым методам
и к различным модификациям уже имеющихся.
В частности, большая вариативность
методов решения нелинейных систем
связана с разнообразием способов,
которыми можно решать линейные
алгебраические задачи, возникающие при
пошаговой линеаризации данной нелинейной
вектор-функции F(x).
3. Метод конечных разностей, или метод сеток
Универсальным численным методом решения граничных задач, в основе которых лежат дифференциальные уравнения n-го порядка, являются методы конечных разностей (сеток). Достоинство конечно-разностных методов состоит в том, что они сводят решение краевой задачи для дифференциального уравнения к решению системы алгебраических уравнений относительно значений искомой функции на заданном множестве точек. Это достигается путем замены производных, входящих в дифференциальное уравнение, их конечно-разностными аппроксимациями.
Чтобы решить задачу (1)-(3) методом конечных разностей, необходимо выполнить следующее:
1. Заменить
область непрерывного изменения аргумента
дискретным множеством точек, т.е. на
отрезке [a,b]
строится сетка ![]() ,
где
,
где ![]() –
узлы сетки
–
узлы сетки ![]() , i=0,1,…,n;
точки
, i=0,1,…,n;
точки ![]() и
и ![]() -
это граничные узлы сетки
-
это граничные узлы сетки![]() ,
все остальные узлы называются внутренними.
Величина
,
все остальные узлы называются внутренними.
Величина ![]() i=0,1,…,n-1
называется шагом сетки
i=0,1,…,n-1
называется шагом сетки ![]() .
Количество и расположение узлов сетки
выбирается в зависимости от требуемой
точности решения задачи, в частном
случае сетка выбирается равномерной,
т.е.
.
Количество и расположение узлов сетки
выбирается в зависимости от требуемой
точности решения задачи, в частном
случае сетка выбирается равномерной,
т.е. ![]() и
шаг сетки в этом случае выбирается
как h=(b-a)/n.
и
шаг сетки в этом случае выбирается
как h=(b-a)/n.
2. Заменить (аппроксимировать на сетке) дифференциальное уравнение (1) и граничные условия (2)-(3) разностными уравнениями. Для этого
в каждом
узле сетки ![]() i определяем сеточную
функцию
i определяем сеточную
функцию ![]() .
.
заменяем значения производной отношением конечных разностей;
переходим
от непрерывного дифференциального
уравнения относительно
функцииu=u(x), (аргумент х –
непрерывен) к разностной задаче
относительно сеточной функции ![]() .
.
в итоге
граничная задача (1)-(3) заменяется системой
алгебраических уравнений относительно
сеточной функции ![]() ;
Эта система алгебраических уравнений
называется разностной схемой.
;
Эта система алгебраических уравнений
называется разностной схемой.
3. необходимо
решить систему алгебраических уравнений
относительно сеточной функции ![]() и
тем самым найти таблицу значений этой
сеточной функции, являющейся приближенным
решением исходной краевой задачи.
и
тем самым найти таблицу значений этой
сеточной функции, являющейся приближенным
решением исходной краевой задачи.
Простейшим способом построения конечно-разностной системы алгебраических уравнений является замена производных через значения функции в узлах сетки. Такая замена может быть получена различными способами.
Рассмотрим линейную краевую задачу
 (1.24)
(1.24)
 (1.25)
(1.25)
![]() ,
,
где
![]() ,
,
![]() ,
и
,
и
![]() непрерывны на [a, b].
непрерывны на [a, b].
Разобьем отрезок [a, b] на n равных частей длины, или шага
 .
.
Точки разбиения
![]() ,
, ![]()
называются
узлами,
а их совокупность – сеткой на
отрезке [a, b].
Значения в узлах искомой функции
![]() и
ее производных
и
ее производных
![]()
![]() обозначим
соответственно через
обозначим
соответственно через
![]() .
.
Введем обозначения
![]()
Заменим производные так называемыми односторонними конечно-разностными отношениями:
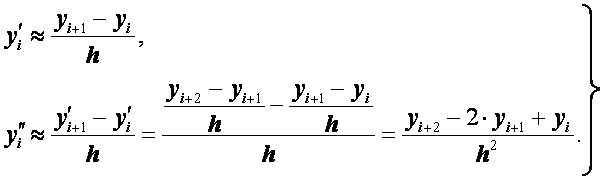 (1.26)
(1.26)
Формулы (2.26) приближенно выражают значения производных во внутренних точках интервала [a, b].
Для граничных точек положим
 .
(1.27)
.
(1.27)
Используя формулы
(1.26), дифференциальное уравнение (1.24)
при ![]() ,
(i=1,
2,..., n–1)
приближенно можно заменить линейной
системой уравнений
,
(i=1,
2,..., n–1)
приближенно можно заменить линейной
системой уравнений
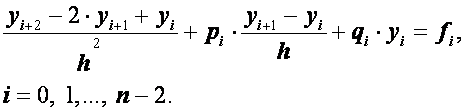 (1.28)
(1.28)
Кроме того, в силу формул (1.27) краевые условия (1.25) дополнительно дают еще два уравнения:
 .
(1.29)
.
(1.29)
Таким образом,
получена линейная система
n+1
уравнений с
n+1
неизвестными ![]() ,
представляющими собой значения искомой
функции
,
представляющими собой значения искомой
функции ![]() в
узлах сетки. Система уравнений (1.28),
(1.29), заменяющая приближенно дифференциальную
краевую задачу
(1.24), (1.25)
обычно
называется разностной
схемой.
Решить эту систему можно каким-либо
общим численным методом. Однако схема
(1.28), (1.29) имеет специфический вид и ее
можно эффективно решить специальным
методом, называемым методом прогонки.
Специфичность системы заключается в
том, что уравнения ее содержат три
соседних неизвестных и матрица этой
системы является трехдиагональной.
в
узлах сетки. Система уравнений (1.28),
(1.29), заменяющая приближенно дифференциальную
краевую задачу
(1.24), (1.25)
обычно
называется разностной
схемой.
Решить эту систему можно каким-либо
общим численным методом. Однако схема
(1.28), (1.29) имеет специфический вид и ее
можно эффективно решить специальным
методом, называемым методом прогонки.
Специфичность системы заключается в
том, что уравнения ее содержат три
соседних неизвестных и матрица этой
системы является трехдиагональной.
Преобразуем уравнения (1.28):
![]() .
(1.30)
.
(1.30)
Введя обозначения
получим
![]() ,
(i=0,
1,..., n-2).
(1.31)
,
(i=0,
1,..., n-2).
(1.31)
Краевые условия по-прежнему запишем в виде
 .
(1.32)
.
(1.32)
Метод прогонки состоит в следующем.
Разрешим уравнение
(1.31) относительно ![]() :
:
 .
(1.33)
.
(1.33)
Предположим, что
с помощью полной системы (1.31) из уравнения
исключен член, содержащий![]() .
Тогда уравнение (1.33) может быть записано
в виде
.
Тогда уравнение (1.33) может быть записано
в виде
![]() ,
(1.34)
,
(1.34)
где
![]() и
и
![]() должны
быть определены. Найдем формулы для
этих коэффициентов. При i=0
из формулы (1.33)
и краевых условий (1.32)
следует, что
должны
быть определены. Найдем формулы для
этих коэффициентов. При i=0
из формулы (1.33)
и краевых условий (1.32)
следует, что
Исключая из этих
двух уравнений ![]() ,
найдем
,
найдем
 .
.
Выразим теперь
отсюда ![]() :
:
 (1.35)
(1.35)
Но, согласно формуле (1.34),
![]() (1.36)
(1.36)
Сравнивая теперь (1.35) и (1.36), найдем, что
 (1.37)
(1.37)
Пусть теперь
i >0,
то есть i=1,
2,..., n–2.
Выражая ![]() по
формуле (1.34), получим:
по
формуле (1.34), получим:
![]() .
.
Подставляя это в формулу (2.33), будем иметь
 .
.
Разрешая полученное
уравнение относительно![]() ,
находим
,
находим
 ,
или
,
или
 .
(1.38)
.
(1.38)
Отсюда, сравнивая
формулы (1.34) и (1.38), получаем для
коэффициентов
![]() и
и
![]() рекуррентные формулы:
рекуррентные формулы:
 (1.39)
(1.39)
Так как
![]() и
и
![]() уже
определены по формулам (1.37), то, используя
формулы (2.39), можно последовательно
определить коэффициенты
уже
определены по формулам (1.37), то, используя
формулы (2.39), можно последовательно
определить коэффициенты
![]() и
и
![]() до
до
![]() и
и
![]() включительно.
Эти вычисления называются прямым
ходом метода
прогонки.
включительно.
Эти вычисления называются прямым
ходом метода
прогонки.
Из формулы (1.33) при i=n–2 и второго краевого условия (1.32) получаем
Разрешая эту
систему относительно![]() ,
будем иметь
,
будем иметь
 .
(1.40)
.
(1.40)
Теперь, используя
(1.34) и первое краевое условие (1.32), мы
можем последовательно найти
![]() .
Это − обратный
ход метода
прогонки.
.
Это − обратный
ход метода
прогонки.
Итак, получаем следующую цепочку:
 (1.41)
(1.41)
Для простейших
краевых условий ![]()
формулы для
![]() и
и ![]() упрощаются.
Полагая в этом случае
упрощаются.
Полагая в этом случае
![]() из
формул (1.37), (1.40), (1.41) будем иметь
из
формул (1.37), (1.40), (1.41) будем иметь
Рассмотренный нами подход сводит линейную краевую задачу к системе линейных алгебраических уравнений. При этом возникает три вопроса.
1) Существует ли решение алгебраической системы типа (1.31)?
2) Как фактически находить это решение?
3) Сходится ли разностное решение к точному при стремлении шага сетки к 0?
Можно доказать, что если краевая задача имеет вид
причем р(x)>0, то решение системы (1.31), (1.32) существует и единственно. Фактическое отыскание решения можно провести, например, методом прогонки. На третий вопрос дает ответ следующая
Теорема
Если ![]() и
и ![]() дважды
непрерывно дифференцируемы,
то разностное решение, соответствующее
схеме с заменой
дважды
непрерывно дифференцируемы,
то разностное решение, соответствующее
схеме с заменой

равномерно
сходится к точному с
погрешностью
![]() при
при
![]()
Таким образом, схема (1.28), (1.29) дает приближенное решение краевой задачи, но точность ее весьма мала. Это связано с тем, что аппроксимация производной
имеет низкий порядок точности − погрешность этой аппроксимации

Более точную разностную схему можно получить, если при переходе от линейной краевой задачи к конечно-разностным уравнениям воспользоваться центральными формулами для производных:
 ,
(1.42)
,
(1.42)
 ,
(1.43)
,
(1.43)
i=1, 2,..., n.
Погрешность формулы (1.42) выражается так:

то есть формула (1.42) имеет второй порядок точности относительно шага сетки h. Подставляя выражения (1.42), (1.43) в задачу (1.24), (1.25) и выполняя некоторые преобразования, получим следующую систему:
 (1.44)
(1.44)
Где
 .
.
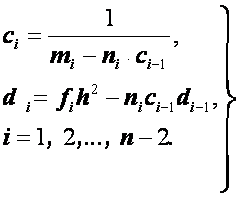
Система (1.44) снова трехдиагональная и ее решение также можно получить методом прогонки. Его алгоритм здесь будет выглядеть так. Сначала находят коэффициенты
 (1.45)
(1.45)
Затем определяют
коэффициенты ![]() по
следующим рекуррентным формулам:
по
следующим рекуррентным формулам:
 (1.46)
(1.46)
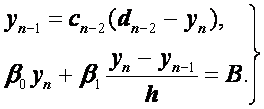
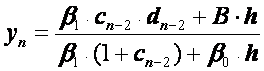
Обратный ход
начинается с нахождения ![]() :
:
 (1.47)
(1.47)
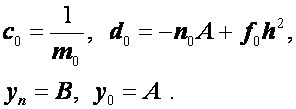
После этого находим
![]() по формулам:
по формулам:
![]() ,
(1.48)
,
(1.48)
 .
(1.49)
.
(1.49)
Относительно схемы (1.44) можно также доказать, что она имеет единственное решение при
 и
и
 ,
,
и это решение может быть найдено описанным методом прогонки. Кроме того, для схемы (1.44) имеет место
Теорема
Пусть решение граничной задачи (1.24), (1.25) единственно и непрерывно дифференцируемо на [a, b] до четвертого порядка точности включительно. Если выполняются условия
 ,
,  ,
, ![]()
то схема (1.44) будет
равномерно сходиться к решению
задачи (1.24),
(1.25) с
погрешностью
![]() .
.
Заметим, что условия, приводимые в теоремах, являются достаточными, а отнюдь не необходимыми. Поэтому в практике численных расчетов нарушение этих условий обычно не вызывает заметного ухудшения расчетных схем.