

4.Технічні вимоги до івп.
ІВП призначений для перетворення контрольованих температур в двійковий код та послідовної передачі результатів в лінію зв’язку. Операції аналого-цифрового перетворення здійснюються всіма ІВП одночасно за командою від ПК, а передача результатів - послідовно за заданими з ПК адресами ІВП. Таким чином, тривалість циклу вимірювання всіх температур становить:
Твим = m tвим + tпер n,
де m - кількість вимірюваних температур одним ІВП; tвим - час вимірювання однієї температури; tпер - тривалість передачі результатів вимірювання від ІВП; n - кількість ІВП в системі.
Якщо m=6, то, згідно заданої сумарної кількості вимірюваних температур, n=250. Тобто, швидкодія системи буде значною мірою визначатися швидкістю передачі результатів вимірювання.
Провівши необхідні розрахунки на основі наведених вище технічних вимог до системи багатоточкового контролю температури, отримаємо наступні вимоги до технічних характеристик ІВП.
|
Характеристика |
Значення |
|
Діапазон вимірюваних температур |
(-30 …+60)°С |
|
Тип термоперетворювача опору (ТО) |
Cu50 |
|
Гранична основна зведена до діапазону похибка вимірювання температури з врахуванням похибки чутливих елементів не більше |
±1,0 % |
|
Споживана потужність одного ІВП не більше |
0,1 Вт |
|
Максимальна кількість ІВП в системі (n) |
256 |
|
Максимальна кількість ТО для одного ІВП (m) |
6 |
|
Тривалість одного циклу вимірювання для максимальної кількості ІВП та максимальної кількості ТО в одному ІВП не більше |
20с. |
|
Діапазон робочих температур |
(-40...+60)С |
Похибка вимірювання не повинна виходити за межі заданої основної похибки у всьому діапазоні робочих температур.
Враховуючи вимогу мінімізації кількості ліній в каналі між БЖГР та ІВПі, необхідно забезпечити уніполярне живлення ІВП. Первинний перетворювач ТОМІ-0695 вибираємо з каталога виробів НВО “Термоприлад”. Перетворювач призначений для вимірювання температури cипучих матеріалів.
5.Синтез функціональної схеми івп.
Всі ІВП є ідентичними конструктивно завершеними пристроями, які, в свою чергу, можна умовно розділити на дві структурні частини: БЕ - блок електроніки; БПП - блок первинних перетворювачів (рис.2). БПП являє собою армований кабель з вбудованими термоперетворювачами опору. Така конструкція БПП забезпечує високу міцність на розрив. Всі чутливі елементи з’єднано послідовно з джерелом струму. Кожен чутливий елемент має потенційні відводи.
ВК забезпечує почергову подачу спадків напруги на кожному з ТО та калібрувальних напруг на вхід ДП. Вихідна напруга ДП подається на вхід АЦП, де перетворюється в цифровий код. Результати перетворень після математичної обробки з допомогою МП трансформуються в відповідні значення вимірюваної температури, що передаються на ПК.
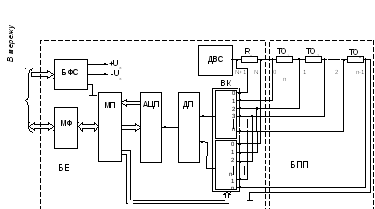
Рис.2. Функціональна схема ІВП.
Тут: БЕ - блок електроніки;
БФС - блок фільтрації та стабілізації живлення;
МФ - мережний формувач;
МП - мікропроцесор;
АЦП - аналого-цифровий перетворювач;
ДП - диференцийний підсилювач;
ВК - вхідний комутатор;
ДВС - джерело вимірювального струму;
БПП - блок первинних перетворювачів;
ТОi - термометри опору.
Загальна функція перетворення ІВП. Згідно запропонованої функціональної схеми ІВП проводимо аналіз перетворень вихідної величини чутливого елемента, в даному випадку активного опору ТО. Диференціальна напруга Uxі на і-ому ТО визначається:
Uxі= I Rxі, (1)
де I - струм через ТО; Rxі - активний опір і-го ТО.
Напруга Uxі подається через два одночасно ввімкнених канали комутатора на вхід ДП. Таким чином, напруга на вході ДП рівна:
UДПі= Uxі Kkді, (2)
де Kkді - коефіцієнт передачі вхідного комутатора для і-го диференціального сигналу, що визначається наступним виразом:
Kkді=RДПд/(RДПд+Rkі+ Rk(і+1)+Rxi), (3)
де RДПд - диференціальний вхідний опір ДП; Rkі - опір і-го каналу комутатора в відкритому стані.
Напруга на вході АЦП, якщо вважати ДП лінійним, а його вихідний опір порівняно з вхідним опором АЦП нехтуюче малим, буде описуватись виразом:
UАЦПі= Кu (Uxі Kkді + UЗМ ), (4)
де Кu - коефіцієнт підсилення ДП; UЗМ - напруга зміщення ДП.
Також необхідно врахувати, що кожне з перетворень здійснюється через індивідуальний канал комутатора, опір якого у ввімкненому стані подамо у наступному вигляді
RКі = RК + Кі , (5)
де RК - типове значення опору каналу; Кі- абсолютне відхилення опору і-го каналу від типового значення.
Розглянемо найгірший випадок, коли опори RКі та RК(і+1) мають найменше значення, а опори RКN та RК(N+1) - найбільше, або навпаки, тобто, розкид значень опорів відкритих каналів комутатора є найбільшим. Вважаємо, що (RКN+RК(N+1))=2(RК+Кmax), а (RКі+RК(і+1))=2(RК-Кmax), де Кmax - максимально допустиме відхилення опору каналу комутатора від номінального значення. Відповідно будемо розрізняти мінімільне та максимальне значення коефіцієнтів передачі
Kkд min= RДПд / (RДПд+2(RК+k max)+Rxi), (6)
Kkд max= RДПд / (RДПд+2(RК - k max)+Rxi), (7)
Звідси:
Kkд min= А Kkд max, (8)
де![]()
Поряд з диференціальною напругою на вхід ДП діє синфазна напруга, що визначається значенням струму І через ТО та сумарним опором послідовної вимірювальної ланки, котра знаходиться нижче активного в даному циклі перетворення опору (опору, спадок напруги на якому підлягає перетворенню).
Вплив синфазної напруги, що діє на вході ДП, на значення вхідної напруги АЦП буде визначатись через коефіцієнт передачі синфазної складової ДП – КПСС [18, 19]. Якщо під коефіцієнтом передачі синфазної напруги розуміти відношення приросту вихідної напруги ДП до приросту вхідної синфазної напруги при нульовій вхідній диференціальній напрузі, то вираз (4) можна подати у вигляді:
UАЦПі = Ku [Uxi Kkді + Uзм] + КПСС UCi, (9)
де UCi – синфазна напруга на вході ДП при перетворені опору ТОі
Функція перетворення АЦП має вигляд
Nxі= (K UАЦПі / U0 )+ Nзм , (10)
де U0 - опорна напруга АЦП; K - коефіцієнт пропорційності перетворення, що визначається особливостями роботи АЦП; Nзм - значення вихідного коду АЦП, що відповідає його адитивному зміщенню. В загальному випадку значення коефіцієнта К залежить від вхідного сигналу АЦП, що характеризується його нелінійністю.
Таким чином, виходячи з виразів (1…10), функція перетворення вимірювального тракту ІВП без врахування випадкової складової похибки (зумовленої квантуванням аналового сигналу та впливом завад і власних шумів) має наступний вигляд
Nxі= Кu K I Rxі Kkді /U0 + K Кu Uзм / U0 + Nзм + К КПСС UCi / U0 (11)
і містить низку параметрів, значення яких можуть мати значні відхилення від номінальних, часову нестабільність і залежать від різних експлуатаційних чинників (температури, вібрації, тиску і ін.). Це, в свою чергу, може спричинити значні похибки перетворення.
Оскільки в ІВП передбачається використання МП, то, з метою усунення вказаних похибок, доцільно ввести додаткові цикли перетворення для організації автокалібрування вимірювального тракту. Розглянемо один із можливих варіантів алгоритму калібрування, для реалізації якого послідовно з ТО необхідно ввімкнути еталонний резистор RN. На основі перетворення спадків напруг на ТО, еталонному резисторі та нульового диференційного потенціалу згідно виразу (11) формується система трьох рівнянь. Тут робимо допущення, що за час вказаних перетворень значення струму І через послідовну ланку не змінюється. Більш інерційні зміни значення вимірювального струму не будуть впливати на результат вимірювання. Тому, прийнявши, що зміна контрольованої температури, а отже і опорів ТО, в часі є процес достатньо інерційний, джерело струму може бути реалізовано на основі джерела напруги (наприклад, напруги живлення схеми) та струмозадаючого резистора. Враховуючи уніполярне живлення схеми, доцільно застосувати два однакових струмозадаючі резистори, один з яких ввімкнено між послідовною вимірювальною ланкою та спільним провідником, а інший - між послідовною вимірювальною ланкою та джерелом напруги живлення. Це дозволить більш ефективно використати динамічний діапазон ДП і уникнути виходу значень його вхідних напруг за лінійну ділянку характеристики перетворення. Таке схемотехнічне рішення обумовлене специфічною будовою БПП.
Згідно структури БПП, що являє собою послідовну вимірювальну ланку, синфазна напруга на вході ДП при перетворенні опору ТОі буде визначатись
UСі= І (RІ+ Rxn+ Rx(n-1)+…+Rx(i-1)), (12)
де RІ - значення опору струмозадаючoго резистора (під’єднаного до спільного провідника); і - номер ТО, що підлягає перетворенню. При перетворенні опору еталонного резистора відповідно:
UСN= І (RІ+ RТО), (13)
де RТО - сумарний опір всіх ТО. Калібрувальний диференційний нульовий потенціал на вході ДП формуватимемо на рівні синфазної напруги UСN шляхом її одночасної подачі на диференційні входи ДП через відповідні канали ВК.
Таким чином, в результаті проведення трьох циклів перетворень, отримаємо наступну систему рівнянь:
N x1=Кu
K Rx1Kkд
max/U0+КпссІK(RІ+Rxn+Rx(n-1)+…+Rx(i-1))
/U0+KKuUЗМ/U0
+
Nзм (14)
x1=Кu
K Rx1Kkд
max/U0+КпссІK(RІ+Rxn+Rx(n-1)+…+Rx(i-1))
/U0+KKuUЗМ/U0
+
Nзм (14)
NN= Кu KIRN Kkд min /U0+КпссІK(RІ+RТО)/U0 +KKuUЗМ/U0+ Nзм (15)
N0= КпссІK(RІ+RТО) /U0 +KKuUЗМ/U0+ Nзм (16)
В
(17)
з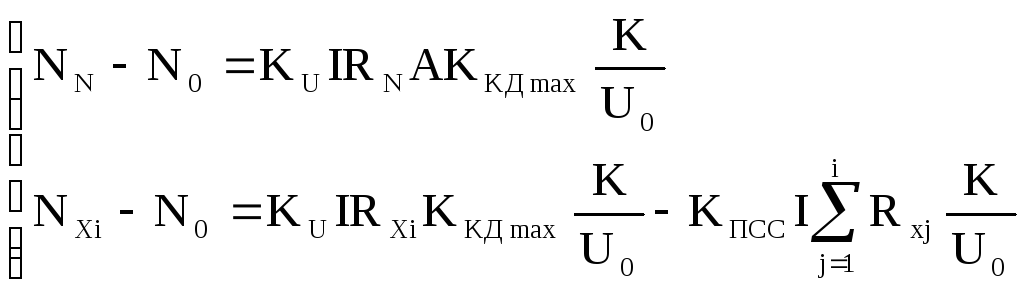 відки
відки
![]() , (18)
, (18)
де
![]() . (19)
. (19)
Згідно технічного завдання та наведених вище міркувань в якості первинного перетворювача температури використовується ТОМІ-0695, в якому вмонтовані мідні термометри опору Cu50 з статичною характеристикою, що описується виразом [1, 2, 9]:
Rxi=R0i (1+ i Ti), (20)
Де R0i – опір ТОі при температурі 0С; i – температурний коефіцієнт опору (для міді = 4,28 10-3 С-1); Ti – температура в і-ій зоні БПП. Таким чином, значення вимірюваної температури визначатиметься на основі виразу
![]() . (21)
. (21)
Проведемо оцінювання значень коефіцієнтів А та В. Згідно виразу (8) максимальне значення Амах=1, а мінімальне визначається співвідношенням опору відкритого каналу комутатора і вхідного опору ДП. Для прикладу, RДПд10 МОм (для багатьох інтегральних ДП), RK=1кОм, К max=300 Ом (для К561 КП2 при Uж=5В ), відповідно Аmin0,99988. Коефіцієнт В приймає мінімальне значення при вимірюванні опору ТО1 і визначається як
Вmin=КПСС
I
Rx1![]() . (22)
. (22)
Максимальне значення коефіцієнта В в свою чергу рівне
Вмах
= КПСС
I
RТО![]() .
(23)
.
(23)
Значення КПСС в більшості випадків нормують мінімальним граничним значенням і в конкретного ДП може мати суттєво відмінні значення від заданих (для ДП, реалізованого на дискретних ОП КПСС значною мірою визначається ідентичністю значень опору резисторів по обох входах підсилювача [18, 19]). Тому врахувати дійсне значення В у виразі для визначення вимірюваного опору RХі складно.
Таким чином, номінально алгоритм вимірювання описується виразом:
![]() . (24)
. (24)
Проведемо оцінювання граничної похибки вимірювання температури на основі (21). Як відомо, гранична абсолютна похибка може бути визначена згідно виразу [14]:
![]() , (25)
, (25)
де F – функція перетворення пристрою; Xі, Xі, і – компоненти функції F та їх граничні абсолютні і відносні похибки (відхилення від номінальних значень); m – кількість складових похибки.
Якщо задатися певною імовірністю Рдов та вважати закон розподілу випадкових складових рівномірний (найгірший випадок), то можна оцінити довірчі границі абсолютної похобки за виразом [17]
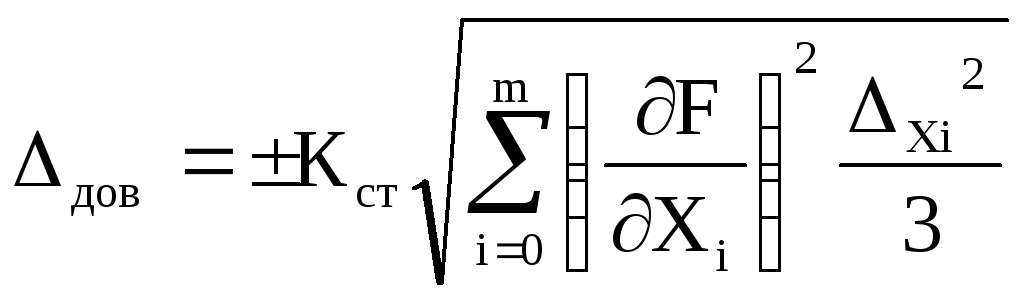 , (26)
, (26)
де Кст – коефіцієнт, що залежить від довірчої ймовірності (наприклад, для заданої імовірності Рдов 0,95, Кст=1,96).
Таким чином, на основі (21) отримаємо наступну залежність абсолютної похибки вимірювання температури від параметрів ланок вимірювального тракту та їх граничних абсолютних похибок:
![]() , (27)
, (27)
де
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Тут: Nx, NN, No – випадкові складові похибки кожного аналого-цифрового перетворення, виражені в одиницях молодшого розряду (зумовлені квантуванням аналогового сигналу, власними шумами, диференційною нелінійністю АЦП та впливом електромагнітних завад); RN – абсолютна похибка значення опору еталонного резистора; А, В – абсолютні граничні відхилення значень коефіцієнтів А і В від номінальних; , Ro - абсолютні граничні відхилення значень коефіцієнтів і R0 від номінальних (в відповідності до класу чутливого елемента).
Таким чином, якщо вважати, що гранично випадкові складові похибки кожного з трьох перетворень не перевищують допустимого значення N, вираз (27) можна подати у вигляді:
![]() , (28)
, (28)
де
![]() .
.
Тут прийнято, що RNRx, оскільки в іншому випадку значення вагового коефіцієнта М1 зростає і призводить до значного впливу похибки опору еталонного резистора RN. З іншого боку доцільно прийняти RN=Rxmax з метою ефективного використання динамічного діапазону АЦП і, відповідно, зменшення впливу похибки квантування.
Компоненти виразу (28) доцільно розділити на дві складові:
![]() , (29)
, (29)
де
![]() - похибка, внесена чутливим елементом;
- похибка, внесена чутливим елементом;
![]() - похибка, внесена блоком електроніки.
- похибка, внесена блоком електроніки.
Згідно технічного завдання гранична зведена до діапазону вимірювання похибка гр ІВП не повинна перевищувати 1,0%. Відповідно, гранична абсолютна похибка повинна відповідати умові
![]() , (30)
, (30)
де Тxmax, Тxmin – максимальне та мінімальне значення вимірюваної температури. Виходячи з ТЗ гр= 1С.
Проведемо оцінювання складових похибки (27). Для сучасних засобів вимірювання характерним є зменшення питомої ваги складової похибки, що вноситься вторинною апаратурою (в даному випадку доцільніше вживати термін електронною частиною вимірювача). Це зумовлено високими метрологічними характеристиками сучасної елементної бази. Будемо вважати, що складова похибки, внесена чутливими елементами, складає близько 2/3 загальної похибки вимірювання. Таким чином, складова граничної похибки вимірювання, що вноситься чутливим елементом повинна задовільняти умову
![]() , (31)
, (31)
де гр – значення допустимої абсолютної похибки вимірювання температури згідно ТЗ.
Згідно з ДСТУ-2858-94, поряд з поліномом, що описує номінальну статичну характеристику ТО, нормують номінальне значення W100 = R100 /R0 (тут R100 – опір ТО при 100С) та його допустиме відхилення для кожного класу чутливого елемента (класи А, В, С). Можна показати, що
![]() . (32)
. (32)
Враховуючи, що ЧЕгр є функцією Rxi, будемо розглядати найгірший випадок при Rxi= Rximax. Згідно ТЗ Rximax62 Ом. За умови використання чутливих елементів класу В [1, 2] відносна похибка опору R0 Ro 0,1%, а допустима абсолютна похибка W100 W100 0,0005. Відповідно, W100 0,035%. Згідно виразу (32) 4,810-6. Таким чином, ЧЕгр 0,37С, що задовільняє умову (31).
Складова граничної похибки вимірювання ІВП, що вноситься блоком електроніки, може бути поданою у вигляді:
![]() (33)
(33)
і повинна задовільняти умову
![]() . (34)
. (34)
Враховуючи, що номінальне значення Аном=1 та вираз (23), отримаємо
![]() (35)
(35)
Оскільки алгоритм вимірювання описується виразом (24), то приймаємо максимальну похибку коефіцієнта В В=100%, а коефіцієнта А - А =(1-Аmin)100%.
Таким чином, основні джерела похибки вимірювання наступні: наявність розкиду kmax значень опору каналу вхідного комутатора в відкритому стані; наявність значної синфазної складової на вході ДП; скінченна розрядність АЦП та вплив завад і шумів тракту перетворення. Для спрощення наведених вище виразів не враховано вплив струмів витоку каналів вхідного комутатора в закритому стані. Це, здебільшого, є причиною обмеження кількості каналів вимірювання в багатоканальних засобах вимірювання.
Окрім того, блок первинних перетворювачів, що являє собою послідовне з’єднання ТО, може мати значну довжину (30м і більше). Тому на результат вимірювання можуть мати значний вплив опори провідників між сусідніми ТО. Якщо вважати, що опори вказаних провідників є однаковими, то їх вплив можна усунути алгоритмічно. В об’ємі даного прикладу не будемо зупинятися на конкретних алгоритмах такої корекції.
Як видно з наведених вище виразів, автокалібрування дозволяє зменшити лише систематичну складову похибки, в той час як випадкова складова буде нагромаджуватися. Тому слід звернути особливу увагу на похибку квантування АЦП, оскільки вона носить випадковий характер. В більшості випадків доцільно розрядність АЦП обирати таким чином, щоб абсолютна похибка квантування не перевищувала 10% від заданої граничної абсолютної похибки вимірювання. Для багатьох АЦП слід враховувати, що реальне значення похибки квантування може суттєво перевищувати значення, визначене згідно виразу для ідеального АЦП [12]:
![]() (36)
(36)
за рахунок значної диференційної похибки нелінійності [12]. Тут n – кількість розрядів АЦП.