Коэффициент полезного действия механизма
Механическим к. п. д. машины называют отношение абсолютного значения работы полезных сопротивлений АП.С. к работе движущих сил АД за период установившегося движения:
![]()
Из
уравнения движения машины при
установившимся движении
![]() находим
находим
![]() .
.
После
подстановки
![]() в
выражение (1) получим следующее выражение
для к. п. д.:
в
выражение (1) получим следующее выражение
для к. п. д.:
![]() ,
,
где
![]() - коэффициент потерь.
- коэффициент потерь.
К.
п. д. тем больше, чем меньше работа вредных
сопротивлений. Определив, например,
мгновенные к. п. д. в двенадцати положениях
рычажного механизма за один оборот
установившегося движения, можно построить
график функции
![]() .
На практике обычно пользуются средним
арифметическим значением к. п. д. за
период установившегося движения:
.
На практике обычно пользуются средним
арифметическим значением к. п. д. за
период установившегося движения:
![]() .
.
Машина может иметь очень низкий мгновенный к. п. д. в отдельных положениях механизма. Мгновенный к. п. д. рычажного механизма можно выразить как отношение мощностей:
![]() ,
,
где NП.С. - мгновенная мощность сил полезного сопротивления для каждого положения механизма;
NД - мгновенная мощность движущих сил для соответствующего положения механизма.
Общий к. п. д. машины при последовательном соединении механизмов равен произведению их к. п. д.:
![]() .
.
К. п. д. группы параллельно соединенных механизмов или машин. Это соединение характеризуется разветвлением общего потока энергии.
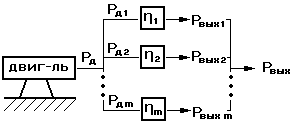
Общий к. п. д. равен:
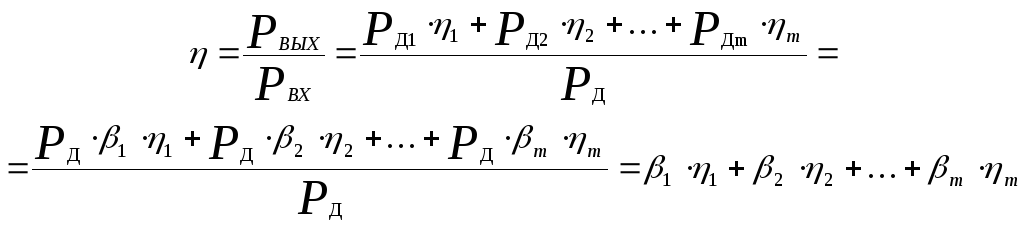 ,
,
где β – коэффициенты распределения мощности.
Приведение сил
Рассмотрим механизм с одной степенью свободы
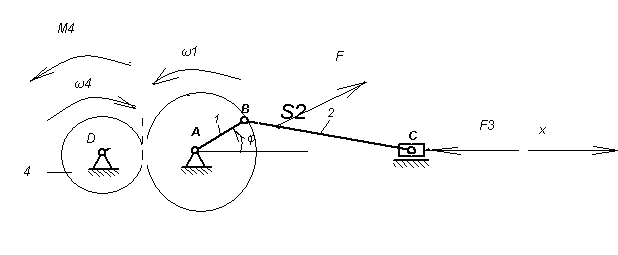
Выберем в качестве начального, звено 1. Механизм нагружен силами F и F3 и моментом М4. Заменим механизм его динамической моделью
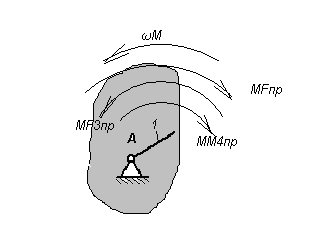
и приведем к ней обе силы и момент. В результате обе силы и момент будут представлены в виде соответствующими приведенными моментами.
![]()
При приведении сил должно быть соблюдено условие равенства элементарных работ.
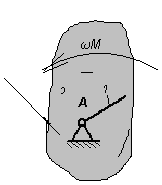
Приведение масс.
![]()
Сосредоточим
в динамической модели инертность всех
звеньев механизма;
![]() - эквивалент инертности всего механизма
– приведенный момент инерции. При
приведении масс должно быть соблюдено
условие равенства кинетических энергий.
Так как ни планы возможных скоростей,
ни аналоги скоростей от закона движения
механизма не зависят, то приведение
масс и приведение сил можно делать и не
зная закона его движения.
- эквивалент инертности всего механизма
– приведенный момент инерции. При
приведении масс должно быть соблюдено
условие равенства кинетических энергий.
Так как ни планы возможных скоростей,
ни аналоги скоростей от закона движения
механизма не зависят, то приведение
масс и приведение сил можно делать и не
зная закона его движения.
Уравнение движения механизма
Выполнив
приведение сил и масс, любой механизм
с w=1, каким бы сложным он
ни был, можно заменить его динамической
моделью. Модель в общем случае имеет
переменный приведенный момент инерции
![]() и к ней приложен суммарный приведенный
момент
и к ней приложен суммарный приведенный
момент
![]() .
Закон движения модели такой же, как и
закон движения начального звена
механизма.
.
Закон движения модели такой же, как и
закон движения начального звена
механизма.
Уравнение движения в дифференциальной форме:
![]() ,
,
Уравнение движения в форме кинетической энергии:
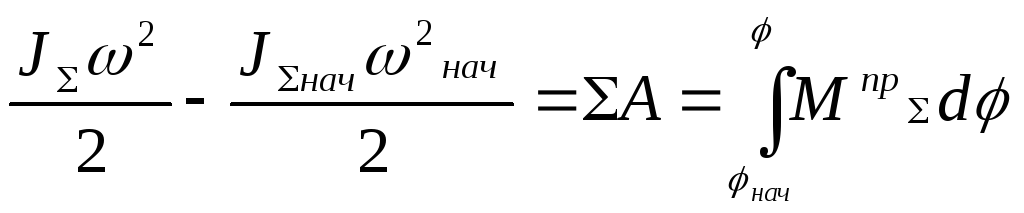
где![]() - суммарный приведенный момент,
- суммарный приведенный момент,
![]() -
приведенный момент инерции механизма.
-
приведенный момент инерции механизма.
При разгоне (разбеге) маховика
![]()
При установившемся движении
![]()
При выбеге (торможении)
![]() ,
где
,
где
![]() -
работа движущих сил
-
работа движущих сил
![]() -
работа сил сопротивления
-
работа сил сопротивления
Коэффициент неравномерности вращения ротора:
![]()
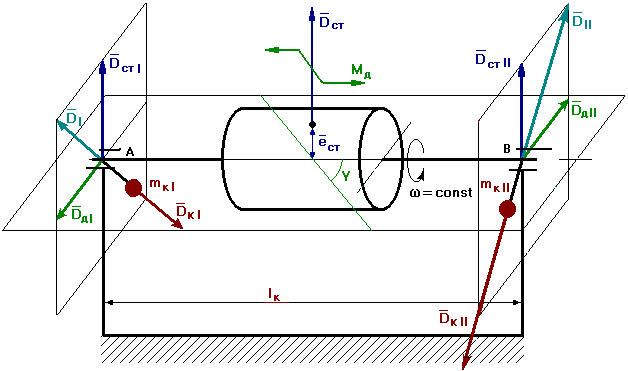
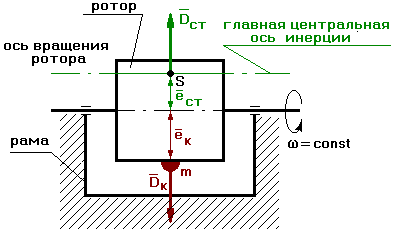
Уравновешивание механизмов
Механизм называют статически неуравновешенным, если общий главный вектор сил инерции механизма не равен нулю.
Статическая неуравновешенность ротора:
главная центральная ось инерции ротора расположена параллельно оси его вращения, а центр масс ротора смещен от оси вращения на величину е статическое.
Моментная неуравновешенность ротора:
центр масс ротора расположен на оси его вращения, главная центральная ось инерции повернута относительно оси вращения на некоторый угол .
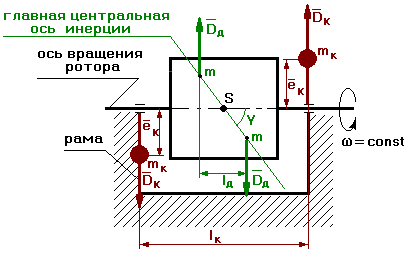
Динамическая неуравновешенность ротора:
центр масс ротора не лежит на оси вращения, и главная центральная ось инерции повернута на угол относительно оси вращения.