

Подготовка к интернет-экзамену по ТММ
Структурный анализ механизмов
Звено – твердое тело (может состоять из одной или нескольких деталей, которые не могут иметь относительного движения)
или
деталь или совокупность деталей, соединенных в одну кинематически неизменяемую систему.
Если мощность приложенных к звену внешних сил положительна, звено называют ведущим, если отрицательна или =0 – ведомым.
ТММ базируется на законах и положениях теоретической механики и решает две основные задачи – анализа и синтеза механизмов.
Задачи анализа – изучение методов исследования существующих механизмов.
Задачи синтеза – создание методов проектирования механизмов, удовлетворяющих высоким требования современной техники.
Структурный анализ механизмов - это определение числа подвижных звеньев, вида кинематических пар, числа степеней свободы.
Формула Сомова-Малышева для пространственного механизма
![]()
Формула Чебышева для плоского механизма
![]()
Классификация кинематических пар.
Все кинематические пары подразделяются по числу степеней свободы на одно-, двух-, трех-, четырех -, пятиподвижные.
Таблица №1
|
Число степеней свободы |
Число уравнений геометрических связей |
Название |
Рисунок |
Условное изображение |
|
1 |
2 |
3 |
4 |
5 |
|
1 |
5 |
Поступательная |
|
|
|
1 |
5 |
Вращательная |
|
|
|
2 |
4 |
Цилиндрическая |
|
|
|
3 |
3 |
Сферическая |
|
|
|
4 |
2 |
Цилиндр-плоскость |
|
|
|
5 |
1 |
Шар-плоскость |
|
|












Синтез механизмов
Синтез кинематической схемы механизма - по выбранной структурной схеме и заданной кинематической характеристике определить размеры звеньев, при которых они совершали бы требуемые движения.
Кинематический синтез рычажных механизмов (плоских механизмов с низшими парами) содержит задачи:
-
Синтез по нескольким заданным дискретным положениям звеньев;
-
Синтез заданной аналитической функции положения по отдельным заданным кинематическим параметрам (средней скорости, отношению средних скоростей при прямом и обратном ходах и т.п.);
-
Синтез по заданной траектории точки звена.
После выбора структурной схемы механизма определяют геометрические размеры звеньев. При этом учитываются в основном кинематические функции, которые должен реализовывать механизм – это этап кинематического синтеза, в рамках которого определяют относительные размеры звеньев, т.е. отношение геометрических размеров звеньев к размеру одного из них.
Этап точностного проектирования – анализ механизма по степени точности воспроизведения заданной функции.
По принципу использования рычажные механизмы делятся на группы:
-
Передаточные механизмы – реализующие заданную функциональную зависимость между положениями входного и выходного звеньев или между их перемещениями;
-
Направляющие механизмы – в которых точка на звене, совершающем сложное движение, перемещается при движении механизма по заданной траектории.
Важной кинематической характеристикой при синтезе механизма является проворачиваемость его звеньев (наличие в нем одного или двух кривошипов), которая зависит от соотношения длин звеньев. Для плоского шарнирного четырехзвенника – правило Грасгофа – самое короткое звено может быть кривошипом, если сумма длин самого короткого и самого длинного звеньев меньше суммы длин остальных звеньев:
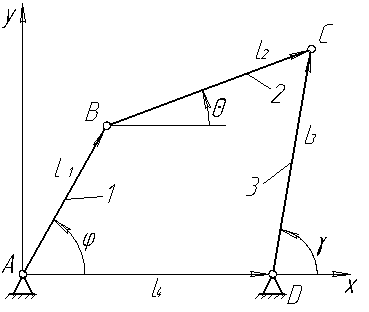
![]() .
.
Во внеосном кривошипно-ползунном механизме звено 1 будет кривошипом, если выполнено условие:
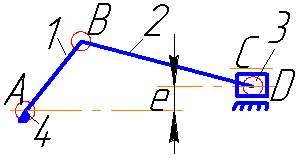
![]() .
.
В кулисном механизме звено 1 всегда будет кривошипом, звено CD (кулиса) будет кривошипом, если выполнится условие:
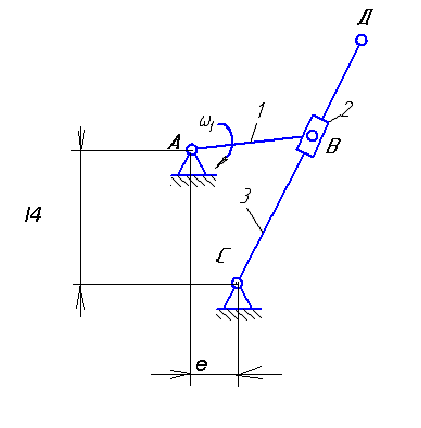
![]()
Условия синтеза механизма:
-
Главные – условия выполнения заданного движения исполнительного звена с заданной точностью (заданному линейному перемещению по траектории, заданному углу размаха выходного звена, заданному закону изменения скорости или ускорения);
-
Обязательные
-
Желательные
Последние два формулируются в форме неравенств (угол давления не должен превышать допускаемого значения) или назначаются из конструктивных соображений.