Активная помехоустойчивость
Вероятность ошибки приема можно повысить для элементарного сигнала за счет повторения (дублирования).
P1ош = 10–2
Pош = P1ош∙P2ош =10–4
Активная помехоустойчивость при передачи кодового сигнала – это применение кодов, исправляющих ошибки.
Пассивная помехоустойчивость
Пассивная помехоустойчивость – коды, обнаруживающие ошибки.
Pпр = 1 – Pош – Pпас
Pош = Cmn Pmош(1 – Pn)n–m
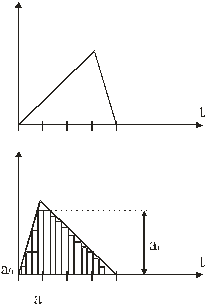
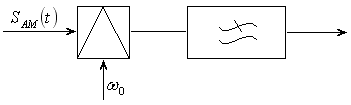
Оценка элементарного сигнала

S(t) = Sm
sinω0 t,
t![]() tи.
tи.
1 – S(t)
0 – 0
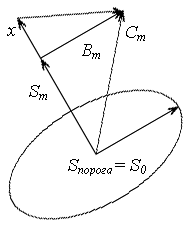
P1(1) = P(C ≥ S0)
P1(0) = P(C < S0)
P0(0) = P(B < S0)
P0(1) = P(B ≥ S0)
I0 – коэффициент нулевого порядка Беселевой функции разложения по аргументу.
![]()
Pош = 0.5[P1(0)+P0(1)]
|
|
|
|
|

Если отыскать минимум этой функции по
h, то получим, что при
z оптимальном
![]() или
или
![]() :
:
![]()
Если h≥3, то

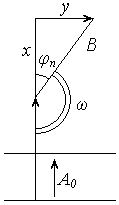
Оценка помехоустойчивости когерентного приема
1 – S(t) = Am sinωt
0 – 0
при 1 → 0
![]()
при 0 → 1
![]()
B cosφn = x

|
|
|
|

![]()

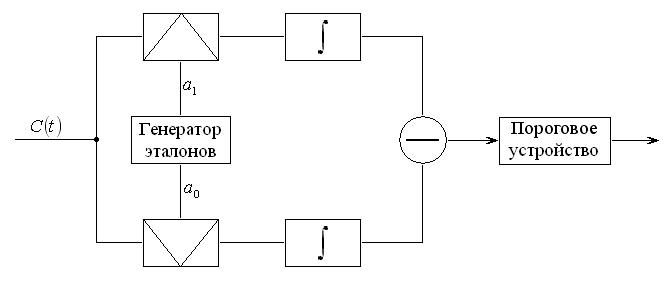
Потенциальная помехоустойчивость
Потенциальная помехоустойчивость – помехоустойчивость при получении максимальных значений сигнал – шум на выходе приемника.
|
|
W(c/a0) W(c/a1) c = f(a;b) |
0 → a0
1 → a1
W(c/a0) – условие принимаемого сигнала при передаче 0
W(c/a1) – условие принимаемого сигнала при передаче 1
Допустим:
-
помеха – белый шум;
-
помеха имеет аддитивную характеристику ci = ai + b;
-
аппаратура работает надежно и без помех ошибки нет;
-
синхронизация идеальна.
H0 гипотеза – 0
H1 гипотеза – 1
Тогда вероятность, что принята 1 будет определяться
![]() ,
n = 2FcTc
,
n = 2FcTc
![]()
![]()
Критерий Байеса
L00 – правильное решение принятия нуля H0/a0
L10 – ошибочное решение принятия нуля H1/a0
L11 – правильное решение принятия единицы H1/a1
L01 – ошибочное решение принятия единицы H0/a1
0 → P0
1 → P1
Байес:

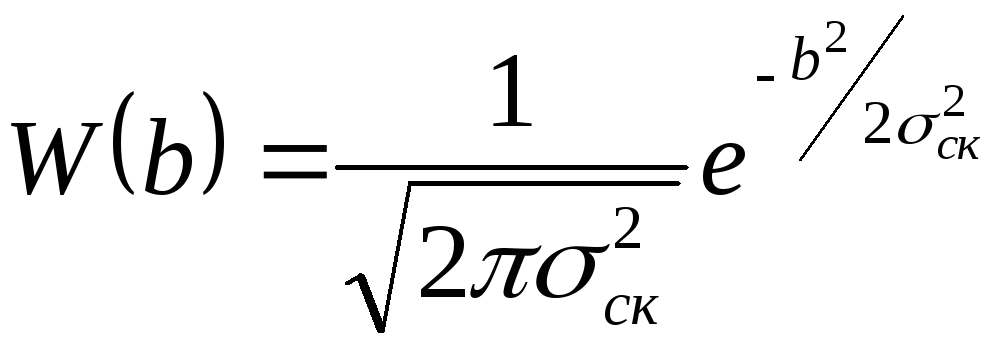
W(c/ai) = W(c – ai) = W(b)
W(bi) = ПW(b)
![]()
![]()
Условие плотности распределения:



Если L10 = L01
L00 = L11
то получим критическую аппроксимацию вероятности:

Если P0 = P1
L10 = L01
L00 = L11
то получим:





![]()
0 → 0
1 → а

![]()
![]()
![]()
Если K0 =
1, то
![]() .
.
Чем больше α, тем меньше вероятность ошибки.

![]()
![]()
![]()
Это и есть частотно-манипулированный сигнал.
![]()
![]()
![]()
![]()
![]()
Это и есть фазоманипулированный сигнал.


![]() ,
где
,
где
![]() .
.
Чтобы повысить потенциальную помехоустойчивость можно увеличить базу за счет расширения полосы пропускания или за счет увеличения времени длительности сигнала.
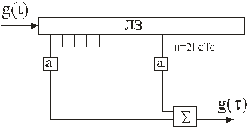
Согласованный фильтр
|
|
|
![]()
![]()
![]()
![]()
Где
![]() – фазовый спектр входных сигналов.
– фазовый спектр входных сигналов.
![]()
Спектральная плотность шума:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Модуль фильтра совпадает с модулем фазы сигнала.
![]()
Импульсная характеристика фильтра (реакция фильтра на дельта-функцию).
Полезный сигнал вместе с шумом на δx фильтра имеет амплитуду:
![]()
![]()
![]()
Согласованные фильтры.
![]() E
– энергия сигнала
E
– энергия сигнала
![]()
Желательно, чтобы на входе стоял фильтр
S(t) – полезный цикл : S(t)---F(j)
Помеха характеризуется G0: b(t)---G0(j)
![]()
![]() -
фаза (ЧХ)
-
фаза (ЧХ)
![]()
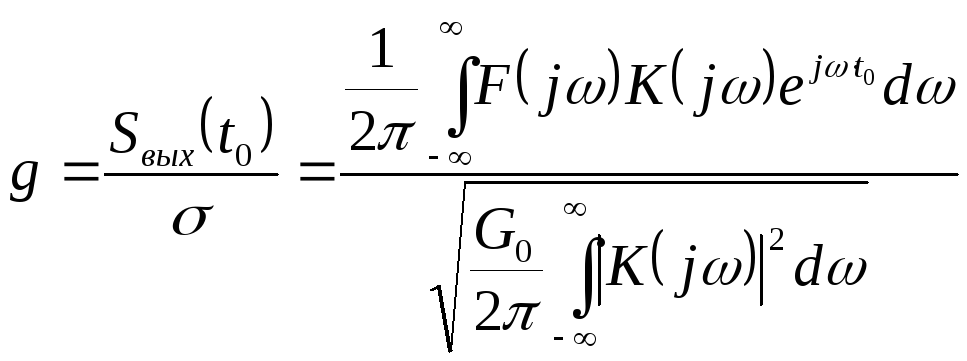
Тогда выходной сигнал на выходе фильтра можно обозначить через:
![]()
![]()
Мощность шума
![]()
Тогда

Допущения:
-
Каждая функция звена будет выглядеть следующим образом:
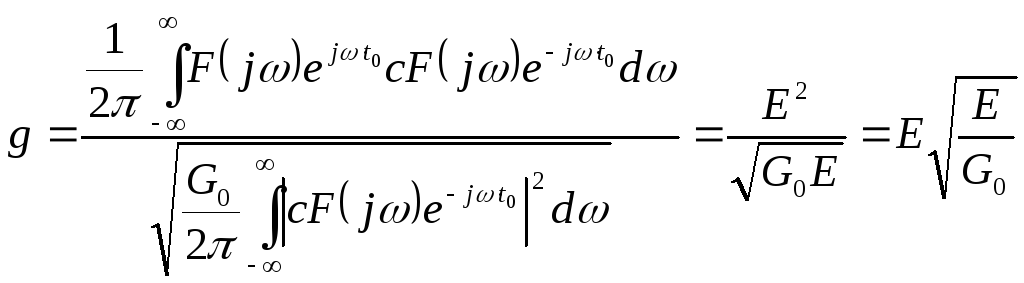
K(j)=CF*(j)e-jt0
С=const
F*(j) – определенное F(j)
 F(j)=
F*(j)
F(j)=
F*(j)
e-jt0- jt0=e0=1
![]()
Необходимо чтобы фильтр имел постоянную передачу, совпадающую с сопряженной плотностью входящего сигнала, т.е. фильтр д.б. согласован с конкретным сигналом, т.е он должен обладать
K(j)=CF*(j)e-jt0
Если теперь дописать
F*(j)=F(j)e-j, то учитывая, что K(j)=CF*(j)e-jt0
K(j)=K()e-j
K()=CF(j)
t0)
Тоесть модуль фильтра с точностью до const коэффициента совпадает с плотностью спектра сигнала, а фазовая характеристика должна быть обратна фазовому спектру сигнала и компенсируется фазовыми изменениями постоянного фильтра.
Запишем передаточную функцию фильтра в виде
K(j)=K()e-j=CF()e-j(t0)=CF(j)e-je-jt0=CF*(j)e-jt0
Импульсная характеристика фильтра – это реакция на дельта функцию
![]()
![]()
Учитывая 
Поэтому полезный сигнал вместе с шумом
на входе фильтра имеет амплитуду
спектральной плотности, определяемую
![]() .
Следовательно, он может быть представлен
входным сигналом как
.
Следовательно, он может быть представлен
входным сигналом как
![]() .
.
Т.е. импульсная характеристика фильтра – это
![]() ,
,
Т.е. оптимальный фильтр обеспечивает
на выходе максимальное отношение сигнал
– шум и должен иметь импульсную
характеристику, которая в точности до
постоянной составляющей «с» совпадает
с зеркальным отображением входного
сигнала относительно точки с абсциссой
![]() .
.
Предположим, что входной сигнал
 .
.
Мы говорим, что импульсная характеристика
![]() ,
т.е.
,
т.е.
![]() ,
где Т – длительность сигнала, т.е.
постоянная фильтра
,
где Т – длительность сигнала, т.е.
постоянная фильтра
![]() есть время действия сигнала.
есть время действия сигнала.
![]()

Обозначим
![]() ,
тогда
,
тогда
![]() .
.
Тогда
![]() - выходной сигнал:
- выходной сигнал:
![]()
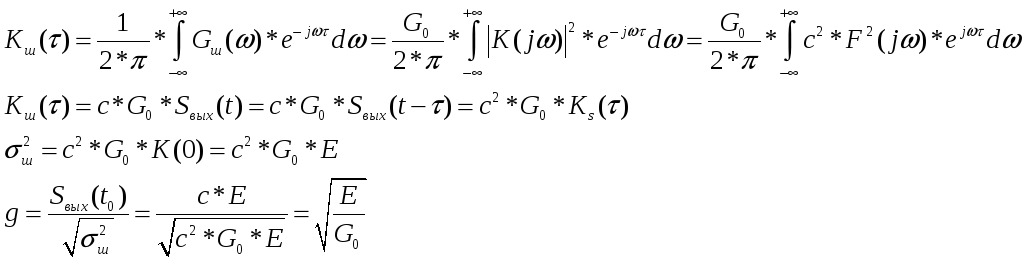
![]() - корреляционная функция:
- корреляционная функция:
![]()
Выходная функция сигнала оптимального фильтра есть функция корреляции. Поэтому согласованный фильтр называется пассивным коррелятором.
![]()
Нас не интересует форма сигнала, нам интересна энергия сигнала.
![]()
Следовательно, корреляционная характеристика:
Пример.
Пусть используем такой сигнал
|
|
|