

Лабораторна робота 5
ДОСЛІДЖЕННЯ ДВИГУНІВ ПОСТІЙНОГО СТРУМУ
Мета роботи
Ознайомлення з методами експериментального дослідження і властивостями двигунів постійного струму з паралельним і послідовним збудженням.
Теоретичні положення
Електричний двигун – це перетворювач електричної енергії, яку підведено від зовнішньої електричної мережі, у механічну енергію, що опрацьовується на валу двигуна.
На відміну від генератора, безпосереднім навантаженням двигуна є механічний момент М мх , який протидіє обертанню ротора, а не струм кола якоря, хоч цей струм і буде залежати від ступеня навантаження.
Електромагнітний момент двигуна постійного струму, так як і генератора, створюється внаслідок взаємодії струму якоря з магнітним потоком повітряного зазору, але у двигуні цей момент сприяє обертанню ротора, у той час як у генераторі він протидіє обертанню.
Під час обертання ротора двигуна в обмотці якоря виникає ЕРС, яка має таку ж фізичну природу що і ЕРС обмотки якоря генератора, але у двигуні ця ЕРС протидіє проходженню струму через обмотку якоря і тому її називають проти-ЕРС.
Тому рівняння електричної рівноваги у колі якоря двигуна постійного струму має вигляд :
![]() .
(5.1)
.
(5.1)
Фізичний зміст рівняння (5.1) дуже простий: напруга зовнішньої мережі повинна бути такою, щоб зрівноважити дію проти-ЕРС Е і падіння напруги у колі якоря.
У номінальному режимі роботи біля 90% напруги, прикладеної до якоря, врівноважується проти-ЕРС.
При ідеальному холостому ході (коли результуючий момент опору обертанню ротора дорівнює нулю) уся прикладена до кола якоря напруга цілком зрівноважується проти ЕРС обмотки якоря і тому кутова швидкість обертання ротора дорівнює:
![]() .
.
Реальний двигун навіть при відсутності моменту навантаження має на валу невеликий момент опору обертанню М0, зумовлений тертям ротора об повітря, тертям вала у підшипниках, тертям у щітково-колекторному вузлі, а також іншими втратами енергії при холостому ході. Тому струм кола якоря двигуна хоч і малий, але не дорівнює нулю.
Електромагнітний момент
двигуна Мем
математично може бути визначений як
відношення електромагнітної потужності
Рем=![]() до частоти обертання
до частоти обертання
![]() ,
тобто:
,
тобто:
![]() .
(5.2)
.
(5.2)
На практиці часто замість
кутової частоти обертання
![]() використовують частоту обертання n,
яку вимірюють в обертах за хвилину.
використовують частоту обертання n,
яку вимірюють в обертах за хвилину.
Тоді рівняння (5.2) приймає вигляд :
Мем=
См![]() ,
(5.3)
,
(5.3)
де
![]() Ce
коефіцієнт
моменту.
Ce
коефіцієнт
моменту.
Надалі будемо вважати, що
обертання ротора характеризується
кутовою частотою
![]() і тоді См
= Се
.
і тоді См
= Се
.
Для системи “двигун – навантажувальний механізм”, як і для будь-якої механічної системи, згідно з другим законом механіки маємо:
![]() ,
(5.4)
,
(5.4)
де
![]()
момент, який створює двигун; МГ
гальмівний момент,
який створює механізм; J – момент
інерції системи, приведений до валу
двигуна ;
момент, який створює двигун; МГ
гальмівний момент,
який створює механізм; J – момент
інерції системи, приведений до валу
двигуна ;
![]() кутове прискорення.
кутове прискорення.
З рівняння (5.4) випливає, що у сталому режимі роботи обертаючий момент двигуна дорівнює гальмівному моменту.
Для спрощення будемо вважати, що обертаючий момент двигуна дорівнює його електромагнітному моменту і таким чином, визначається формулою (5.2).
Робочі властивості двигунів оцінюються їхніми характеристиками, які бувають природними, штучними та експлуатаційними.
Природні характеристики знімаються за умови, що параметри двигуна та мережі мають номінальні значення.
Штучні характеристики знімаються за умови, що деякі параметри двигуна чи параметри мережі штучно змінені.
Експлуатаційні характеристики залежать від умов експлуатації двигуна, наприклад, від температури оточуючого середовища, потужності джерела живлення і т.д.
Ми розглянемо тільки дві характеристики двигунів постійного струму з паралельним і послідовним збудженням: механічну характеристику та моментну.
Механічною характеристикою
називають залежність частоти обертання
![]() від моменту опору обертанню М
у сталому режимі роботи за умови сталості
напруги живлення:
від моменту опору обертанню М
у сталому режимі роботи за умови сталості
напруги живлення:
![]() =f
(M)
при U =const.
=f
(M)
при U =const.
Моментною характеристикою називають залежність обертаючого (чи електромагнітного) моменту від струму якоря за оговорені вище умови. Для двигуна з паралельним збудженням з формул (5.1) і (5.2) маємо:
 (5.5)
(5.5)
Підставляючи нижнє рівняння системи (5.5) у верхнє, отримаємо рівняння механічної характеристики двигуна постійного струму з паралельним збудженням
![]() .
(5.6)
.
(5.6)
Рівняння (5.6) за умови, що магнітний потік Ф зберігає стале значення (тому що напруга U за умов зняття характеристики постійна), показує, що механічна характеристика двигуна являє собою падаючу пряму лінію (рис. 5.1).
Т
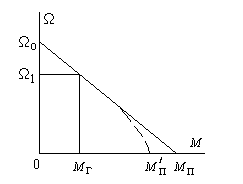 Рис.
5.1. Механічна характеристика двигуна
з паралельним збудженням
Рис.
5.1. Механічна характеристика двигуна
з паралельним збудженням![]() =
0, що відповідає режиму пуску двигуна.
=
0, що відповідає режиму пуску двигуна.
Тоді початковий пусковий момент Мп дорівнює:
Мп![]() ,
(5.7)
,
(5.7)
де Iп =![]()
початковий пусковий струм.
початковий пусковий струм.
Початковий пусковий струм
Iп
двигуна з паралельним збудженням у
багато разів перевищує номінальний
струм обмотки якоря, тому що опір кола
якоря двигуна дуже малий, а у момент
пуску проти-ЕРС Е =![]() відсутня, оскільки
відсутня, оскільки
![]() .
.
Як можна бачити, початковий пусковий струм не залежить від того, чи запускають двигун при навантажені, чи при холостому ході.
З рівняння (5.7) випливає, що двигун постійного струму внаслідок великого значення початкового пускового струму, також має достатньо великий початковий пусковий момент. Це є значною перевагою двигунів постійного струму порівняно, наприклад, з асинхронними двигунами змінного струму.
Під дією початкового пускового моменту двигун досить швидко збільшує частоту обертання, внаслідок чого зростає проти-ЕРС, що викликає зменшення струму у колі якоря і відповідне зменшення обертаючого моменту.
Як тільки обертаючий момент
зрівняється з гальмовим моментом Мг
, струм якоря
![]() і частота обертання ротора
і частота обертання ротора
![]() отримають сталі значення (рис. 5.1). На
валі двигуна розвивається механічна
потужність
отримають сталі значення (рис. 5.1). На
валі двигуна розвивається механічна
потужність
![]() .
.
Таким чином, на відміну від
початкового пускового струму, стале
значення струму якоря
![]() залежить від навантаження:
залежить від навантаження:
![]() .
.
Чим більше навантаження двигуна, тим більший струм якоря і тим більший вплив розмагнічуючої реакції якоря на магнітний потік у повітряному зазорі, який зменшується.
Внаслідок цього, механічна характеристика в області великих навантажень відхиляється від прямої, що показано на рис.5.1 пунктирною лінією.
М
Рис. 5.2. Моментна
характеристика двигуна з паралельним
збудженням
Двигун постійного струму з незалежним збудженням має такі ж характеристики, які має двигун з паралельним збудженням. Треба відмітити, що у невеликому діапазоні зміни навантажувального моменту швидкість обертання ротора двигунів з паралельним і незалежним збудженням змінюється незначно. Такі механічні характеристики називають жорсткими.
Тепер розглянемо механічну і моментну характеристики двигуна постійного струму з послідовним збудженням, схему якого зображено на рис.5.3.
У такому двигуні струм якоря
є одночасно струмом збудження, тобто
![]() .
.
В
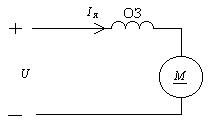 Рис.
5.3. Схема двигуна постійного струму з
послідовним збудженням
Рис.
5.3. Схема двигуна постійного струму з
послідовним збудженням![]() і підставляючи цей вираз у формулу
(5.3), для моменту двигуна з послідовним
збудженням отримаємо:
і підставляючи цей вираз у формулу
(5.3), для моменту двигуна з послідовним
збудженням отримаємо:
![]() (5.8)
(5.8)
Як випливає з формули (5.8) момент двигуна з послідовним збудженням, на відміну від двигуна з паралельним збудженням, пропорційний другому ступеню струму якоря.
Далі, вважаючи коефіцієнт
пропорційності К
між струмом збудження і магнітним
потоком постійним і підставляючи в
систему (5.5) значення потоку
![]() і струму якоря
і струму якоря
![]() ,
отримаємо рівняння механічної
характеристики двигуна з послідовним
збудженням:
,
отримаємо рівняння механічної
характеристики двигуна з послідовним
збудженням:
![]()
 ,
(5.9)
,
(5.9)
де
![]()
опір обмотки збудження .
опір обмотки збудження .
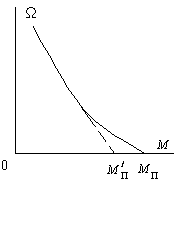
З формули (5.9) випливає, що механічна характеристика двигуна з послідовним збудженням являє собою гіперболічну криву, причому ця крива не перетинає вісь ординат, тобто частота обертання ротора при ідеальному холостому ході дорівнює нескінченності.
У
Рис. 5.4 Механічна
характеристика двигуна з послідовним
збудженням
Довільне збільшення частоти обертання у двигунів з послідовним збудженням при наближені до режиму холостого ходу називають розносом.
Розглянемо фізичну сутність розносу.
Як вже було відзначено, при
ідеальному холостому ході проти-ЕРС
![]() дорівнює напрузі U
мережі живлення, внаслідок чого струм
кола якоря дорівнює нулю. Але у двигуні
з послідовним збудженням рівність нулю
струму якоря означає рівність нулю
магнітного потоку (залишковим магнетизмом
нехтуємо). Тоді, для того, щоб проти-ЕРС
зрівноважувала напругу мережі, буде
потрібна нескінченна частота обертання
ротора.
дорівнює напрузі U
мережі живлення, внаслідок чого струм
кола якоря дорівнює нулю. Але у двигуні
з послідовним збудженням рівність нулю
струму якоря означає рівність нулю
магнітного потоку (залишковим магнетизмом
нехтуємо). Тоді, для того, щоб проти-ЕРС
зрівноважувала напругу мережі, буде
потрібна нескінченна частота обертання
ротора.
М
Рис. 5.5. Моментна
характеристика двигуна з послідовним
збудженням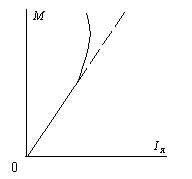
Внаслідок насичення магнітного кола двигуна з послідовним збудженням в області великих навантажень і одночасної дії розмагнічуючої реакції якоря магнітний потік залишається практично сталим, тому механічна характеристика у цій області лінійна, що показано на (рис.5.4) пунктирною лінією. З (рис.5.4) також можна бачити, що двигун з послідовним збудженням має м’яку механічну характеристику.
Початковий пусковий струм двигуна з послідовним збудженням, також як і двигун з паралельним збудженням, набагато перевищує номінальний і дорівнює:
Іп
![]() .
(5.10)
.
(5.10)
Моментна характеристика двигуна з послідовним збудженням, як це випливає з формули (5.8) являє собою квадратичну параболу (рис. 5.5).
Але в області великих навантажень, з вище названих причин, моментна характеристика наближається до лінійної, що показано на рис. 5.5 пунктирною лінією.