

5.7. Проектирование забоев и проходок драглайнов
Широкая область применения драглайнов объясняется тем, что они, осуществляя копание сверху, способны разрабатывать мелкие забои, но в то же время обеспечивают при необходимости и достаточно большие глубины копания Нкот,. достигающие 10—12 м. Драглайны обладают значительно большими, чем прямые лопаты, радиусами копания и разгрузки, высотой разгрузки. В то же время драглайны имеют специфическую форму забоя (рис. 5.13) с относительно пологой передней стенкой (угол порядка 45°), т. е. вынимают относительно меньший объем грунта в рабочей зоне, чем прямые лопаты, и обладают меньшей точностью работы. Во избежание непроизвольных нарушений окончательных форм выработок приходится мириться с недоборами грунта до проектных отметок порядка 0,1—0,2 м.
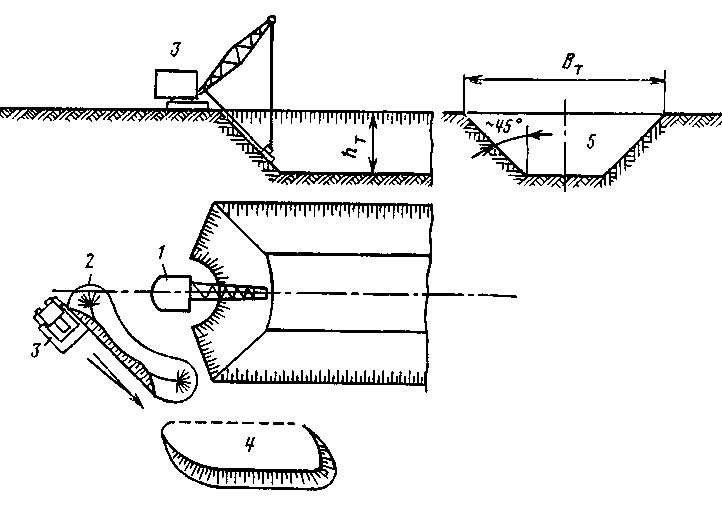
Рис. 5.14. Лобовая проходка драглайна при разработке выемки
в кавальер с помощью бульдозера: 1 - экскаватор; 2 - промежуточный отвал;
3 - бульдозер; 4 - кавальер; 5 - выемка в черновой разработке.
При продольном перемещении драглайна по оси выемки образуется лобовая проходка трапецеидального сечения с откосами крутизной около 45°. Лобовые забои применительно к драглайну называют иногда еще торцовыми.
Драглайнами удается вчерне разрабатывать однопутные выемки глубиной до 6—10 м, что практически исчерпывает все возможные варианты подобных работ в равнинной и холмистой местности. Более глубокие выемки встречаются здесь весьма редко, и лишь в горных условиях их удельный вес увеличивается примерно до 9% общего объема земляных работ. Однако самостоятельно отсыпать грунт непосредственно в кавальеры драглайн, идущий по оси выемки, не может, так как он практически полностью использует для копания наибольший вылет стрелы. Грунт отсыпают в промежуточный отвал и перемещают в кавальеры бульдозером (рис. 5.14).
При двустороннем расположении кавальеров экскаватор сначала разрабатывает одну половину забоя, отваливая грунт с этой же стороны, затем — другую, а на отвале попеременно то справа, то слева работает бульдозер. В этих условиях с учетом величины равной половине базы драглайна Ro и положения пяты стрелы, находящейся на высоте Уо, в соответствии с рисунком 5.15. величина минимального радиуса резания на уровне стоянки экскаватора Rmin может быть найдена как
![]() ( 5.9)
( 5.9)
где
![]() - угол откоса грунта при разработке
лобового забоя.
- угол откоса грунта при разработке
лобового забоя.
Одной
из особенностей драглайна в процессе
разработки грунта заключается в том,
что он благодаря гибкой подвеске ковша
способен подавать ковш на величину
большую, чем проекция стрелы на
горизонтальную плоскость. То есть ковш
может отклоняться от вертикали на угол
![]() .
В таком случае может быть определен
максимальный радиус резания Rmax.
При этом следует учитывать высоту
положения головки стрелы Нстр
и ее проекцию как практический радиус
резания Rрез.
.
В таком случае может быть определен
максимальный радиус резания Rmax.
При этом следует учитывать высоту
положения головки стрелы Нстр
и ее проекцию как практический радиус
резания Rрез.
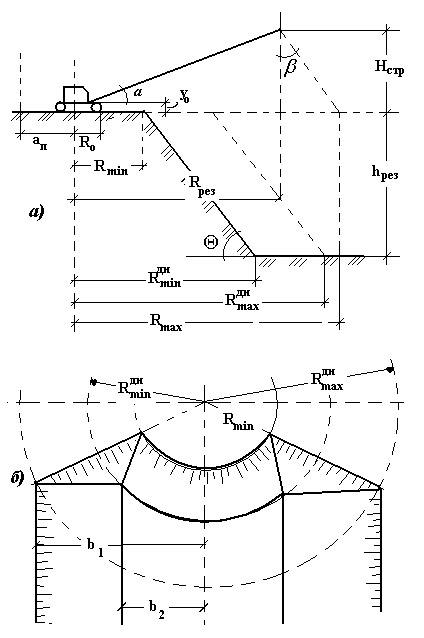
Рис. 5.15. Построение забоя лобовой проходки экскаватором
оборудованным ковшом драглайн: а - разрез по оси проходки; б - план забоя.
Отсюда следует, что максимальный радиус резания будет равен
![]() (5.10.)
(5.10.)
Аналогичным образом, с учетом глубины разрабатываемого резерва или котлована hp можно определить минимальный радиус резания Rдн min на уровне дна котлована или резерва
![]() (5.11)
(5.11)
В таком случае максимальный радиус резания на уровне дна котлована может быть найдено как
![]() (5.12)
(5.12)
В соответствии с конструктивным устройством и геометрическим формам ковша для того, чтобы в наибольшей степени можно увеличить глубину резания, экскаватору необходимо передвинуться назад на некоторую величину ап. Она может быть равна разнице между максимальным и минимальным радиусом резания на уровне дна котлована, то есть
ап = Rmaxдн - Rminдн (5.13)
Тогда в соответствии с теоремой Пифагора ширина котлована по верху будет равна
В =
2ּb1
=
![]() (5.14)
(5.14)
Если принять, что угол заложения откоса лобового забоя равен 450, тогда ширина котлована по низу составит
Вдн = 2ּb2 = 2 ( b1 - hрез) (5.15)
Строительная практика показывает, что при разработке линейно протяженных сооружений в комплекте с драглайном или экскаватором обратная лопате допустимо применение автосамосвалов. Однако, применение с драглайнами транспортных средств имеет двоякое влияние. С одной стороны, разгрузка ковша, раскачивающегося на канатах, в сравнительно небольшой по площади кузов автомобиля-самосвала сопряжена с затратой некоторого дополнительного времени на «прицеливание» и требует достаточного мастерства от машиниста. С другой стороны, организация работы транспортных средств при движении их за пределами выработки существенно упрощается. Во многих случаях удается заехать на погрузку без маневра. При сквозном движении транспорта вдоль экскаватора автомобили всегда размещаются сбоку, и угол поворота на разгрузку оказывается небольшим. Конечный результат будет зависеть от того, в какой мере повышение затрат времени на погрузку будет компенсировано снижением их из-за уменьшения углов поворота и ускорения работы транспорта.
Поэтому разработка драглайнами котлованов не имеет с позиций технологии экскаваторных работ каких-нибудь существенных особенностей в сравнении с разработкой выемок и карьеров. Если заезд транспорта в котлован не предусмотрен, что очень часто встречается в строительной практике, то котлован обычно разрабатывают, когда допускает конфигурация, сквозным (по всей длине) лобовыми и боковыми проходками с размещением транспортных средств сбоку от экскаватора. Если же заезд в котлован возможен, то нередко практикуют фронтальную разработку одной из стенок по ширине котлована. При этом экскаватор копает с одной стоянки сравнительно короткие «карманы», перемещаясь в поперечном направлении от «кармана» к «карману». Схема построения такого забоя показана на рис. 5.16.
С учетом
условных обозначений, показанных на
рисунке 5.16 расчет и построение бокового
забоя, как для драглайна, так и для
экскаватора обратная лопата, может быть
начат с расчета длины передвижки
экскаватора при его перебазировке на
новое место работы
![]() .
Она должна отвечать условию
.
Она должна отвечать условию
![]() (5.16)
(5.16)
где Rp - наибольший радиус резания на уровне дна выемки; R’p - наименьший радиус резания на уровне дна выемки.
Как известно, эти величины являются переменными и зависят от глубины котлована hk. Тогда
R’p = R’ст + hkּ ctgα (5.17)
Здесь R’ст - наименьший радиус резания на уровне стоянки экскаватора; угол α может быть принят равным 450.
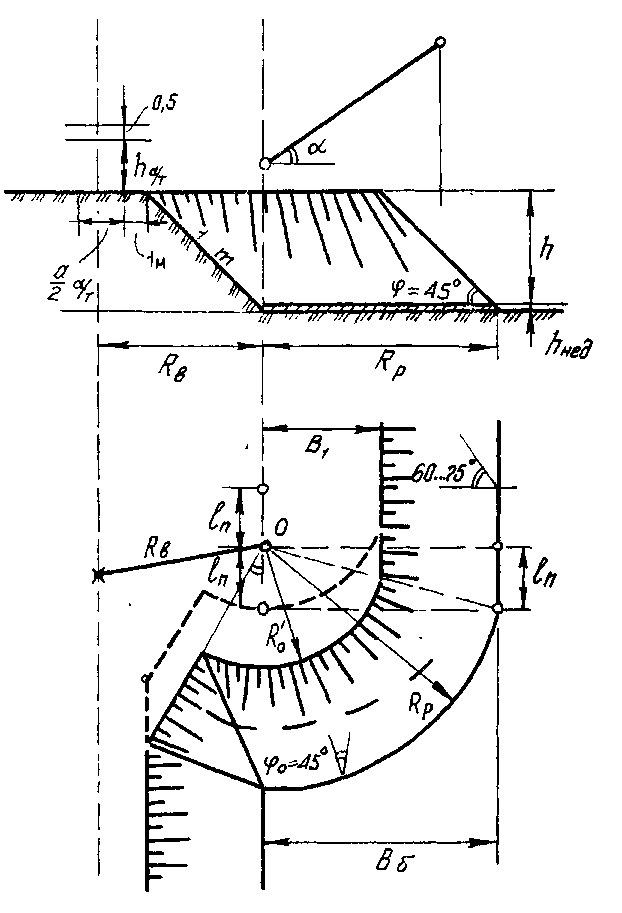
Рис. 5.16. Построение бокового забоя экскаватора
с обратной лопатой или драглайна.
В соответствии с условиями производства работ, наибольшее расстояние от оси движения экскаватора до нижней кромки бокового забоя при торцевой проходке b1, должно быть
b1 = Bб - hkּctgα (5.18)
где Bб
≤
![]() ,
Rст
- наибольший радиус резания на уровне
стоянки
экскаватора.
,
Rст
- наибольший радиус резания на уровне
стоянки
экскаватора.
Отсюда наибольшая ширина торцевой проходки при движении экскаватора по прямой
![]() (5.19)
(5.19)
Наибольшая ширина торцевой проходки па уровне стоянки экскаватора при движении его по прямой может быть
B’ ≈ 2( Bб - hkּctgα ) (5.20)
В таком случае наибольшая ширина каждой последующей торцевой проходки (если разрабатывают один борт выемки) должна быть
![]() (5.21)
(5.21)
Крутизна боковых откосов в забоях наибольшей ширины обычно не превышает 60—75°. Чтобы сделать откосы более крутыми, ширину проходки уменьшают, а экскаватор размещают ближе к боковому откосу. Для уменьшения угла поворота экскаватора, оборудованного обратной лопатой или драглайном, транспорт для погрузки подают к той стороне, где разрабатывают грунт.
Если ширина котлована превышает максимальные поперечные размеры одной проходки, разработку производят несколькими проходками. Причем первая проходка — лобовая или торцевая, вторая и последующие — боковые (рис. 5.17).
Вычисленные параметры, размещение экскаватора в плане и на разрезах, размещение транспортных средств, пути движения транспорта и другие данные переносят на схемы разработки котлована и забоев.
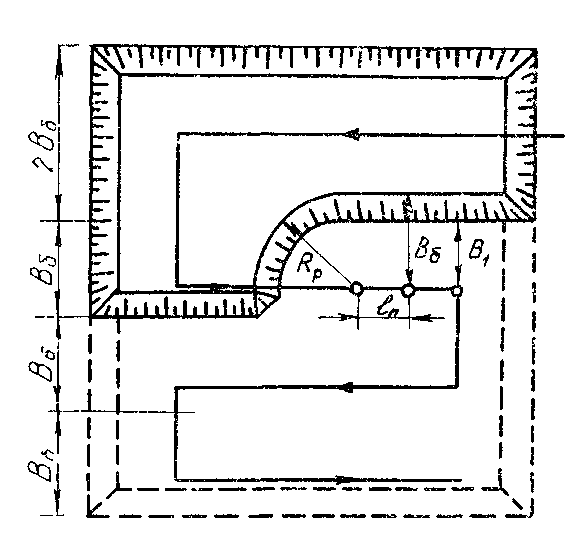
Рис. 5.17. Технологическая схема бокового забоя при разработке котлована экскаватором обратная лопата или драглайном
На плане котлована показывают также последовательность перемещения землеройной машины, въездные пути, последовательность многоярусных проходок и схемы транспортных путей.