

5.3.2. Астатическая система стабилизации заданного угла тангажа
Назначение – устранить статические ошибки, присущие статической системе. Возможны два варианта построения системы на базе существующей системы стабилизации заданной нормальной перегрузки.
-
В качестве базовой перегрузочной системы используют астатическую систему, заданную перегрузку формируют по закону
![]()
При этом полная и упрощенная структурные схемы системы имеют вид
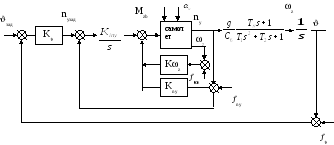

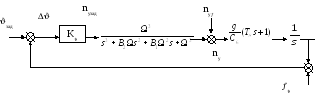


Данная система позволяет устранить статические ошибки стабилизации угла тангажа от
![]() и
и
![]()
Погрешность
датчика перегрузки
![]() вызывает
статическую ошибку по углу тангажа
вызывает
статическую ошибку по углу тангажа

Ошибка стабилизации угла тангажа, обусловленная погрешностью ДУ тангажа, имеет вид

Передаточное
число
![]() выбирают из условия обеспечения заданных
требований к качеству переходных
процессов.
выбирают из условия обеспечения заданных
требований к качеству переходных
процессов.
-
В качестве базовой перегрузочной системы используют статическую систему, заданную перегрузку формируют по закону
![]()
Структурная схема системы имеет вид
зад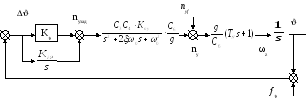



Введение
сигнала по интегралу ошибки
![]() в закон управления позволяет устранить
статические ошибки, обусловленные
ошибками стабилизации контура перегрузки
в закон управления позволяет устранить
статические ошибки, обусловленные
ошибками стабилизации контура перегрузки
![]() ,
ошибка, обусловленная погрешностью ДУ
тангажа
,
ошибка, обусловленная погрешностью ДУ
тангажа
![]() остается: невозможно точно управлять
координатой, если она измеряется с
ошибкой. Передаточные числа
остается: невозможно точно управлять
координатой, если она измеряется с
ошибкой. Передаточные числа
![]() и
и![]() выбирают на основании следующих
соотношений (более подробно см. Мосолов
В.Е., Харитонов В.Н. Системы автоматического
управления угловым движением ЛА 1995)
выбирают на основании следующих
соотношений (более подробно см. Мосолов
В.Е., Харитонов В.Н. Системы автоматического
управления угловым движением ЛА 1995)

![]()
При этом время переходного процесса определяется формулой
![]() .
.
Систему стабилизации заданного угла тангажа можно построить и как самостоятельный контур. Тяжелые и средние С-ты обладают более медленной динамикой углового движения с преобладанием режимов тангажного управления, поэтому СУ тангажом формируют без перегрузочного контура. Расчетные структурные схемы системы для статического и астатического законов управления представлены на рис. ниже
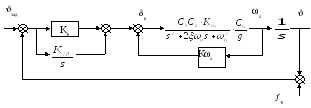
(Выбор передаточных чисел см., например, Мосолов В.Е., Харитонов В.Н. Системы автоматического управления угловым движением ЛА 1995)
5.4. Директорное управление ручкой управления самолетом в канале перегрузки по прибору или индикатору
Директорный режим управления освобождает летчика от операций по сбору и обработке информации о положении самолета, сводя задачу пилотирования в продольном движении к отработке команд управления по перегрузке, углу тангажа или угловой скорости тангажа.
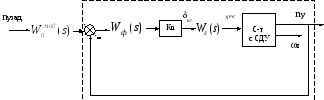
Основными элементами системы полуатоматического (директорного) управления являются вычислительное устройство (ВУ) и командный пилотажный прибор (КПП). На основе сигналов датчиков, характеризующих параметры движения самолета на заданной траектории, в ВУ вырабатывается командный сигнал, который используется для отклонения командной стрелки или индекса в командном пилотажном приборе. Задача летчика заключается в удержании командной стрелки или индекса в нулевом (среднем) положении. Функциональная схема системы полуатоматического (директорного) управления в канале перегрузки по прибору или индикатору представлена на рис. ниже
КПП ХРУС
ny ny
зад ny
ВУ ООУ (с-т
с СДУ) Летчик








ДЛУ



Отклонение стрелки или индекса указывает на необходимость изменения перегрузки определенной величины при этом стрелка или индекс устанавливается в среднее положение.
В современных самолетах для отображения командно-пилотажной информации применяются системы электронной индикации:
-
экраны многофункциональных цветных индикаторов, расположенные на панели приборов;
-
проекционные индикаторы на лобовом стекле, совмещающие инструментальное изображение параметров полета с обзором внешнего пространства.
Расчетная структурная схема системы имеет вид
где
![]() -
ПФ модели, характеризующей желаемую
динамику изменения перегрузки на
отклонение РУС летчиком;
-
ПФ модели, характеризующей желаемую
динамику изменения перегрузки на
отклонение РУС летчиком;
![]() -
ПФ низкочастотного фильтра, вводится
для фильтрации сигналов с целью снижения
колебательности индекса (стрелки) и тем
самым улучшения восприятия летчиком.
-
ПФ низкочастотного фильтра, вводится
для фильтрации сигналов с целью снижения
колебательности индекса (стрелки) и тем
самым улучшения восприятия летчиком.
Во внутренний контур входят: КПП, летчик и ООУ. ПФ замкнутой системы примет вид
![]()
Ко замкнутому контуру предъявляются два требования:
-
задача летчика по удержанию индекса (стрелки) должна быть достаточно проста – легче и точнее всего летчик выполняет функции простого усилителя;
-
полоса пропускания (быстродействие) замкнутого контура должна быть на порядок выше частотного диапазона полезного сигнала, поступающего на его вход – это позволяет рассматривать замкнутый контур в виде пропорционального динамического звена с единичным коэффициентом усиления, соответственно для полезного сигнала ПФ системы примет вид
![]()
Достоинством данной схемы включения летчика в процесс управления является независимость (инвариантность) ПФ системы от субъективных особенностей и квалификации летчика.
Учебная и методическая литература по разделу I
-
Мосолов В.Е., Харитонов В.Н. Системы автоматического управления угловым движением ЛА.-М.: МАИ, 1995.
-
Михалев И.А., Окоемов Б.Н., Чикулаев М.С. Системы автоматического управления самолетом. – М.: Машиностроение, 1987.
-
Гуськов Ю.П., Загайнов Г.И, Управление полетом самолетов. – М.: Машиностроение, 1980.
-
Серпионов Г.В., Березуев А.В., Мулин П.В. Введение в проектирование систем автоматического управления самолетами. МАИ, 1995.
-
Авиация ПВО России и научно-технический прогресс: боевые комплексы и системы вчера, сегодня и завтра / Под ред. Е.А. Федосова. Монография.-2 изд., - М.: Дрофа, 2004. – 816 с.: ил.