

Теоретична механіка – наука про найбільш загальні закони найпростішої форми руху матерії , яка ставить своїм завданням пізнання кількісних закономірностей механічного руху . 1.Статика
Статика – розділ теоретичної механіки , який вивчає методи перетворення одних систем сил в еквівалентні їм , а також умови рівноваги твердого тіла під дією сил
Сила – це величина , що є мірою механічної взаємодії двох сил . Сила – це векторна величина , ковзний вектор .
Матеріальна точка – нацпростіша модель матеріального тіла , розмірами якого при умовах даної задачі можна знехтувати .
Механічна система – сукупність взаємозв”язаних матеріальних точок , положення і переміщення кожної однієї з них залежить від положення і переміщення всіх інших .
Система сил – сукупність сил , які діють на тіло , яке розглядається .
Еквівалентні системи сил – це такі системи сил , які при їх взаємозаміні не змінюють стану спокою , або руху вільного твердого тіла .
Рівнодіюча сила – це сила , еквівалентна заданій системі сил .
Взаємозрівноважена система сил – система сил , яка є прикладеною до вільного твердого тіла , яке знаходиться в стані спокою , не виводить його з цього стану .
Абсолютно тверде тіло – матеріальне тіло , в якому відстань між двома точками не змінюється .
Вільне тіло – це таке тіло , на переміщення якого не накладені обмеження .
Вязі – це тіла , що обмежують рух вільного тіла .
Реакції в”язей – це сила з якою в”язь діє на тіло , рух якого вона обмежує .
Аксіоми статики:
1.Дві сили , що діють на абсолютно тверде тіло зрівноважені тоді і лише тоді , коли вони рівні по величині , протилежні за напрямком і діють вздовж однієї прямої .
2.Приєднання і відкидання взаємозрівноваженої системи сил не порушує рівновагу тіла .
Наслідок з аксіоми : Силу можна переносити вздовж лінії її дії.
3.Система двох сил , прикладених до матеріальної точки під деяким кутом одна до одної має рівнодійну , яка за своєю величиною і напрямом дорівнює діагоналі паралелограма , побудованого на цих силах , як на сторонах .
4.Сили взаємодії двох матеріальних точок завжди рівні за величиною і діють по одній прямій в протилежних напрямках .
5.Без порушення рівноваги тіла можна звільнити його від в”язей , приклавши до тіла реакції в”язей .
6.Рівновага твердого тіла не порушиться від накладених нових в”язей . Окремим випадком цієї аксіоми є принцип затвердіння : рівновага деформівного тіла не порушиться , якщо тіло вважати твердим .
Види в’язей і напрям їх реакцій :
Гладенька поверхня :

![]()
Види в’язей і напрям їх реакцій :
Вістря :

Види в’язей і напрям їх реакцій :
Гнучка в’язь :

![]()
Види в’язей і напрям їх реакцій :
Нерухомий шарнір :
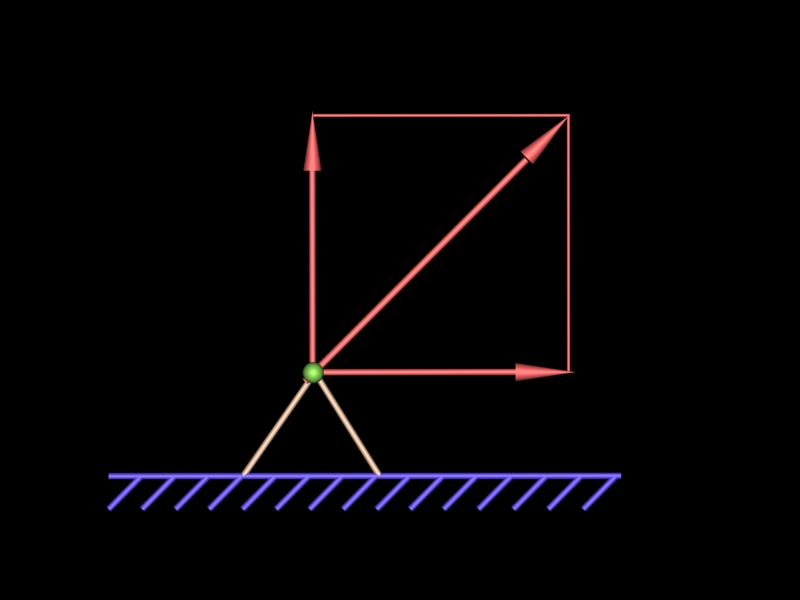
Види в’язей і напрям їх реакцій :
Підшипник і підп”ятник :

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Види в’язей і напрям їх реакцій :
Жорсте защімлення ( нерухоме закріплення ) :

![]()
![]()
![]()
![]()
1.Статика .
1.1. Статика на площині .
1.2. Система сил у просторі .
1.3. Центр ваги .
1.1. Статика на площині .
Збіжна система сил – це така система сил , лінії дії яких перетинаються в одній точці .
Рівнодійна система мил – це сила , яка еквівалентна даній системі сил .
Рівнодійна системи сил дорівнює векторній сумі цих сил :
Збіжна система сил .
Приведення до найпростішого вигляду .
Знаходження рівнодійної .
1) Геометрични спосіб : силовий багатокутник

![]()
![]()
![]()
![]()
![]()
2) Аналітичний
спосіб :
 модуль
рівнодійної .
модуль
рівнодійної .
Д![]() е
:
е
:
Напрям рівнодійної :
![]()

![]()
![]()
![]()
![]()
![]()
![]()
Умови рівноваги збіжної системи сил .
Для рівноваги збіжної системи сил необхідно і достатньо , щоб рівнодійна системи сил дорівнювала нулю , або сума проекцій цих сил на осі координат дорівнювала нулю :
![]() -
рівняння рівноваги збіжної
-
рівняння рівноваги збіжної
системи сил на площині .
Теорема про три непаралельні сили .
Якщо тіло перебуває в рівновазі під дією трьох непаралельних сил , що лежать в одній площині , то лінії дії всіх трьох сил перетинаються в одній точці .
Моментом
сили відносно точки
називається добуток величини сили на
довжину перпендикуляра , опущеного з
цієї точки на лінію дії даної сили :

![]()
М![]()
![]()
![]() омент
сили відносно будь-якої точки вважається
додатнім , якщо сила намагається повернути
площину , в якій вона лежить , навколо
даної точки в бік , протилежний ходу
годинникової стрілки і навпаки – якщо
за стрілкою годинника – момент вважається
від”ємним .
омент
сили відносно будь-якої точки вважається
додатнім , якщо сила намагається повернути
площину , в якій вона лежить , навколо
даної точки в бік , протилежний ходу
годинникової стрілки і навпаки – якщо
за стрілкою годинника – момент вважається
від”ємним .
П![]() ара
сил
– це дві рівні антипаралельні сили .
ара
сил
– це дві рівні антипаралельні сили .

![]()
![]()
![]()
Моментом пари сил – називається взятий з відповідним знаком добуток величини однієї з сил пари на плече пари .Знак момента пари визначається так : якщо пара намагається обертати своє плече проти руху годинникової стрілки , то момент вважається додатнім , в протилежному випадку – від’ємним .
Властивості пар .
1.Пара сил не має рівнодіючої . Тому пару сил не можна змінити або зрівноважити однією силою , її можна зрівноважити тільки парою .
2.Пару можна як завгодно переносити в її площині не порушуючи рівноваги тіла , а також замінювати іншою парою , що лежить у тій самій площині , з іншими силами пари і з іншим плечем пари , але при умові , що напрям обертання та величина момента пари залишаються незмінними , якщо
С![]()
![]()
![]() истема
довільної кількості пар у площині
еквівалентна одній парі , момент якої
дорівнює алгебраїчній сумі моментів
даних пар :
истема
довільної кількості пар у площині
еквівалентна одній парі , момент якої
дорівнює алгебраїчній сумі моментів
даних пар :
У![]() мова
рівноваги пар
– для рівноваги системи пар сил на
площині необхідно , щоб алгебраїчна
сума моментів цих пар дорівнювала нулю
:
мова
рівноваги пар
– для рівноваги системи пар сил на
площині необхідно , щоб алгебраїчна
сума моментів цих пар дорівнювала нулю
:
Важіль – це тверде тіло , що може обертатися навколо нерухомої осі і перебуває під дією сил , розміщенних у площині , перпендикулярній до цієї осі .

Умови рівноваги важеля :
Д![]() ля
рівноваги важеля необхідно , щоб
алгебраїчна сума моментів усіх сил ,
діючих на важіль , відносно центра
обертання важеля дорівнювала нулю :
ля
рівноваги важеля необхідно , щоб
алгебраїчна сума моментів усіх сил ,
діючих на важіль , відносно центра
обертання важеля дорівнювала нулю :
Лема про паралельний перенос сили :
![]()
С![]()
![]() ила,
що
прикладена в точці А , може бути перенесена
паралельно самій собі в яку-завгодно
точку В на площині при умові додавання
пари , момент якої дорівнює моменту сили
відносно
точки В , тобто :
ила,
що
прикладена в точці А , може бути перенесена
паралельно самій собі в яку-завгодно
точку В на площині при умові додавання
пари , момент якої дорівнює моменту сили
відносно
точки В , тобто :

Зведення системи сил на площині до найпростішого вигляду :
С![]() или
, довільно розміщенні на площині завжди
можуть бути зведені до однієї сили,
рівної їх головному вектору :
или
, довільно розміщенні на площині завжди
можуть бути зведені до однієї сили,
рівної їх головному вектору :
І![]() до пари сил , момент якої дорівнює
головному моменту даних сил відносно
центра зведення :
до пари сил , момент якої дорівнює
головному моменту даних сил відносно
центра зведення :
Випадки зведення :
1.Система сил зводиться до рівнодіючої :
2.Система сил зводиться до пари сил :
3.Система сил знаходиться у рівновазі :
4![]()
![]() .
То можна знайти такий центр зведення
О1 , відносно якого головний вектор
прикладений
у точці О1
, являє собою рівнодіючу системи сил .
.
То можна знайти такий центр зведення
О1 , відносно якого головний вектор
прикладений
у точці О1
, являє собою рівнодіючу системи сил .
Умови рівноваги довільної плоскої системи сил :
![]()
 -
умова рівноваги ;
-
умова рівноваги ;
Для рівноваги плоскої системи сил необхідно і достатньо , щоб алгебраїчна сума проекцій всіх сил на дві взаємно перпендикулярні осі дорівнювала нулю і алгебраїчна сума моментів усіх сил відносно будь-якої точки на площині дорівнювала нулю:

Відзначимо , що число рівнянь рівноваги плоскої системи сил в загальному випадку дорівнює трьом . Ці рівняння можна подати в різній формі , а саме :

(причому тут вісь ОХ перпендикулярна прямій АВ) , або :

( при чому тут точки А , В , С не лежать на одній прямій ) .

Умови рівноваги системи паралельних сил
Умови рівноваги системи паралельних сил – для рівноваги тіла під дією системи паралельних сил, що розміщені на площині , необхідно , щоб алгебраїчна сума проекцій усіх сил на вісь Y , паралельну силам , дорівнювала нулю і алгебраїчна сума моментів усіх сил відносно довільної точки О на площині дорівнювала нулю .
![]()
Статично означені і статично неозначені задачі :
Розв”язування задач статики по рівновагу тіл або точок аналітичним способом зводиться до розв”язування рівнянь їх рівноваги . Якщо число невідомих , що мають ьути визначені , менше або дорівнює числу рівнянь , то всі невідомі можуть бути визначені й така задача називається статично визначеною . Якщо ж число невідомих більше числа рівнянь рівноваги , то невідомі не можна визначити і задача називається статично неозначеною .
Рівновага системи тіл :
Існує два способи розв”язування задач на рівновагу системи тіл .
В першому – складаються рівняння рівноваги системи в цілому і , крім того , рівняння рівноваги n-1 її частини .
В другому – система в цілому не розглядається , а рівняння рівноваги складаються окремо для кожного без винятку тіла системи .
Для кожного тіла , на яке діють в площині сили , як завгодно розташовані , можна скласти три рівняння рівноваги , а для системи , яка складається з n тіл , можна скласти 3n рівнянь .
Тому якщо загальна кількість невідомих , включаючи внутрішні і зовнішні сили системи , невідомі кути , розміри і т.ін. , не перевищує 3n , задача є статично означеною і всі невідомі можуть бути знайдені .
Ферма .
Ферма – це геометрично незмінна конструкція , що складається з прямолінійних стержнів , зв”язаних між собою ідеальними шарнірами . В плоскій фермі всі стержні знаходяться в одній площині .Основні припущення при розрахунку плоских ферм такі :
1.Вузли ферми , в яких стержні з”єднуються між собою , вважаються шарнірами без тертя ( ідеальними ).
2.Зовнішні сили прикладені тільки в вузлах ферми і діють у площині ферми .
3. Вага стержнів мала порівнянно з іншими силами , що діють на ферму і тому нею можнаа нехтувати .
Розрахунок плоских ферм можна вести декількома способами :
1.Спосіб вирізання вузлів ( 1 ) .
2.Спосіб наскрізних перерізів ( спосіб Ріттера ) ( 1 ) .
3.Спосіб побудови діаграми Максвела - Кремони (1) .