

7.6. Электроприводы постоянного тока.
Конструкция двигателя постоянного тока (ДПТ) показана на рис. 7.6. На статоре расположена обмотка возбуждения, в данном случае – двухполюсная (бывает больше). В пазах ротора уложена обмотка, связанная с внешним миром через коллектор (устройство со скользящими контактами).
Статор
Коллектор
Ротор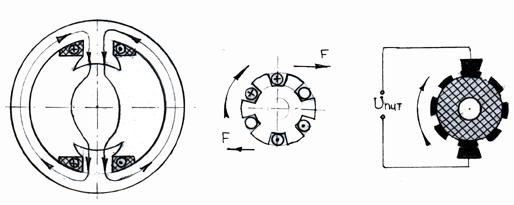
Рис. 7.6. Конструкция двигателя постоянного тока
Простейший вариант включения ДПТ приведен на рис. 7.7. Взаимодействие тока якоря с магнитным потоком обеспечивает вращающий момент. По мере выхода витков ротора из зоны наиболее эффективного взаимодействия с потоком возбуждения происходит переключения витков с помощью коллектора.
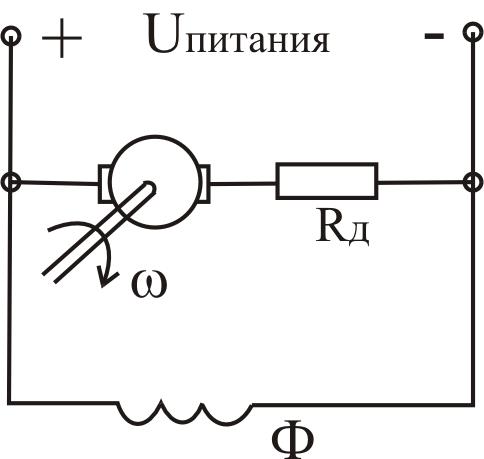
Рис 7.7. Включение ДПТ параллельного возбуждения
Коллектор – наиболее слабый в конструктивном отношении элемент ДПТ. По ходу работы он загрязняется угольной пылью (щетки обычно угольные), возникает искрение, обгорание пластин и т.д.
Основное достоинство ДПТ – простота управления скоростью. При включении по схеме рис. 7.7 напряжение и скорость вращения двигателя связаны выражением:
U=k φ ω+I Rд
Отсюда видно, что управлять скоростью можно с помощью добавочного сопротивления в цепи якоря (именно так управляются трамваи и троллейбусы старых типов). Но в относительно новых приводах с ДПТ обмотку возбуждения обычно запитывают от постоянного источника, добавочных сопротивлений в якоре не используют (по энергетическим соображениям), а регулирование ведут путем изменения напряжения питания ротора.
Организация такого электропривода показана на рис. 7.8. Здесь блок РС (регулятор скорости) обеспечивает сравнения текущей скорости с заданной. Блок СИФУ (система импульсно-фазового регулирования) имеет в своих выходных каскадах ТП (тиристорный преобразователь), управляемый за счет изменения момента включения тиристоров в пределах синусоиды напряжения питания (фазовое управление). В целом РС и СИФУ – сравнительно простые блоки, хотя бы потому, что регулируются только один параметр (напряжение питания ротора).
7.7. Управление электроприводами.
Системы управления электроприводами бывают разными по сложности. В простейшем случае управление нерегулируемым приводом достаточно электромеханических средств (рубильник, реле, предохранитель) для пуска, реверса, и защиты от перегрузки.
Наиболее сложным случаем управления регулируемыми электроприводами является управление скоростью при условии движения по заданной траектории. Характерные пример такого управления – приводы в составе станков с ЧПУ (числовое программное управление) – рис.7.9. Сигнал управления электроприводом формируется в виде двух слагаемых, первое из которых обеспечивает движение с заданной скоростью, а второе корректирует эту скорость, если по ходу работы имеется отклонение от траектории. Схема составлена применительно к координате Х ; аналогичные схемы предусматриваются и для других координат.
Uупр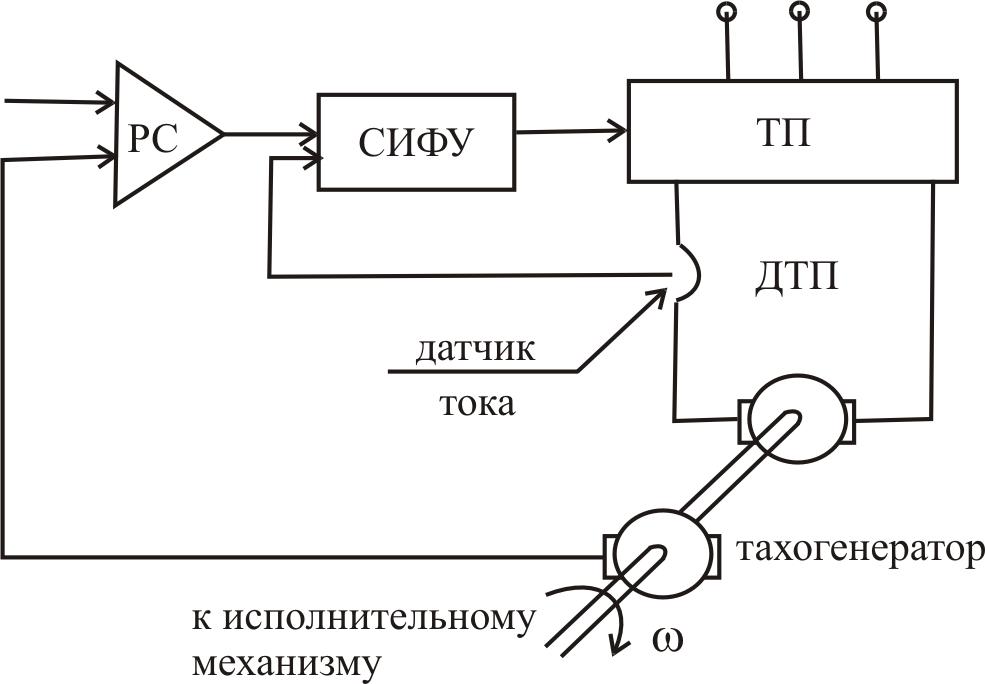
Рис. 7.8. Организация управляемого электропривода с ДПТ
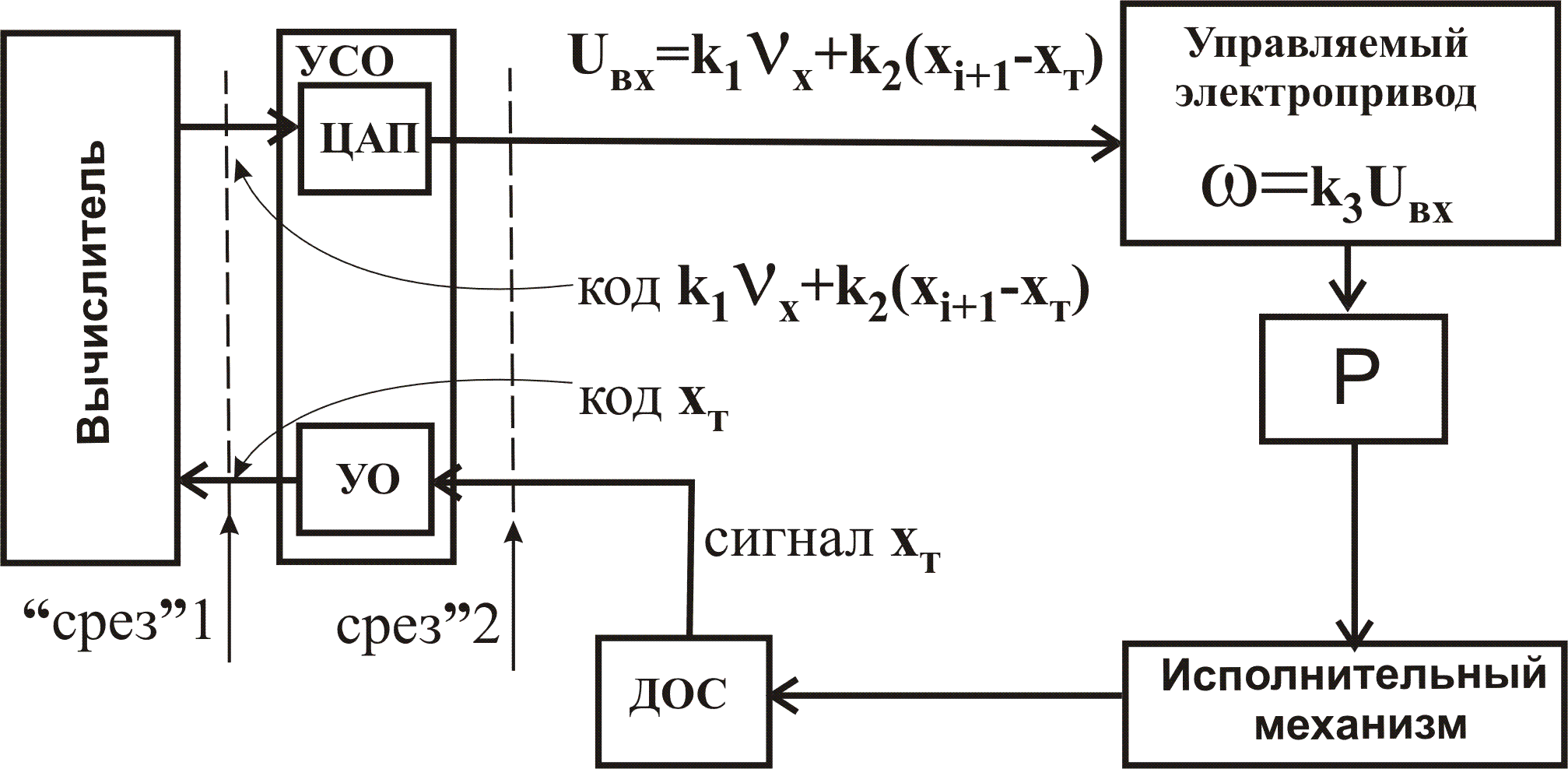
УСО – устройство связи с объектом
ЦАП – цифро-аналоговый преобразователь
УО – устройство обработки сигнала ДОС
ДОС – датчик обратной связи
xi+1 – задание по координате x
xт – текущее значение координаты
vx – заданная скорость
Р - редуктор
Рис. 7.9 Управление электроприводом от ЭВМ